zebrane przez: P.Wilk
Opracowanie do kolokwium z PSR
04.05.2013
Spis treści
|
1. |
Czujniki, pozycja robota, nawigacja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3 |
||
|
|
1.1. |
Planowanie trajektorii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3 |
|
|
|
1.2. |
Czujniki |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3 |
|
|
1.3. |
Pomiar pozycji robota . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3 |
|
|
|
|
1.3.1. |
Względny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3 |
|
|
|
1.3.2. |
Bezwzględny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
3 |
|
|
1.4. Pomiar drogi i kąta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4 |
||
|
2. |
Komunikacja z układem sterowania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
6 |
||
|
|
2.1. |
RS232 . |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
6 |
|
|
2.2. |
RS485 . |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
6 |
|
|
2.3. |
Komunikacja radiowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
6 |
|
|
|
2.4. |
I2C (TWI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
7 |
|
|
|
2.5. |
SPI . . |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
7 |
|
|
2.6. |
1-wire . |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
7 |
|
3. |
Sterowanie . |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
8 |
|
|
|
3.1. |
PWM . |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
8 |
|
|
3.2. |
Regulator PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
8 |
|
|
4. |
Napędy . . . |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
9 |
|
|
|
4.1. |
Silnik . |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
10 |
|
|
|
4.1.1. |
Prądu stałego - DC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
10 |
|
|
|
4.1.2. Bezszczotkowy silnik prądu stałego BLDC . . . . . . . . . . . . . . . . . . . . . . . . |
11 |
|
|
|
|
4.1.3. |
Dobór silnika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
13 |
|
|
4.2. |
Enkodery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
15 |
|
|
|
|
4.2.1. |
Optyczne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
15 |
|
|
|
4.2.2. |
Przyrostowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
15 |
|
|
|
4.2.3. |
Absolutne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
15 |
|
|
4.3. |
Przekładnie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
15 |
|
|
|
|
4.3.1. |
Zębate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
15 |
|
|
|
4.3.2. |
Ślimakowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
18 |
|
|
|
4.3.3. |
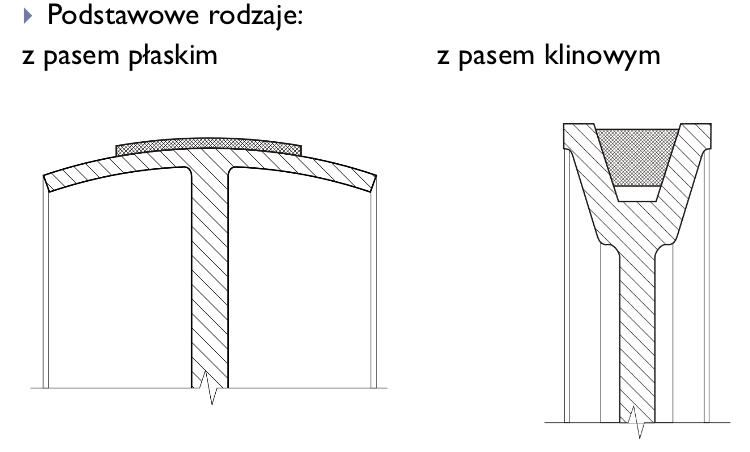
Pasowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
18 |
|
|
|
4.3.4. |
Planetarne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
19 |
|
|
|
4.3.5. |
Harmoniczne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
21 |
|
5. |
Układy zasilające . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
21 |
||
|
6. |
Roboty mobilne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
22 |
||
|
|
6.1. |
Rodzaje kół . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
22 |
|
|
|
6.2. |
Napędy |
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
23 |
|
|
|
6.2.1. |
Napęd różnicowy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
23 |
6.3. Więzy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
6.4. Więzy kinematyczne kołowych robotów mobilnych . . . . . . . . . . . . . . . . . . . . . . . 27
7. Roboty kroczące . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 7.1. Podział maszyn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 7.2. Chód . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 7.3. Chód statyczny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 7.4. Chód dynamiczny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Bibliografia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
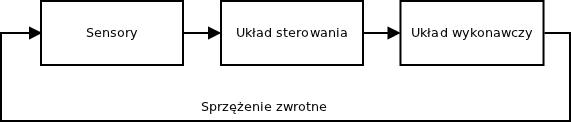
1. Czujniki, pozycja robota, nawigacja
1.1. Planowanie trajektorii
|
Off-line |
On-line |
|
Trajektoria może być optymalna |
Adaptacja do zmian otoczenia |
|
Czas obliczeń zbyt długi do sterowania w czasie rzeczywistym |
Trajektorie tylko częściowo optymalne |
1.2. Czujniki
Każdy robot wykonujący jakieś zadanie musi być wyposażony w układ sensorów dostarczających informację o otoczeniu. Sensor (czujnik) to przetwornik zmieniający warunki otoczenia (takie jak np. oświetlenie, natężenie dźwięku) na sygnał elektryczny.
