Jarosław Śnitko
Daniel Gorzkowski
Grupa I
Instrukcja obsługi
robota przemysłowego
IRp-6 / IRb-6
21 kwietnia 2008, Warszawa
Spis treści:
Wstęp
Budowa i elementy robota
Przepisy BHP
Uruchomienie robota
Sterowanie
Synchronizacja
Programowanie
Realizacja programu
Wyłączanie robota
1. Wstęp:
Nazwa robota przemysłowego IRb-6 bierze się być może od jakiegoś angielskiego skrótu, zapewne Industrial Robot b-6, ale gdy ten osobnik przesiedlił się z malowniczych terenów Szwecji na tereny ziem polskich, zmienił ostatnią literkę na „ p” i zapewne stąd powstała nazwa IRp-6.
Robot IRp-6 nie jest może najnowszym osiągnięciem techniki, bo powstał jakby nie patrzeć w XX wieku, ale jest za to bardzo dobrym przykładem całego procesu programowania i wykonywania zadanych parametrów dla robota przemysłowego. Jest on w naszym laboratorium już dosyć długo i na razie bez większych problemów, czasem pracuje.
2. Budowa i elementy robota:
Robot:
Robot IRp-6 składa się z części manipulacyjnej i szafy sterowniczej. Oba te elementy są usadowione na dodatkowych nóżkach, które musiały zostać dodatkowo zamontowane, a spowodowane to było jednym z żywiołów często nawiedzającym naszą salę laboratoryjną (woda). Oprócz tego do całego zestawu jest jeszcze pełno końcówek do kiści które opcjonalnie można zamontować (w naszym przypadku, śruba).
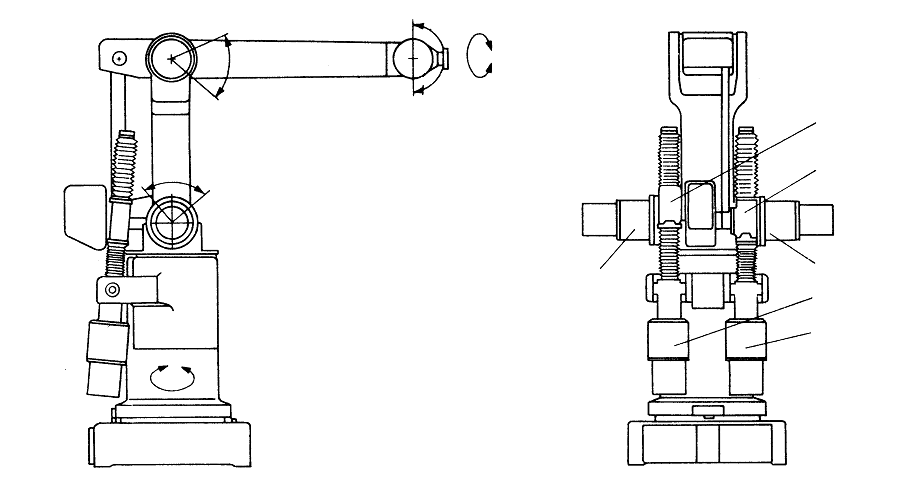
Sam robot IRp-6 wygląda następująco:
Tak wygląda on mniej więcej na żywo:
Posiada on 5 stopni swobody:
Korpus:
Pierwszy stopień - przekładnia falowa pomiędzy podstawą a korpusem robota, umożliwia obrót prawie o 360º.
Drugi stopień - pomiędzy kolumną a pierwszym ramieniem. Pozioma oś obrotu. Silnik prądu stałego napędza śrubę toczną, która powoduje przesuwanie nakrętki na końcu ramienia, tworząc układ równoległowodowy.
Trzeci stopień - pomiędzy drugim a trzecim członem. Również pozioma oś obrotu, napędzana również układem równoległowodowym. Trzeci stopień swobody zachowuje stałą orientację przy zatrzymanym silniku nawet kiedy poruszamy drugim stopniem swobody.
Kiść:
Czwarty stopień - samohamowny. Pozioma oś obrotu. Zachowuje stałą orientację podczas ruchu pierwszego i drugiego stopnia swobody. Jest zawsze pod stałym kątem. Napęd jest realizowany również silnikiem prądu stałego, poprzez dwie pary popychaczy a następnie na samym końcu układu, ruch jest przetwarzany na ruch obrotowy kiści.
Piąty stopień - ruch obrotowy o osi obrotu prostopadłej do czwartego stopnia swobody w zależności jak jest ustawiony ów czwarty stopień. Napęd taki sam jak w stopniu czwartym, czyli przez dwie pary popychaczy i zamieniane na ruch obrotowy.
