Zespół Szkół Mechanicznych im. KEN
w Poznaniu
ul. Świerkowa 8
Technikum Mechaniczne
PRACA DYPLOMOWA
TEMAT: „ ZAPROJEKTOWAĆ PRZEKŁADNIE ZĘBATĄ
REDUKCYJNĄ DLA DANYCH:
P = 38 [ kW ] n1 = 1450 [ obr/min ] i przełożenie
i = i1 * i2 = 12 ”
Rafał Nowak
Klasa 5 T1
Profil: Technologia Budowy
Maszyn
Promotor: prof. Bożenna Urbaniak
POZNAŃ 2001 / 2002
SPIS TREŚCI
Wstęp pracy
Opis techniczny
Szczegółowy opis przekładni zębatej
Dokumentacja konstrukcyjna przekładni zębatej
Obliczenia konstrukcyjne przekładni zębatej
Zakończenie pracy
Literatura
Wstęp pracy
Tematem mojej pracy jest „ Zaprojektować przekładnie zębatą
redukcyjną dla danych: P = 38 [ kW ] n1 = 1450 [ obr/min ] i
przełożeniu i = i1 * i2 = 12 „ .
Przekładnie są to jedne z najstarszych mechanizmów , które
służą do przenoszenia ruchu obrotowego . Przekładnie zębate są
stosowane zarówno w małych mechanizmach zegarkowych , jak i w
napędach olbrzymich lotniskowców . Szczególne znaczenie mają
przekładnie przenoszące duże moce . Dlatego też w odniesieniu do tych
przekładni są wysuwane specjalnie wysokie wymagania dotyczące
pewności działania i ich długotrwałości . Od pracy przekładni często
zależy praca innych urządzeń , które są połączone ze źródłem energii za
pomocą przekładni . Bywa tak , że wymiana zużytej przekładni jest nie
tylko kosztowna lecz prowadzi również do unieruchomienia całego
urządzenia . Dlatego też zaprojektowanie i wykonanie przekładni zębatej
wiąże się z precyzją i musi być zgodne z wymaganymi względami
technicznymi i ekonomicznymi .
2. Opis techniczny
Przekładnia — mechanizm przenoszący ruch z jednego wału
(napędzającego) na drugi (napędzany) , najczęściej z jednoczesną
zmianą prędkości i momentu obrotowego .
Rozróżnia się przekładnie proste (pojedyncze) , przenoszące ruch
bez jakichkolwiek wałów pośrednich , i przekładnie złożone ,
przenoszące ruch z wału napędzającego (czynnego) na napędzany
(bierny) poprzez jeden lub więcej wałów pośrednich ; przekładnia
złożona składa się więc z dwóch lub więcej przekładni prostych .
Wielkościami charakteryzującymi przekładnie są przełożenie
przekładni , moc i moment obrotowy . Moc przekładni oblicza się ze
wzoru
gdzie:
N— moc przekładni [ KM ] ,
P— siła , którą jeden człon przekładni (np. koło zębate) działa na
drugie [ kG ] ,
v— prędkość punktu przyłożenia tej siły [ m/s ] ;
lub ze wzoru
gdzie:
M— moment obrotowy [ kG*m ] , w którym jeden człon przekładni
poruszający się z prędkością kątową [ 1/s ] , działa na drugi ;
zależności tej można nadać postać
gdzie:
M— moment obrotowy [ kG*m ] ,
N— moc przekładni [ kW ] ,
n— prędkość obrotowa [ obr/min ] ,
lub postać
gdzie:
M— moment obrotowy [ kG*m ] ,
N— moc przekładni [ KM ] ,
n— prędkość obrotowa [ obr/min ] .
W zależności od przeznaczenia przekładnia może mieć przełożenie
stałe (przekładnie multiplikacyjne , czyli przyspieszające , i przekładnie
redukcyjne , czyli zwalniające) lub zmienne (przekładnie zmianowe:
stopniowe i bezstopniowe , czyli o przełożeniu zmiennym w sposób
ciągły) . Przekładnie multiplikacyjne , redukcyjne i bezstopniowe
zamknięte w szczelnych obudowach są nazywane odpowiednio
multiplikatorami , reduktorami i wariatorami .
