IMIĘ I NAZWISKO .............................................................. GRUPA .............
w kolumnie ODP. wpisać TAK lub NIE dla każdego przypadku
Punktacja: +2 - odpowiedź prawidłowa, 0 - brak odpowiedzi, -1 - odpowiedź błędna
NR |
PYTANIE |
ODP. |
PKT |
1 |
Czynnikami technicznymi, które umożliwiły rozwój robotyzacji były: |
|
|
|
wzrost kosztów pracy ludzkiej |
|
|
|
dążenie do zapewnienia jednolitego wysokiego standardu wyrobów |
|
|
|
malejąca liczba kandydatów do pracy w uciążliwych i niebezpiecznych warunków |
|
|
|
postęp w konstrukcji elementów automatyki oraz systemów sterowania |
|
|
2 |
W skład zespołu ruchu robota wchodzą: |
|
|
|
układ napędowy, para kinematyczna i układ pomiarowy parametrów ruchu |
|
|
|
przemiennik energii, wzmacniacz oraz przekładnia ruchu |
|
|
|
źródło energii, przemiennik energii oraz wzmacniacz |
|
|
|
układ pomiarowy, układ sensoryczny i układ sterowania |
|
|
3 |
Układ pomiarowy parametrów ruchu robota: |
|
|
|
przekazuje sygnały ze środowiska do układu sterowania |
|
|
|
składa się z czujnika, przetwornika pośredniczącego i przekładni pomiarowej |
|
|
|
stosowany jest przy niezgodności wielkości mierzonej i wielkości wejściowej czujnika |
|
|
|
w zależności od charakteru informacji wyjściowych może być cyfrowy lubi analogowy |
|
|
4 |
Wymienić podstawowe problemy robotyzacji montażu |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
Pomocnicza przestrzeń robocza obejmuje: |
|
|
|
przestrzeń zabronioną przepisami lub normami BHP, |
|
|
|
przestrzeń w obrębie której przemieszcza się chwytak lub narzędzie |
|
|
|
przestrzeń roboczą i przestrzeń ruchów jałowych, |
|
|
|
przestrzeń w obrębie której przemieszczają się zespoły i znajdują się elementy robota |
|
|
6 |
Zaletami napędu pneumatycznego są: |
|
|
|
duża dokładność pozycjonowania, |
|
|
|
duża trwałość i niezawodność |
|
|
|
niska cena, |
|
|
|
mała masa przypadająca na jednostkę mocy, |
|
|
7 |
Układ ruchu manipulatora zawiera: |
|
|
|
łańcuch kinematyczny zawierający zespoły ruchu lokalnego, regionalnego i globalnego |
|
|
|
mechanizm kinematyczny z dołączonymi napędami |
|
|
|
pulpit sterowniczy i przenośny sterownik ręczny |
|
|
|
elementy nośne, prowadnice, elementy transmisji energii zasilania. |
|
|
8 |
Parę kinematyczną czwartej klasy: |
|
|
|
stanowi przegub kulisty, |
|
|
|
tworzy połączenie o trzech więzach i dwóch stopniach swobody, |
|
|
|
stanowi połączenie obrotowo-postępowe (np. płaszczyzna na płaszczyźnie), |
|
|
|
tworzy połączenie o dwóch ruchach postępowych i jednym obrotowym. |
|
|
9 |
Manipulator o strukturze { Y0 , A1 , B1 , Cm } |
|
|
|
ma sześć stopni swobody, |
|
|
|
ma ruchliwość równą pięć, |
|
|
|
ma manewrowość równą jeden, |
|
|
|
ma dwa ruchy postępowe i dwa ruchy obrotowe. |
|
|
10 |
Układy sterowania punktowego: |
|
|
|
realizują zadanie pozycjonowania, |
|
|
|
umożliwiają korekcję toru przemieszczeń, |
|
|
|
stosowane są w manipulatorach z napędem pneumatycznym, |
|
|
|