Śruby toczne w robocie są osłonięte mieszkami z jagnięcej skóry dlatego wytrzymały tyle czasu i nie popękały do tej pory.
Szafa:
Wygląda przeważnie tak:
Składa się z części przedniej - napięciowej i części tylnej - układ sterowania. Zasilana jest napięciem trójfazowym 380 V. W środku niej napięcie buszuje, zatem nie możemy pracować przy otwartej szafie! Jeśli już musimy otworzyć szafę, musimy bezwzględnie wyłączyć bezpiecznik sieci zasilającej szafę i sprawdzić czy przypadkiem sieć jest odłączona. Jeśli już otworzymy szafę, uprzednio odłączając napięcie, to możemy w środku podziwiać pełno wiązek kabli, 3 kondensatory za ścianką plexi (uwaga! naładowane, zatem nie dotykamy!), 5 kaset sterujących stopniami swobody, każdy z czerwonym przyciskiem „Reset”, na dole pełno płytek tworzących komputer w stylu lat 70-80tych, 4 transformatory rozłożone symetrycznie po obu stronach szafy dla lepszego rozkładu ciężaru i polityki cieplnej całej szafy.
Jeśli zaś chodzi o politykę cieplną, to szafa posiada 6 wentylatorów które wprowadzają gorące powietrze ze środka szafy do przestrzeni pomiędzy podwójnymi ścianami i ciepło to jest odprowadzane przez zewnętrzną obudowę do otoczenia. Poza tym cała szafa jest uszczelniona i w żaden możliwy sposób, gdy szafa jest zamknięta, nie dostaje się do jej wnętrza kurz i pył z hali produkcyjnej (no chyba że szafa jest importowana ze „wschodu”, więc może posiadać wiele modyfikacji, np. otwory w zewnętrznej obudowie, które co prawda poprawiają wentylację szafy, ale przemieniają naszą upragnioną szafę w wielki odkurzacz przemysłowy).
Na ścianie przedniej mamy pełno przycisków, półkę na „przenośny” panel sterowania, „stacyjkę” z kluczykami, kieszeń na kasetę zapisu cyfrowego oraz czerwony przycisk awaryjnego zatrzymania robota.
3. Przepisy BHP:
Nie uruchamiać robota bez pisemnej lub słownej zgody prowadzącego laboratorium!
Uruchomić robota można tylko w obecności prowadzącego laboratorium.
Szafa sterownicza musi być zamknięta!
Uczestnicy laboratorium, odrabiający ćwiczenie muszą być ubrani schludnie i w ubrania ściśle przylegające do ciała. Wszystkie luźne szaliki, krawaty itp. powinny być zdjęte, ewentualnie pozbawione wszystkich stopni swobody!
Nie należy umieszczać kończyn i innych części ciała w przestrzeniach wolnych robota, gdyż grozi to amputacją lub śmiercią uczestnika.
Nie należy umieszczać końcówek palców w gniazdkach napięcia 230 i 380 V.
Należy szanować i delikatnie traktować całego robota IRp-6, gdyż często się denerwuje i może odmówić współpracy z operatorem.
Ponieważ robot IRp-6 jest dzikim zwierzęciem, to nie należy przebywać w jego zasięgu bądź jego okolicach, zarówno w czasie operowania joystickiem jak i już wykonywania zadanego programu.
Jeśli już zachodzi potrzeba zbliżenia się do robota, to należy bezwzględnie trzymać jedną rękę na górnym ramieniu robota tak, aby jakakolwiek reakcja na nieprzewidziany ruch robota była możliwie jak najszybsza.
4. Uruchamianie robota:
Pierwszym krokiem przed uruchomieniem robota jest sprawdzenie czy robot porusza się we wszystkich swoich stopniach swobody (nie jest jakoś zablokowany) i czy nie ma jakiś wycieków lub podejrzanych substancji na robocie. Jeżeli wszystko jest w porządku przechodzimy do załączenia bezpieczników w skrzynce bezpiecznikowej, by podać napięcie na gniazdo do którego podłączony jest robot. Następnie na panelu szafy sterującej wciskamy i przekręcamy kluczyk (kluczyk daje się wcisnąć tylko w jednej pozycji, zatem musimy wykonać kilka ruchów). Po przekręceniu kluczyk się blokuje w odpowiedniej pozycji. Zaświecają się kontrolki na panelu przednim szafy sterującej. Na panelu kontrolnym znajdują przyciski i lampki. Dwa podstawowe przyciski (oprócz przycisku bezpieczeństwa wyłączającego robota) to przyciski 0 i I. Najpierw wciskamy przycisk 0. Odpowiada on za włączenie odwodów sterujących. Po wciśnięciu włącza się elektronika i „przenośny” panel sterujący. Szafa zaczyna pracować już jako urządzenie liczące ale sam robot jeszcze nie pracuje, nie ma podanych napięć na silniki. Po wciśnięciu przycisku I szafa zaczyna dopiero podawać napięcie na silniki. Jednak przed wciśnięciem I należy odczekać aż przestanie migać czerwona kontrolka (sygnalizacja błędów) poniżej kluczyka lub skasować jej błąd czerwonym przyciskiem. W przeciwnym wypadku silniki nie wystartują. Silniki startują, zatem robotem nie da już się poruszyć ciągnąc za jego którąś część, jedynie można go przesunąć joystickiem.