Zależnie od rodzaju członów przenoszących ruch z wału
napędzającego na napędzany rozróżnia się przekładnie mechaniczne ,
hydrauliczne , pneumatyczne i elektryczne . Należy przy tym podkreślić ,
że przekładniami hydraulicznymi i pneumatycznymi nazywane są nie
tylko mechanizmy o obrotowym ruchu członów napędzającego i
napędzanego , lecz także mechanizmy o posuwisto-zwrotnym ruchu tych
członów oraz takie , w których jeden z tych członów wykonuje ruch
obrotowy , a drugi posuwisto — zwrotny . Również mechanizmy
zębatkowe są często nazywane przekładniami zębatkowymi . Świadczy
to o dokonującej się zmianie zakresu pojęciowego terminu przekładni ,
który w nowym , szerszym znaczeniu można by określić w sposób
następujący :
przekładnia — mechanizm przenoszący ruch między dwoma członami o
ruchu obrotowym , posuwisto — zwrotnym lub obrotowym i
posuwisto — zwrotnym , najczęściej ze zmianą prędkości i działających
sił i momentów .
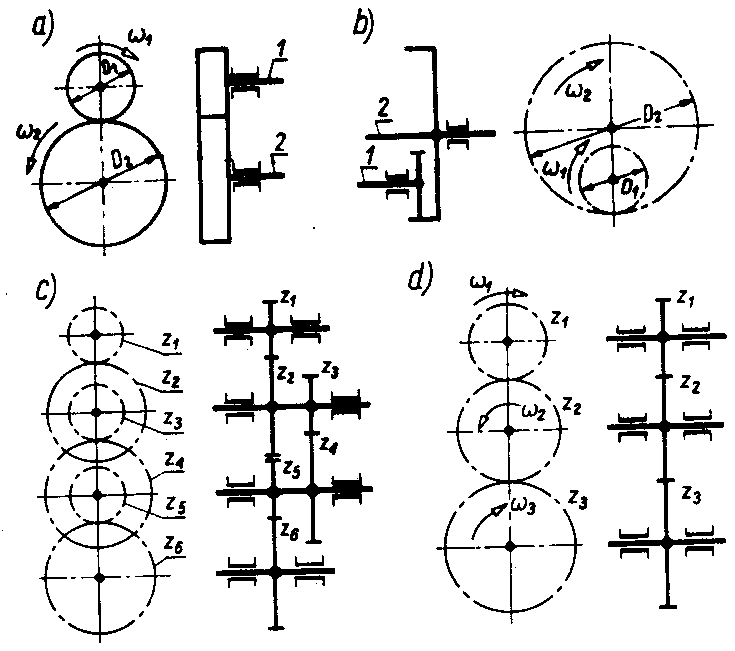
Przekładnia—przełożenie — stosunek „ i ” prędkości kątowej „ ”
wału napędzającego 1 przekładni do prędkości kątowej „ ” wału
napędzanego 2 ( rys. a )
gdzie:
n1 , n2— prędkości obrotowe wałów 1 i 2 .
Stosunek ten przyjmuje się za dodatni , gdy obie prędkości kątowe
mają ten sam kierunek (a więc np. w przekładni zębatej wewnętrznej na
rys. b lub przekładni zębatej zewnętrznej na rys. d) , za ujemny zaś —
gdy kierunki prędkości są przeciwne (rys. a , c) . W praktyce , w przypadku
przekładni , w której można bez trudności określić kierunku obrotu wału
napędzanego w stosunku do napędzającego , zwykle pomija się znak minus
gdy kierunki obrotu wałów są przeciwne .
Przekładnia , dla której i >1 , nazywa się przekładnią redukcyjną
(zwalniającą) , a przekładnia , dla której i <1 , nazywa się przekładnią
multiplikacyjną (przyspieszającą) .
