Projekt
z
napędu maszyn elektrycznych
Wykonał:
Piotr Jasiński
IV ED
Zaprojektować rozrusznik do silnika :
Silnik indukcyjny trójfazowy (klatkowy): Sg 160L-4
Dane znamionowe:
PN=15 kW
NN=1460 obr/min
Prąd : 49,1 A (220 V); 28,5 A (380 V);
Sprawność : η=90%
Współcz. mocy: cosφ=0,89
IR/IN=7,6
MR/MN=2,3
MMAX/MN=2,7
Moment bezwł. J=0.074 kgm2
Masa m=126 kg
Stopień ochrony IP54
Jedną z metod rozruchu silnika klatkowego jest rozruch z zastosowaniem przełącznika gwiazda-trójkąt . Warunkiem rozruchu przy użyciu tej metody jest aby napięciem zasilania było równe napięciu znamionowemu dla połączenia w trójkąt.
Obliczenie całkowitego momentu bezwładności :
Jsilnika=GD2/4=0,074/4=0,0185 [kgm2]
Jspr=1 [kgm2]
J= Jsilnika+ Jspr= 1,074 [kgm2]
Poślizg znamionowy:
Moment znamionowy dobranego silnika wynosi:
Moment rozruchowy:
Moment krytyczny:
Poślizg krytyczny:
Aby obliczyć moment dynamiczny oraz chwilę przełączenia gwiazdy na trójkąt należy wykreślić charakterystyki mechaniczne.
Korzystając ze wzoru Klossa, możemy obliczyć punkty potrzebne do wykreślenia charakterystyk .
Przy połączeniu silnika w gwiazdę moment zmaleje w stosunku:
Charakterystykę wykreślam dla trzech charakterystycznych punktów:
S |
Ω |
Mtrójkąta |
Mgwiazdy = Mtrój. / 3 |
|
[ rad / sek] |
[ Nm ] |
[ Nm ] |
1 |
0 |
225,8 |
75,27 |
0,117 |
138,6 |
265 |
88,3 |
0 |
157,1 |
0 |
0 |
Aby określić moment dynamiczny podczas rozruchu dobieram moment obciążenia Mo narastający wraz ze wzrostem prędkości.
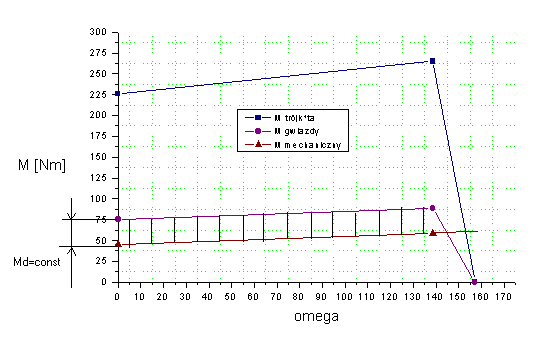
Przełączenie uzwojeń stojana z gwiazdy na trójkąt powinno nastąpić dla prędkości wyliczonej z odpowiedniej zależności:
Prędkość przełączenia można przyjąć:
ωp = 140[rad/s]
Mogę przyjąć moment dynamiczny podczas rozruchu :
= const
Mając moment dynamiczny mogę obliczyć czas, po którym należy silnik przełączyć z gwiazdy na trójkąt korzystając ze wzoru na czas rozruchu przy stałym momencie dynamicznym:
Moment dynamiczny podczas rozruchu
Więc uzwojenia stojana należy przełączyć z gwiazdy na trójkąt po czasie pięciu sekund od momentu załączenia silnika do sieci. Czynność tą można zrealizować za pomocą załącznika czasowego o zwłoce 5 [s].
Układ sterowania zaprojektowałem na podstawie skryptu „Napęd elektryczny i automatyka napędu”.
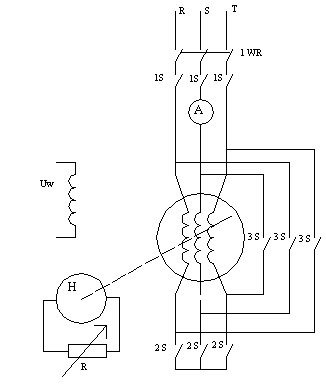
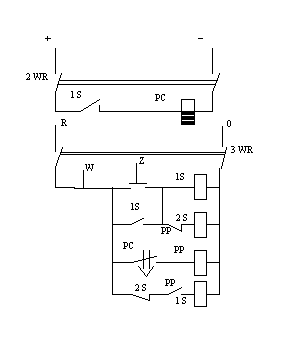
Rozruch silnika następuje po zamknięciu wszystkich trzech wyłączników ręcznych 1WR, 2WR, 3WR oraz przyciśnięciu przycisku „Z”.
Działa wtedy stycznik 1S i 2S, co powoduje połączenie uzwojeń stojana w gwiazdę. Styk pomocniczy stycznika 1S uruchamia przekaźnik zwłoczny PC. Po upływie czasu opóźnienia nastawionego na przekaźniku PC zamyka się jego stycznik w obwodzie cewki przekaźnika PP, co powoduje zadziałanie tego przekaźnika, przerwanie obwodu cewki stycznika 2S i jego zwolnienie. Bierny styk stycznika 2S zamyka obwód cewki stycznika 3S, powodując jego zadziałanie i połączenie uzwojeń stojana w trójkąt. Powoduje to wejście stycznika w charakterystykę naturalną.
Wyszukiwarka
Podobne podstrony:
janek
janek pedagogika porównawcza wykłady
janek i inni
Zeszyt Janek kolos 2 3
formy organizacyjno-prawne, janek
Meterologia Janek
opracowane pytania janek
O CZYM ZAPOMNIAŁ JANEK, zachowanie ucznia i dziecka
osiedle janek
Macerały węgiel brunatny Janek - Ściąga II, Studia, Petrologia węgla
JANEK - sciaga, JANEK
raporty Janek
Górnictwo Janek Ściąga, Studia, Górnictwo
Janek
Macerały węgiel brunatny Janek - Ściąga, Studia, Petrologia węgla
Gaudium Et Spes Janek
EGZAMIN PKM SCIAGA JANEK
więcej podobnych podstron