AGH Wydział EAIiE Zakład Metrologii |
|
|||
LABORATORIUM PODSTAW MIERNICTWA |
Semestr 4 |
|||
Rok akademicki 1998/99 |
Rok studiów II |
Grupa studencka 2 |
||
Kierunek : Elektrotechnika |
Zespół : F |
|||
Temat ćwiczenia Pomiar wielkości nieelektrycznych |
Numer ćwiczenia 6 |
|||
Data wykonania: 12.05.1999 Data poprawy: |
|
|||
I Program ćwiczenia:
Cyfrowy pomiar kąta obrotu za pomocą rastru w kodzie Gray'a - wyznaczanie błędów analogowych.
Pomiar położenia kątowego przy wykorzystaniu potencjometru o liniowej charakterystyce.
Analogowy tor pomiaru prędkości - tachoprądnica DC, tachoprądnica synchroniczna.
II Opracowanie wyników:
Cyfrowy pomiar kąta obrotu za pomocą rastru w kodzie Gray'a - wyznaczanie błędów analogowych.
Tarcza z kodem Gray'a jest przezroczystą tarczą, która ma na swoim brzegu naniesiony ośmiościeżkowy raster z kodem Gray'a. Linijka z 8 fotodetektorami odczytuje kątowe położenie tarczy. Wielożyłowy kabel łączy fotodetektory z zespołem diod świecących LED, które wskazują czy fotodetektor jest oświetlony, czy zaciemniony. Sygnał z fotodetektorów przez układ komparatorów podawany jest do dekodera kodu Gray'a, który steruje wyświetlaczem cyfrowym. Na obudowie tarczy zamontowana jest skala z podziałką kątową z zakresu od 0 do 30 stopni z rozdzielczością 1 stopnia. Na ruchomej tarczy z kodem Gray'a umieszczono podziałkę noniusza o zakresie od 0 do 1 stopnia umożliwiającą pomiar kąta z rozdzielczością 0,05 stopnia. Układ ten umożliwia pomiar przemieszczenia kątowego z dużą rozdzielczością.
W celu wyznaczenia błędów analogowych cyfrowego pomiaru kąta połączono wyjście z impulsatora układu z tarczą w kodzie Gray'a, z dekoderem Gray'a. Następnie obracając korbką tarczy odczytano wartość kąta ze skali kątowej z noniuszem dla kolejnych wartości zmierzonych cyfrowo i odczytywanych z wyświetlacza dekodera. Pomiary wykonano przy zwiększaniu i zmniejszaniu wartości kąta w zakresie od 0 do 15 stopni.
Tabela pomiarowa nr 1 :
Liczba stopni |
- |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
Kod Gray'a |
° |
1 |
3 |
3 |
4 |
6 |
7 |
7 |
8 |
9 |
11 |
12 |
12 |
Wykres zależności pomiaru za pomocą kodu Gray'a od wartości odczytanych na skali tarczy :
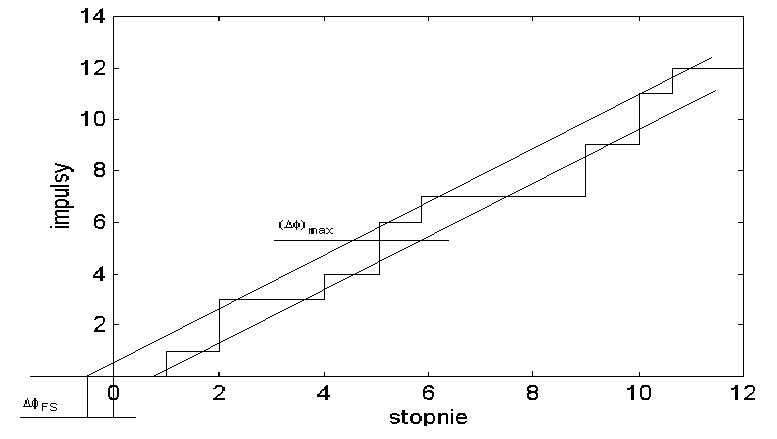
Tabela błędów :
Nieliniowość całkowa |
εc = 0,08 [°] = 8,3 [%] |
Nieliniowość różniczkowa |
εr = 0,08 [°] = 8.3 [%] |
Błąd wzmocnienia |
ΔφFS ≈ 0 [°] |
Błąd zera |
Δφ0 = 0,93 [°] |
Wzory obliczeniowe :
Nieliniowość całkowa :
Nieliniowość różniczkowa :
IV . Pomiar przesunięcia liniowego za pomocą indutoksynu oraz indukcyjnego różnicowego czujnika transformatorowego :
Tabela pomiarowa :
l[mm] |
-34,5 |
-29,5 |
-24,5 |
-19,5 |
-14,5 |
-9,5 |
-4,5 |
0 |
0,5 |
5,5 |
10,5 |
U[V] |
0,1516 |
0,1299 |
0,1079 |
0,0869 |
0,0645 |
0,0421 |
0,0199 |
0,0003 |
0,0016 |
0,0239 |
0,0457 |
l[mm] |
15,5 |
20,5 |
25,5 |
30,5 |
35,5 |
40,5 |
45,5 |
50,5 |
65,5 |
80,5 |
105,5 |
U[V] |
0,0687 |
0,0902 |
0,1119 |
0,1335 |
0,1559 |
0,1770 |
0,1978 |
0,2184 |
0,2798 |
0,3380 |
0,4199 |
Charakterystyka statyczna przetwornika :
Tabela błędów :
Nieliniowość całkowa |
εc = 0,045 [mm] = 4,5 [%] |
Błąd wzmocnienia |
ΔlFS = 0,05 [mm] |
Błąd zera |
Δl0 = 1,5[mm] |
Wzory obliczeniowe :
Nieliniowość całkowa :
VI . Wnioski :
Pomiar kąta obrotu dokonywaliśmy za pomocą rastru w kodzie Gray'a oraz impulsatorem . Impulsator ma dużo większą rozdzielczość (ok.10 razy większą) od rastru w kodzie Gray'a, a co za tym idzie i mniejszy błąd co potwierdzają wyniki pomiaru . Poza tym rastr w kodzie Gray'a wprowadza dość duży błąd zera .
Do pomiaru przesunięcia liniowego użyliśmy indukcyjny różniczkowy czujnik transformatorowy . Na podstawie tych pomiarów wnioskujemy , iż czujnik transformatorowy ma niewielki błąd nieliniowości , a zatem przyrząd ten jest dość dokładny .
4
Wyszukiwarka
Podobne podstrony:
10 Metody otrzymywania zwierzat transgenicznychid 10950 ppt
10 dźwigniaid 10541 ppt
wyklad 10 MNE
Kosci, kregoslup 28[1][1][1] 10 06 dla studentow
10 budowa i rozwój OUN
10 Hist BNid 10866 ppt
POKREWIEŃSTWO I INBRED 22 4 10
Prezentacja JMichalska PSP w obliczu zagrozen cywilizacyjn 10 2007
Mat 10 Ceramika
BLS 10
10 0 Reprezentacja Binarna
10 4id 10454 ppt
10 Reprezentacja liczb w systemie komputerowymid 11082 ppt
więcej podobnych podstron