pozwalają modyfikować wartości zadane przemieszczeń, |
|
|
|
umożliwiają obsługę procesu spawania. |
|
|
11 |
Układ sensoryczny robota: |
|
|
|
składa się z przetwornika sensorycznego i układu elektronicznego, |
|
|
|
to czujnik do pomiaru parametrów ruchu robota, |
|
|
|
stosuje się w przypadku niezgodności wielkości mierzonej i wejściowej, |
|
|
|
służy do przekazywania informacji o parametrach otoczenia. |
|
|
12 |
Zrobotyzowane stanowisko spawalnicze składa się z: |
|
|
|
robota wyposażonego w specjalny osprzęt spawalniczy |
|
|
|
wyposażenia peryferyjnego ( pozycjonera, źródła zasilania, uchwyty itp.) |
|
|
|
systemu sterowania typu MP lub CP |
|
|
|
zgrzewadła chłodzonego wodą |
|
|
13 |
Układ sterowania robota: |
|
|
|
przekazuje sygnały ze środowiska do układu sensorycznego, |
|
|
|
oddziaływuje na zespoły napędowe robota, |
|
|
|
składa się z czujnika, przetwornika pośredniczącego i przekładni pomiarowej, |
|
|
|
generuje sygnały włączające i wyłączające urządzenia zewnętrzne. |
|
|
14 |
Wymienić podstawowe elementy ochrony pośredniej na stanowiskach z robotem: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
Do zalet napędu elektrycznego w porównaniu z innymi napędami robotów należą: |
|
|
|
mały koszt uzyskiwanej energii, łatwe doprowadzenie energii |
|
|
|
prostota konstrukcji zespołu ruchu liniowego |
|
|
|
niezmienność parametrów pracy, cicha praca |
|
|
|
duża sztywność, wynikająca z małej ściśliwości prądu |
|
|
16 |
Przetworniki odczytujące przemieszczenie liniowe lub kątowe elementów robota: |
|
|
|
zawierają element kodowy i zespół odczytujący |
|
|
|
sumują elementarne zmiany wielkości wejściowej za pomocą licznika rewersyjnego |
|
|
|
dokonują zamiany przesunięcia liniowego lub kątowego na ciąg impulsów |
|
|
|
są wrażliwe na zanieczyszczenie styku, na zmiany temperatury i napięcia zasilającego |
|
|
17 |
Systemy sensoryczne (urządzenia i układy): |
|
|
|
wprowadzają do układu sterowania sprzężenie zwrotne ze środowiska |
|
|
|
umożliwiają działanie robota zgodnie z założonym algorytmem, przy zmianie środowiska |
|
|
|
są standardowym wyposażeniem robotów przemysłowych |
|
|
|
mogą być autonomicznym układem sterowania, albo jego integralną częścią |
|
|
18 |
Programowanie robotów przemysłowych: |
|
|
|
realizowane może być przez nauczanie |
|
|
|
odbywa się na specjalnych stanowiskach modelujących zadania |
|
|
|
realizowane jest tylko za pomocą matryc diodowych |
|
|
|
polega na zapisie kolejnych ruchów poszczególnych jednostek kinematycznych |
|
|
|
może być realizowane w na etapie symulacji procesu |
|
|
19 |
Matryca diodowa: |
|
|
|
połączona jest z przerzutnikami wz |
|
|
|
odbiera sygnały z rozdzielacza |
|
|
|
umożliwia programowanie urządzeń pracujących dwustanowo |
|
|
|
umożliwia kształtowanie przebiegu ruchu jednostki kinematycznej |
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SUMA PUNKTÓW CZĘŚCI PIERWSZEJ |
164 |
|
IMIĘ I NAZWISKO .............................................................. GRUPA .............