Dla przekładni ciernych (rys. a) i ciągnowych , bez uwzględnienia
ewentualnego poślizgu
a dla przekładni zębatych (rys. b) i łańcuchowych ponadto
gdzie:
MS1 , MS2— momenty skręcające ,
z1 , z2— liczba zębów kół (zębatych lub łańcuchoych) ; w przypadku
przekładani ślimakowej z1 jest krotnością zwojów ślimaka .
Przełożenie przekładni wielokrotnej jest równe iloczynowi
przełożeń przekładni składowych (prostych — składających się z dwóch
kół); np. dla przekładni zębatej wielokrotnej pokazanej na rys. c
natomiast dla przekładni zębatej pojedyńczej rys. d
czyli koło pośrednie nie wpływa na przełożenie przekładni , a tylko
zmienia kierunek obrotu koła napędzanego .
W niektórych działach budowy maszyn , np. w obrabiarkach
skrawających do metali , za przełożenie przekładni uważany jest
stosunek „ i ” prędkości kątowej „ ω2 ” wału napędzanego 2 do
prędkości „ ω1 ” wału napędzającego 1
Wartości liczbowe przełożenia przekładni obliczone ze wzoru [5]
są odwrotnościami przełożenia przekładni obliczone ze wzorów [1] do [4]:
gdy np. przełożenia przekładni z [1] wynosi 50:1 , to obliczone z [5] 1:50
Niektórzy autorzy nazywają stosunek prędkości wałów
przełożeniem przekładni kinematycznym (ruchowym) , a stosunek średnic
kół lub liczb zębów
przełożeniem przekładni geometrycznym .
Przekładnia zębata — przekładnia mechaniczna , w której ruch
obrotowy jest przenoszony z jednego wału na drugi na skutek zazębiania
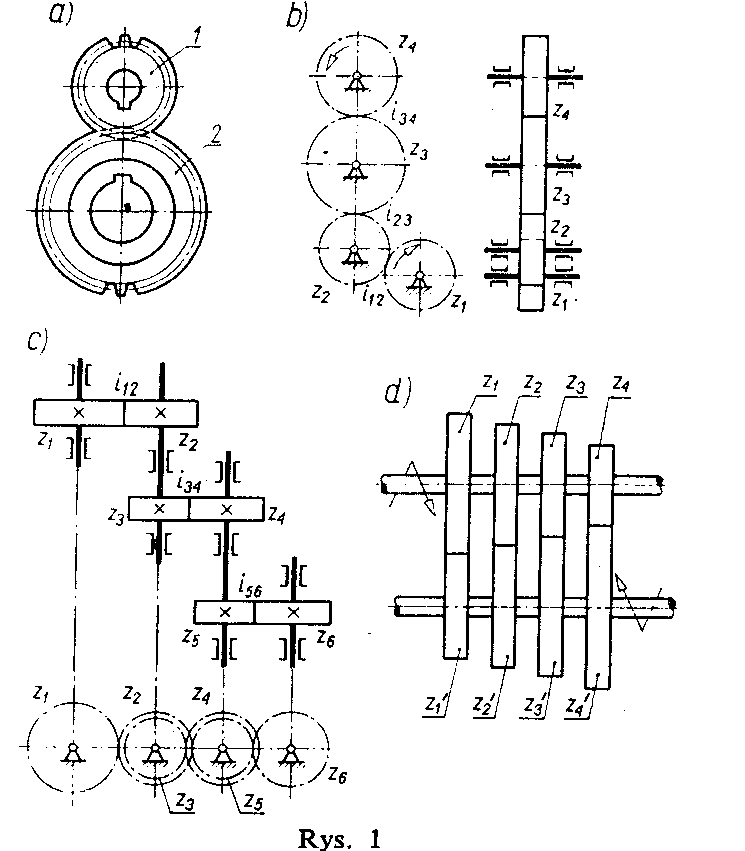
się koła zębatego napędzającego 1 z napędzanym 2 (rys. 1a) .