Czujniki dotykowe - to po prostu wyłączniki - z reguły normalnie otwarte - działając na nie niewielką siłą powodujemy zwarcie obwodu - do układu sterowania dostarczana jest informacje, że coś oddziałuje na robota siłą.
Istnieją jeszcze czujniki siły nacisku. Najpopularniejsze to tensometry - składają się zwykle z cienkiej folii, która zmienia swą rezystancję pod wpływem rozciągania.
1.3. Pomiar pozycji robota
1.3.1. Względny
Bazuje na informacjach o poprzednim położeniu robota
Odometria Metoda ta wykorzystuje enkodery do pomiaru obrotu koła i/lub orientacji koła skrętnego. Zaletą tej metody jest to, że jest ona całkowicie samodzielna - jest w stanie w każdej chwili podać przybliżoną pozycję robota. Wadą tej metody jest fakt, że błąd pozycji rośnie w nieskończoność, jeśli nie zastosuje się okresowej korekcji pozycji z niezależnego źródła.
Nawigacja inercyjna Metoda ta wykorzystuje żyroskopy i akcelerometry do pomiaru tempa obrotu i prędkości. Pomiary są całkowane (lub podwójnie całkowane), by otrzymać pozycję. Niestety dane są obarczone błędem zależnym od czasu wynikającym z konieczności całkowania danych, by uzyskać pozycję; niewielki stały błąd całkowania rośnie w nieskończoność. Dlatego obydwie metody nie nadawają się do pomiaru pozycji na dłuższy okres czasu. Ponadto sensory inercyjne są bardzo drogie.
1.3.2. Bezwzględny
Pomiar nie zależy od wcześniejszych pozycji robota
Aktywne markery Metoda ta wylicza bezwzględną pozycję robota na podstawie pomiaru odległo-ści od trzech lub więcej aktywnie nadających markerów. Nadajniki zwykle używają światła lub fal radiowych, muszą być ulokowane w znanych punktach otoczenia
3
Rozpoznawanie charakterystycznych punktów Rozpoznawanie różnego typu znaczników. W tej metodzie wyróżniające punkty są umieszczone w znanych lokalizacjach otoczenia. Zaletą jest to, że charakterystyczne punkty mogą być projektowane dla optymalnej wykrywalności nawet w niekorzyst-nych warunkach otoczenia. Metoda ma taką zaletę, że blędy pozycjonowania są ograniczone, ale wykrywanie zewnętrznych znaków oraz pozycjonowanie w czasie rzeczywistym nie zawsze są możliwe.
Przykład. Rozpoznanie przez robota znacznika skrętu w lewo
Algorytm sterowania:

GPS Global Positioning System - jeden z systemów nawigacji satelitarnej obejmujący swoim zasięgiem całą kulę ziemską. System składa się z trzech segmentów: segmentu kosmicznego - 31 satelitów orbitujących wokół Ziemi na średniej orbicie okołoziemskiej; segmentu naziemnego - stacji kontrolnych i monitorujących na ziemi oraz segmentu użytkownika - odbiorników sygnału.
Działanie polega na pomiarze czasu dotarcia sygnału sygnału radiowego z satelitów do odbiornika. Znając prędkość fali elektromagnetycznej oraz znając dokładny czas wysłania danego sygnału, można obliczyć odległość odbiornika od satelitów.
Dopasowywanie modelu W tej metodzie informacje otrzymywane z sensorów są porównywane z mapą albo z modelem otoczenia. Jeśli właściwości środowiska pobrane z sensorów zgadzają się z mapą, wówczas może być wyznaczona bezwględna lokalizacja robota. Systemy oparte na mapach często zawierają układy ulepszania map na podstawie nowych informacji z czujników w środowisku dynamicznym oraz układy łączenia/dołączania lokalnych map do mapy globalnej, co pozwala na odkrywanie wcześniej nieznanych obszarów.