5. Sterowanie:
Sterować robotem możemy poprzez „przenośny” panel sterujący. Posiada on ekran, przyciski funkcyjne, joystick, podkładkę pod nadgarstek z czujnikiem nacisku oraz przycisk awaryjnego zatrzymania robota. Aby opanować robota, poruszamy joystickiem w górę, w dół, w prawo i w lewo oraz obracając gałkę joysticka. Przy joysticku są umieszczone dwa przełączniki, z czego jeden z nich oznaczony cyframi 1 i 2 służy do przełączania funkcji joysticka poruszania poszczególnymi stopniami swobody. A tak mniej skomplikowanie, to chodzi o to że jeżeli ten przełącznik jest ustawiony w pozycji 1, to joystickiem możemy sterować stopniami swobody od 1 do 3 a jeśli ustawimy ów przełącznik w pozycji 2 to poruszamy stopniami 4 i 5 czyli samą kiścią robota.
Możemy również sterować robotem poprzez guziki na przedniej stronie szafy sterującej oraz poprzez program napisany na taśmie zapisu cyfrowego (ale nie jest to tak ciekawe).
6. Synchronizacja:
Po uruchomieniu szafy, miga na czerwony przycisk u góry którego narysowana jest strzałka z kropką. Oznacza on że robot nie jest zsynchronizowany i nie ma pojęcia gdzie się znajduje. Należy więc sprawdzić w jakim położeniu są strzałki umieszczone na obudowach poszczególnych stopni swobody i w razie czego tak skorygować położenie wszystkich stopni joystickiem tak, aby strzałka wskazywała kierunek poruszania się kreski na jednym elemencie do kreski drugim elemencie. Po ustawieniu wszystkich stopni, wciskamy czerwony przycisk. Gdy prawidłowo wykonamy całą synchronizację, to ekran panelu sterującego nie wykaże nam żadnego błędu (w innym przypadku wyświetla się błąd nr 8) a migająca lampka powinna się wyłączyć. W ten oto sposób mamy zsynchronizowanego robota który wie w jakim położeniu się znajduje.
7. Programowanie:
Po zsynchronizowaniu robota możemy przystąpić do programowania. W programowaniu korzystamy z zasady numerowania wierszy. Na początku numeruje się co 10 wiersz z późniejszą możliwością dodawania wierszy między tymi „dziesiątkami.” Do programowania posługujemy się „przenośnym” panelem sterującym.
Aby wejść w tryb programowania robota naciskamy przycisk „f”. Jesteśmy w trybie zmiany parametrów. Na początku mamy dwa obowiązkowe kroki. W pierwszym kroku wprowadzamy narzędzie (jego numer, w naszym przypadku 1) i akceptujemy wprowadzone zmiany, a w kroku drugim prędkość. W tym kroku wpisujemy wartość prędkości w mm/s. W naszym przypadku jest to 500 mm/s. Jest jeszcze druga wartość nazwana prędkością maksymalną. Jeżeli z obliczeń ruchu wyjdzie prędkość większa od maksymalnej to robot awaryjnie się zatrzyma. Prędkość tą ustawiamy na 1000 mm/s. Następnie akceptujemy zmiany wprowadzone w tym kroku. Prędkość tą możemy również kontrolować przez podanie, na ile procent prędkości wprowadzonej robot ma się ruszać. Następnie należy 4 i 5 stopień swobody doprowadzić do pozycji roboczej by uniknąć problemów przy programowaniu.