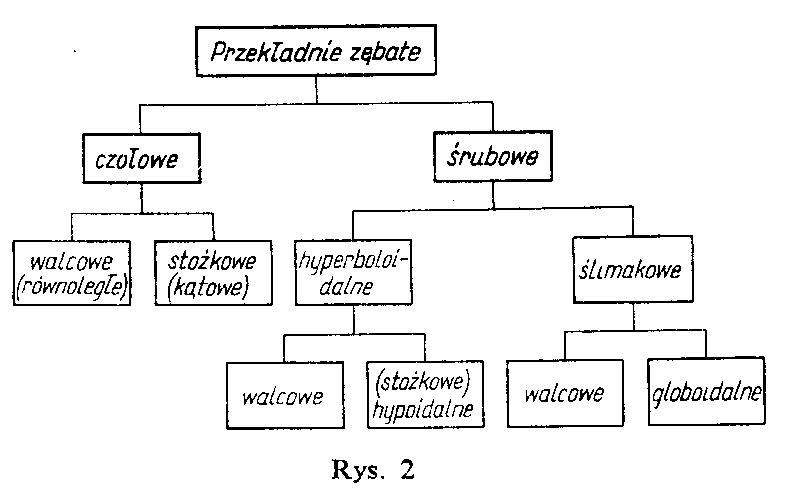
Ze względu na charakter zazębienia przekładnie zębatą dzieli się
(rys. 2) na czołowe i śrubowe (wichrowate) .
W zależności od tego , czy przekładnia zębata jest utworzona z kół
zębatych walcowych , czy stożkowych , rozróżnia się przekładnie zębate
walcowe i stożkowe . Przekładnia zębata walcowa może być ponadto
zewnętrzna lub wewnętrzna .
W zależności od wzajemnego położenia osi kół rozróżnia się
przekładnie zębate równoległe , kątowe i wichrowate .
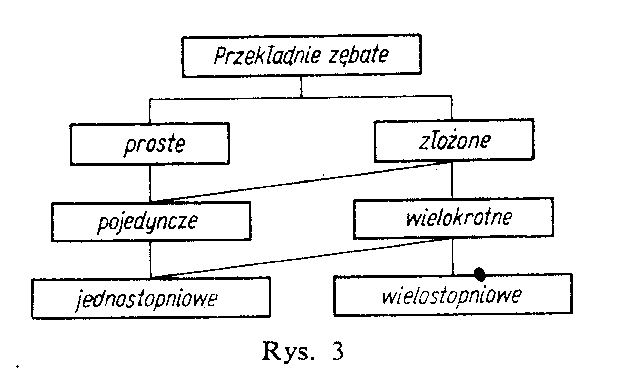
W zależności od liczby kół i ich rozmieszczenia na wałach
przekładnia zębata może być prosta lub złożona , pojedyńcza lub
wielokrotna i jednostopniowa lub wielostopniowa (rys. 3) .
Przekładnia zębata jest prosta gdy sklada się tylko z dwóch kół
(rys. 1a) , a złożona — gdy składa się z większej liczby kół (rys. 1b—1d) .
Przekładnia zębata jest pojedyncza , gdy przełożenie jej
(rys. 1b) jest stałe i równe przełożeniu między skrajnymi kołami .
Warunek ten spełniają oczywiście przekładnie zębate proste (rys. 1a)
oraz takie przekładnie zębate złożone , w których na każdym wale
osadzone jest jedno koło jak na rys. 1b , gdzie ani liczba kół pośradnich ,
ani liczba ich zębów nie mają wpływu na przełożenie przekładni .
Przekładnie zębate złożone pojedyncze stosuje się głównie
w celu uzyskania odpowiedniego kierunku obrotu wału napędzanego
lub rozstawienia osi skrajnych wałów .
Przekładnia zębata jest wielokrotna , gdy przełożenie jej
(rys. 1c) jest iloczynem przełożeń pomiędzy poszczególnymi parami
kół . Warunek ten spełniają przekładnie zębate złożone , w których na
wałach pośrednich osadzone są po dwa koła . Przekładnie takie stosuje
się gdy żądanego przełożenia nie można lub trudno uzyskać w
przekładni zębatej prostej .