Punktacja: podana w kolumnie - odpowiedź pełna prawidłowa,
0 - brak odpowiedzi,
-3 - odpowiedź błędna
NR |
PYTANIE |
PKT |
|
1 |
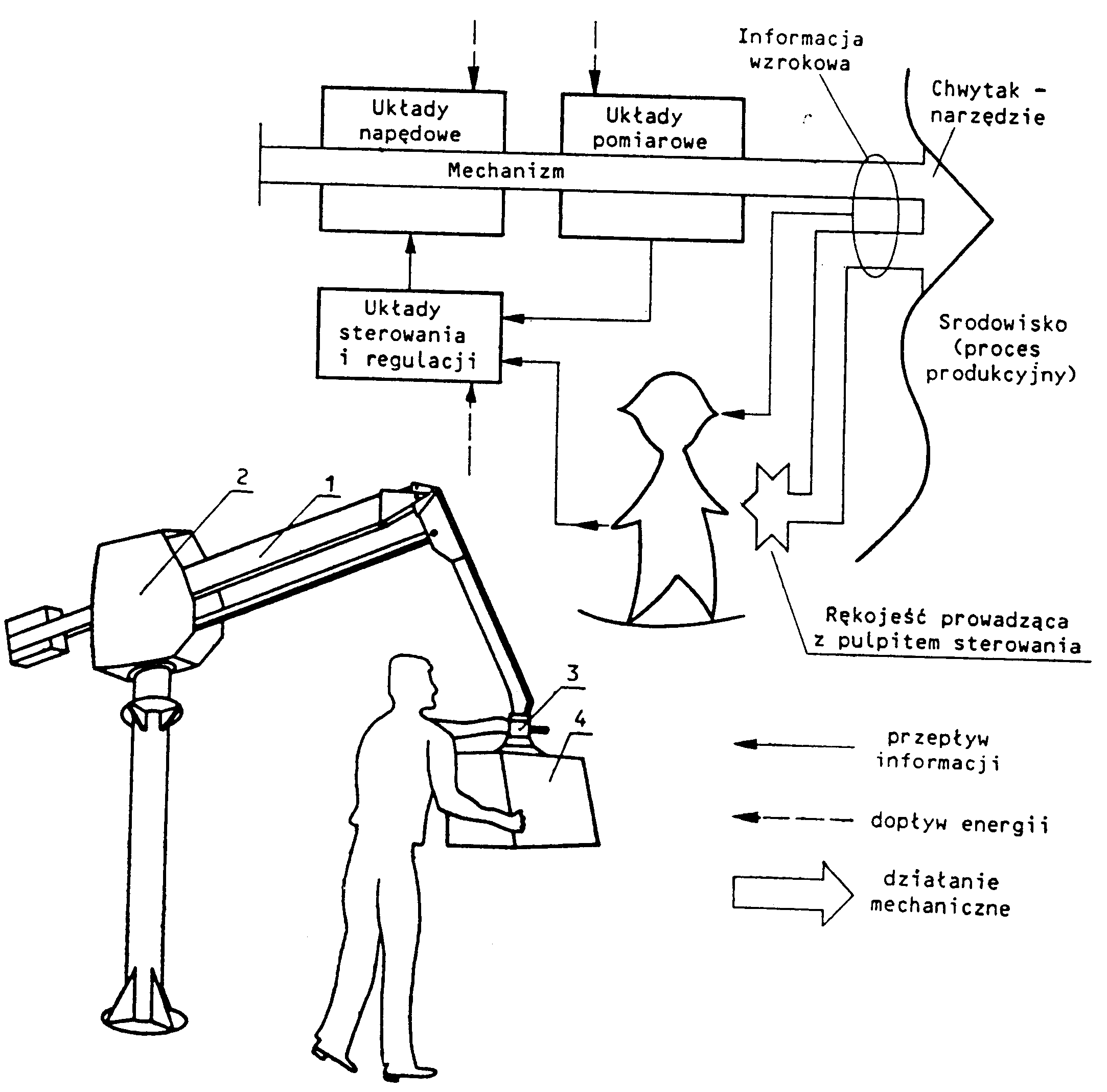
Proszę narysować schemat blokowy robota przemysłowego
|
10 |
|
2 |
i wymienić jego podstawowe elementy składowe
|
12 |
|
3 |
Proszę narysować schematycznie zrobotyzowane gniazdo obsługi wykrojnika (prasy)
|
12 |
|
4 |
|
8 |
|
5 |
Obliczyć ruchliwość i manewrowość manipulatora przedstawionego na rysunku, zapisać symbolicznie przedstawioną strukturę:
|
8 |
|
|
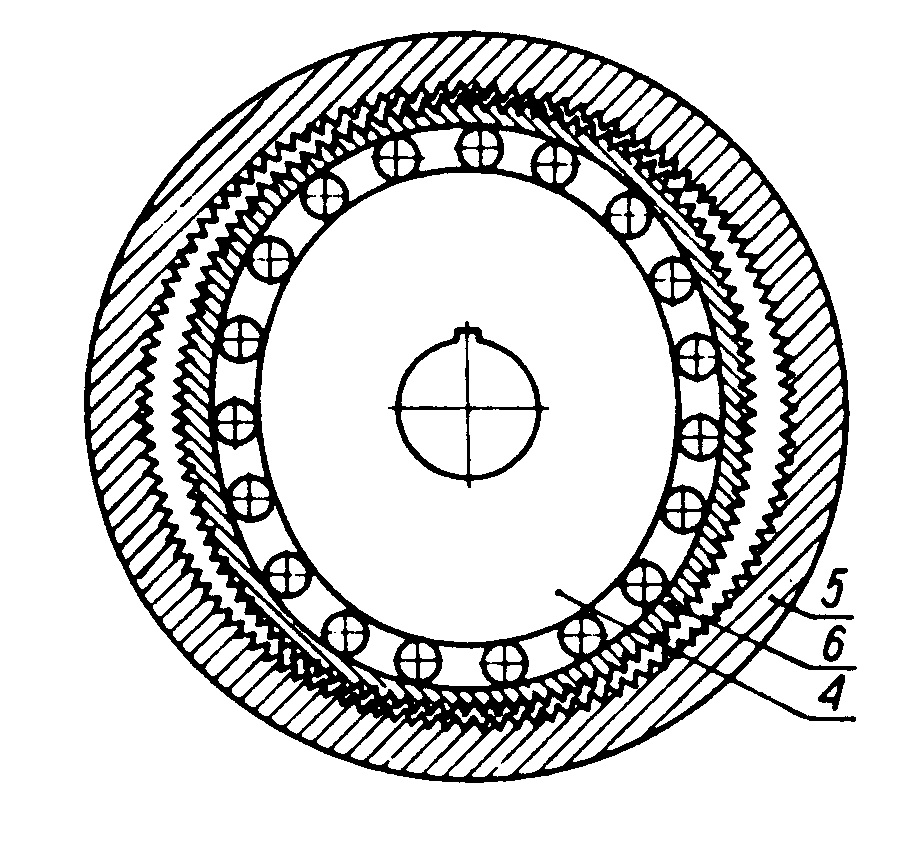
Dla mechanizmu przedstawionego na rysunku proszę wyznaczyć ruchliwość oraz narysować schemat przy zwartych końcówkach chwytnych
|
12 |
|

7 |
|
8 |
|
|
Proszę podać przeznaczenie urządzeń i wymienić ich podstawowe elementy składowe
|
10 |
|
9 |
Narysować strukturę kinematyczną manipulatora zawierającą dwie pary kinematyczne IV klasy i jedną parę kinematyczną V klasy, obliczyć ruchliwość tego manipulatora.
|
10 |
|
10 |
Proszę podać nazwy i przeznaczenie urządzeń przedstawionych na rysunkach:
|
12 |
|
11 |
Podać nazwy elementów pokazanych na rysunku i przeznaczenie układu; opisać działanie układu.
|
10 |
|
|
SUMA PUNKTÓW CZĘŚCI DRUGIEJ |
116 |
|
SUMA PUNKTÓW CZĘŚCI PIERWSZEJ |
164 |
|
|
SUMA PUNKTÓW |
280 |
|
|
OCENA
|
|
||


RTE03 egzamin0
Oceny: 3.0 (140p.), 3.5 (165p.), 4.0 (190p.), 4.5 (215p.), 5.0 (240p.)
Wyszukiwarka
Podobne podstrony:
PRZYKLADY EGZAMINACYJNYCH PYTAN TESTOWYCH 07
am2-zaocz-06-07-kol-I, Do nauki, Przykładowe egzaminy, AM 2
Przykladowy egzamin chemia organiczna - ICiP - 2010-zima. , Egzamin
15 przykladowy egzamin z fizyki
ODPOWIEDZI Przykładowy egzamin teoretyczny technik informatyk 7
przykładowy egzamin 2, gramatyka opisowa
Filozofia przykladowy egzamin
WYKŁADY Przykładowy egzamin
przykładowy egzamin
Przykladowy egzamin IM 2014 lato (1), AGH, Fizyka
ODPOWIEDZI Przykładowy egzamin teoretyczny technik hotelarstwa
Mleczarstwo - przykładowy egzamin, Nauka, Technologia mleczarska
egzamin przykładowy, egzamin przykladowy 2
Przykladowy egzamin
przykładowy egzamin grama
Statystyka przyklad egzaminu2
więcej podobnych podstron