Po tych krokach możemy zająć się konkretnym programowaniem, w którego tryb wchodzimy przyciskiem z symbolem strzałki w kierunku punktu. Pojawia się 30 wiersz (10 zajęty przez narzędzie, 20 przez prędkość). Program pamięta że 30 jest między obecną konfiguracją a taką na jaką robota odprowadzimy na koniec. W tym kroku mamy do wyboru 4 rodzaje ruchu: liniowy, ortogonalny, quasi-liniowy (liniowy w każdym stopniu z osobna) i kołowy. Wybieramy quasi-liniowy, gdyż jest on najbezpieczniejszy i najmniej awaryjny z doświadczenia poprzednich laboratoriów. Kolejny krok w 40 wierszu to czas - prędkość. Zadajemy tutaj czas i prędkość do wykonania powierzonego zadania. Następnie dostajemy pytanie czy ruch ma się odbywać z dokładnością zgrubną czy dokładną. Dla toru dojazdu wybieramy zgrubną, a dla wykonywania zadania dokładną. Następny krok to wybór czy współrzędne końca to współrzędne względne czy bezwzględne. Jeśli wybierzemy współrzędne bezwzględne, to jego każdy ruch zostanie określony względem ściany, podłogi, kwiatka czy jakiegoś zupełnie innego obiektu i jakakolwiek ingerencja w poprzednie położenie robota nie zmieni nam położenia końcówki robota w następnym kroku. W przypadku współrzędnych względnych, każdy krok następny jest nadpisywany zmianą położenia względem położenia końcówki w poprzednim kroku, zatem jakakolwiek ewentualna zmiana wewnątrz programu popsuje nam wszystkie dalsze położenia. Potem wykonujemy końcowy ruch robota joystickiem i jak już dojdziemy do naszego końcowego, upragnionego celu, to akceptujemy go. Robot zapamiętał że ruch 30 jest zaprogramowany.
Jest przygotowany do wykonania ruchu 40. Możemy wykonać kolejne przemieszczenie i akceptujemy. Następnie pojawia się pytanie „powielić czy nowe ?”. Chodzi w tym miejscu o to czy mają pozostać dotychczasowe ustawienia w sprawie toru ruchu, prędkości poruszania, zgrubnie czy dokładnie i przy współrzędnych względnych czy bezwzględnych. Jeśli odpowiedzi na wszystkie te pytania są identyczne, to wciskamy „powiel”. Możemy również nadać nowe prędkości i tory ruchu poprzez wciśnięcie „nowe”. Akceptujemy go ponownie i robimy wszystko w pętli tyle razy ile jest nam potrzebne do wykonania całego zadania.
Dobrze jest ostatnim kroku odprowadzić robota w pobliże kroku początkowego. Przechodzimy w tryb realizacji programu.
„Przenośny” panel sterowania wygląda następująco:
8. Realizacja programu:
Aby zrealizować program wciskamy zielony przycisk z cyfrą 1 otoczoną strzałkami. Mamy możliwość dalszej konfiguracji programu, m.in. możemy zmienić prędkość całego zadania. Oprócz tego robot może jeszcze wykonać „Krok”, czyli po kolei wykonać kolejne wiersze programowania, oraz „Start” czyli rozpocząć cały zaprogramowany uprzednio ruch. Robot powinien po wszystkich zmianach i akceptacji wykonać swoje zadanie prawidłowo i bez problemów.
9. Wyłączenie robota:
Robota można wyłączyć poprzez naciśniecie czerwonych guzików i stop awaryjny lub poprzez naciśniecie zera (wcześniej należy jednak robota odprowadzić tak, żeby nie opadł grawitacyjnie za mocno na zderzaki) i przekręcenie kluczyka. Robi się cisza, odkładamy panel sterowania i kończymy pracę z robotem.
1
2
3
4
5
Nakrętka pierwszego ramienia
Nakrętka drugiego ramienia
Silnik napędzający trzeci stopień swobody
Silnik napędzający drugi stopień swobody
Silnik napędzający piąty stopień swobody
Silnik napędzający czwarty stopień swobody
Przekładnia falowa napędzająca pierwszy stopień swobody
Robot IRp-6
Cześć przednia, napięciowa
Cześć tylna, układ sterowania
„Przenośny” panel sterowania
Pełno przycisków
Czerwony przycisk awaryjnego zatrzymania robota
Kluczyki ze stacyjką
Kieszeń z kasetą zapisu cyfrowego
Zielony przycisk realizacji
Przełącznik 1-2
Joystick
Przycisk „f”
Podkładka z czujnikiem nacisku
Czerwony przycisk awaryjnego zatrzymania robota
Ekran panelu
Przycisk strzałki w kierunku punktu
Przyciski funkcyjne
Wyszukiwarka
Podobne podstrony:
Instrukcja obsługi Robota IRP 6
Podstawy Robortyki II Instrukcja obsługi Robota IRP 6
Podstawy Robortyki II, Instrukcja obsługi Robota IRP 6
kip irp
wykład 6 instrukcje i informacje zwrotne
Instrumenty rynku kapitałowego VIII
05 Instrukcje warunkoweid 5533 ppt
Instrukcja Konwojowa
2 Instrumenty marketingu mix
Promocja jako instrument marketingowy 1
Promocja jako instrument marketingowy
Instrukcja do zad proj 13 Uklad sterowania schodow ruchom
więcej podobnych podstron