Przekładnia zębata jest jednostopniowa , gdy przełożenie jej
Jest stałe (rys. 1a—c) , wielostopniowa zaś — gdy między wałem
napędzającym i napędzanym można uzyskać więcej niż jedno przełożenie ,
jak np. na rys. 1d , gdzie przez sprzęganie poszczególnych par kół nożna
uzyskać 4 różne przełożenia . Przekładnie zębate wielostopniowe
stosowane są powszechnie w skrzynkach przekładniowych różnych
maszyn roboczych (np. w obrabiarkach skrawających) w samochodowych
skrzynkach biegów itp.
Poza tym , w zależności od tego czy osie wszystkich kół przekładni
zębatej nie zmieniają wzajemnego położenia , czy też niektóre z nich
obracają się względem innych , przekładnie zębate dzieli się na stałe i
obiegowe .
Przekładnia zębata , luzy - w przekładniach zębatych występują :
luz międzyzębny - odległość między nie stykającymi się bokami zębów
współpracujących kół zebatych , mierzona wzdłuż linii przyporu ;
odległość ta może być również mierzona na okręgu koła tocznego i
wówczas nazywa się luzem obwodowym , którego wartość wynosi zwykle
od 0,03 do 0,07 modułu nominalnego
luz wierzchołkowy - odległość pomiędzy wierzchołkami zęba jednego
koła i dnem wrębu drugiego ; wartość tego luzu wynosi zwykle 0,1 do 0,3
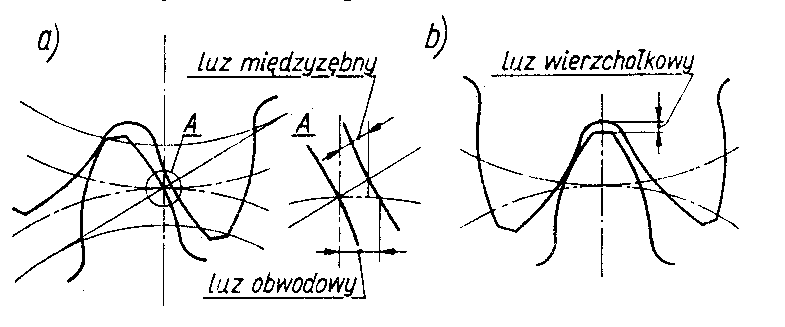
modułu nominalnego
Przekładnia zębata bezluzowa - przekładnia zębata , w której
nie występuje luz między współpracującymi zębami , dzięki czemu
eliminuje się jałowy ruch elementu napędzającego przekładni i uzyskuje
zwiększenie dokładności przesuwu przy zmianie kierunku ruchu .
Jednum ze stosowanych rozwiązań konstrukcyjnych przekładni zębatej
bezluzowej jest koło dzielone 1 rozpierane sprężynami 2 (rys.) .
Spręzyny rozpierając obie części koła , dociskają ich zęby do
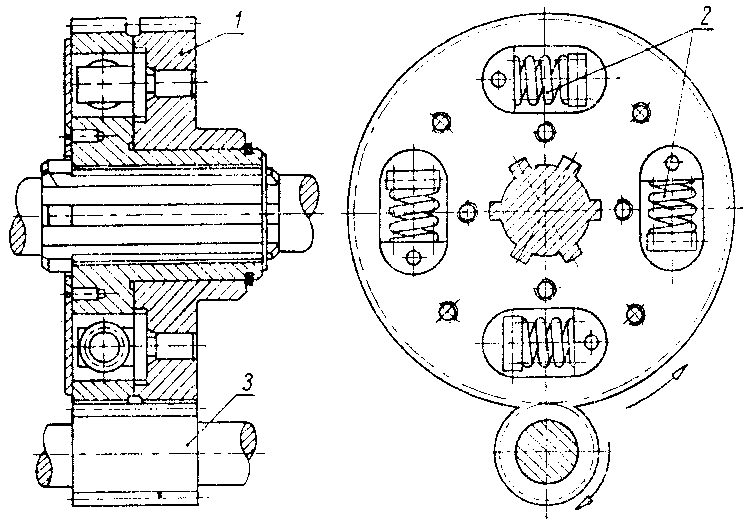
przeciwległych boków koła jelitebo 3 usuwając luz międzyzębny .
Przkładnie nawrotna - nawrotnica ; przekładnia mechaniczna
umożliwiająca zmianę kierunku ruchu członu napędzającego . Zmiany
kierunku ruchu uzyskuje się przez włączenie różnych części przekładni ,
to znaczy przenoszenie ruchu różnymi drogami .
W przekładniach nawrotnych zębatych włączenie części przekładni
może się odbywać np. za pomocą sprzęgieł 1 i 2 , jak na rys. 1b
(przeniesienie ruchu z wału I na wał II przez koła z1 i z2 lub z3,z4 i z5) ,
za pomocą kół przesuwnych , jak na rys. 1c (przeniesienie ruchu przez
koła z1 do z5 lub z6 do z9) , przez użycie dźwigni ręcznej (przekładnia
nawrotna odchylna - rys. 1d) , za pomocą sprzęgieł 1 lub 2 i kół
stożkowych , jak na rys. 1e (przeniesienie ruchu przez koła z1 i z2 lub
z3 , z4 , z5 , z1 i z2) , przez unieruchomienie różnych kół przekładni
obiegowych i tym podobne .
Przekładnia obiegowa - przekładnia planetarna ; przekładnia
zębata lub cierna , w której co najmniej jedno z kół , zwane kołem
obiegowym lub satelitą 2 (rys. 1a) jest ułożyskowane w obrotowym
jarzmie J , tak że może toczyć się po kołach centralnych 1 i 3
(zwanych słonecznymi lub głównymi) o osiach stałych .
Liczba satelitów wynosi zwykle od kilku do kilkunastu
(na rys. 1a - trzy) , dzięki czemu przekładnia może przenosić duże
obciążenie .
W przekładni obiegowej jedno z kół centralnych jest nieruchme
(na rys. 1a koło 3 o uzębieniu wewnętrznym) , wobec czego jej stopień ruchliwości jest równy jedności . Przekładnie obiegowe mogą być równoległe (złożone z kół stożkowych - rys. 1b) . Przekładnie te umożliwiają osiągnięcie dużych przełożeń przy małej liczbie kół
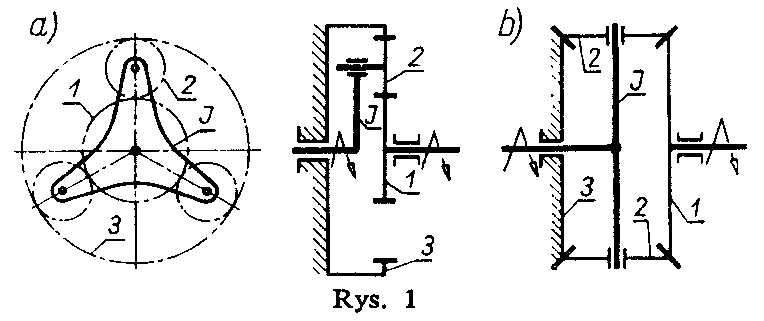
zębatych i zwartej budowie .
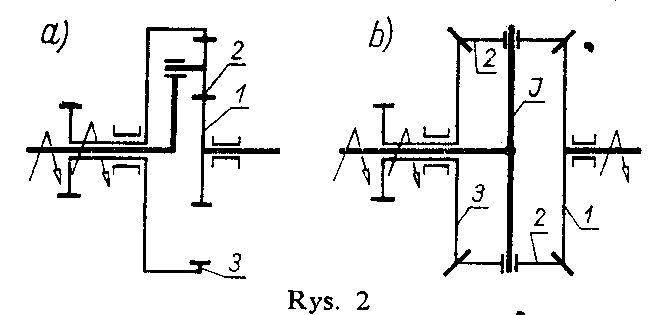
Do przekładni obiegowych są zaliczane tak zwane mechanizmy
(przekładnie) różnicowe (sumujące) , w których oba koła centralne
1 i 3 (rys. 2) są ruchome . Są to , ogólnie biorąc , łańcuchy kinematyczne ,
których stopień ruchliwości jest równy dwóm . W przypadku gdy dwa
człony tego łańcucha są napędzające , a jeden napędzany , ruch tego ostatniego jest ściśle określony i łańcuch kinematyczny jest mechanizmem
(przekładnią różnicową) . Gdy zaś tylko jeden z członów jest napędzający ,
a dwa napędzane - ruchy ich nie są jednoznacznie określone ; ruchy te mogą się stać określone (a łańcuch kinematyczny może stać się przekładnią różnicową) dopiero po takim dodatkowym powiązaniu członów napędzanych (np. za pomocą stałej przekładni) , że stopień ruchliwości całego łańcucha kinematycznego będzie równy jedności . Przekładnie różnicowe umożliwiają składanie ruchów obrotowych i uzyskiwanie bezstopniowej zmiany przełożenia .
Istnieje bardzo wiele typów i odmian przekładni obiegowych
zwyklych (nazywanych niekiedy planetarnymi) i różnicowych . Na rys. 3
pokazano przekładnię różnicową zębatą , stosowaną w samochodach
(nazywaną dyferencjałem) . W przekładni tej członem wiążącym dodatkowo koła jezdne osadzone na półosiach 4 jest nawierzchnia jezdni .
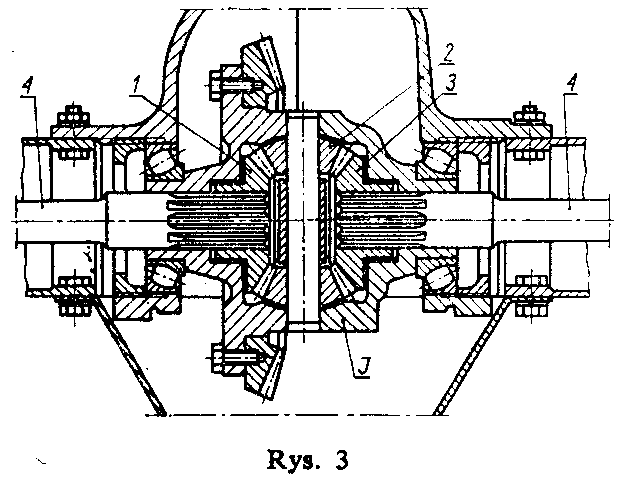
Na rys. 3 oznaczono : 1i 3 - koła centralne , 2 - satelity , J - jarzmo .
Przekładnie obiegowe są stosowane w obrabiarkach skrawających ,
dźwignicach , maszynach górniczych i innych oraz w pojazdach mechanicznych .
Wyszukiwarka
Podobne podstrony:
Prezentacja praca dyplom
Praca dyplomowa Strona tytułowa etc
PRACA DYPLOMOWA BHP - ORGANIZACJA PRACY W PSP, TEMATY PRAC DYPLOMOWYCH Z BHP
praca dyplomowa 1 strona wzor, Szkoła, prywatne, Podstawy informatyki
d druku BIBLIOGRAFI1, cykl VII artererapia, Karolina Sierka (praca dyplomowa; terapia pedagogiczna z
Praca dyplomowa(1)
streszczenie panelu, Prace dyplomowe i magisterskie, praca dyplomowa, materiały z internetu
praca dyplomowa BR5VQ5NYN263L77S7YKAVS66LCHECBHKF2E3GEQ
praca dyplomowa informatyka programowanie 7B5PTOE5KXERFXSEJISGCMFJDQ5X6LRRZEBNOJY
praca dyplomowa
praca dyplomowa edycja wbn1 2011
PRACA DYPLOMOWA MAGISTERSKA OCZ SC TYPU LEMMNA
Internet - UE prawo, Studia - IŚ - materiały, Semestr 07, Praca dyplomowa
do druku ROZDZIAŁ III, cykl VII artererapia, Karolina Sierka (praca dyplomowa; terapia pedagogiczna
PRACA DYPLOMOWA SPIS TREŚCI, TEMATY PRAC DYPLOMOWYCH Z BHP
strona tytulowa, WNPiD, moje, praca dyplomowa
inżynierska praca dyplomowa wzorzec
Wytwarzanie biogazu - wysypisak śmieci., Studia - IŚ - materiały, Semestr 07, Praca dyplomowa
więcej podobnych podstron