1.4. Pomiar drogi i kąta
Metody potencjometryczne W metodach potencjometrycznych wielkość wejściowa jest odwzoro-wana w zmianę oporności. Wady: skończona liczba obrotów, mechaniczne zużywanie się, nieliniowe przy dokładnych pomiarach.
Indukcyjne Wykorzystuje się do pomiaru zmiany indukcji magnetycznej L w cewce na skutek ruchu ciała ferromagnetycznego w jej polu magnetycznym.
Sensory pola magnetycznego Wykorzystują odchylenie ładunków poruszających się w polu magne-tycznym. Na elektrony działa siła Lorentza F:
4
F = Qw B
Gdzie: Q - ładunek elektryczny, w - wektor prędkości poruszającego się ładunku, B - indukcja pola magnetycznego, B = H, H - natężenie pola magnetycznego.
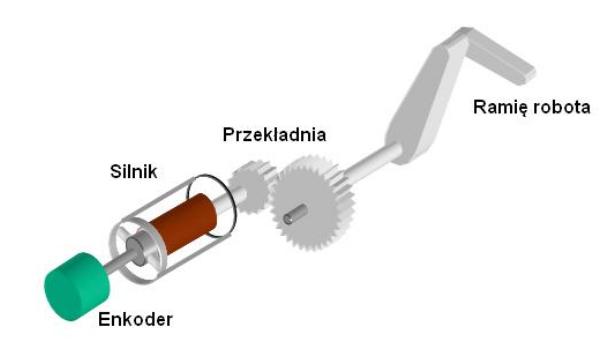
Enkoder optyczny Zasada działania enkoderów optycznych: na wale silnika lub osi, której kąt lub prędkość kątową chcemy badać, umieszczamy dysk z odpowiednimi otworami. Następnie z jednej strony dysku umieszczamy diodę emitującą wiązkę podczerwieni, z drugiej fototranzystor wykrywający promieniowanie podczerwone. Obracająca się tarcza przesłania wiązkę powodując, że fototranzystor odbiera ciąg impulsów o częstotliwości zależnej od prędkości kątowej wału, na którym dysk jest umieszczony, a ilość tych impulsów jest odpowiednio interpretowana jako kąt wychylenia tego wału. Są dwa podstawowe typy enkoderów optycznych: impulsowe i kodowe.
Enkoder inkrementalny Przetwornik, którego zadaniem jest generowanie impulsów (przyrosty ką-towe) odpowiadających ruchowi obrotowemu. Charakterystyczną cechą tych enkoderów jest stała liczba impulsów na wyjściu do 10 000 impulsów/obrót, odpowiadająca rozdzielczości systemu pomia-rowego. W celu kontroli kierunku (prawo-lewo), drugi w kolejności sygnał jest przesunięty fazowo o 90st. Licznik zewnętrznego systemu kontroli może być ponownie ustawiany dodatkowym zerowym impulsem.
Enkoder kodowy Zasada działania opiera się na przyporządkowaniu odpowiednim wartościom kąta, kodowanych wartości liczbowych. Na wałku napędowym enkodera znajduje się tarcza kodowa, która zawiera w formie kodu wartości liczbowe odpowiadające przesunięciom kątowym. Pozwala to na zadawanie wartości absolutnych w dowolnym momencie, bez konieczności porównywania z punktem odniesienia. Enkoder kodowy pozwala określić dokładną informację o pozycji po ponownym uru-chomieniu, gdy zanikło napięcie zasilania systemu lub enkodera. Jeżeli po zaniku zasilania miał miejsce jakikolwiek ruch mechaniczny, faktyczna pozycja mechaniczna jest odczytana natychmiast po odzyskaniu zasilania. Odczytane wartości są digitalizowane i są dostępne jako słowo w kodzie GRAY’a na wyjściu. Dzięki temu, że kod GRAY’a zmienia wartość tylko na jednym bicie o jedną pozycję w każdym kroku pomiarowym, łatwo jest kontrolować poprawność przenoszenia kodu.
Dalmierze Do pomiaru odległości w robotach mobilnych najczęściej stosowane są czujniki odległości bazujące na metodzie polegającej na pomiarze przelotu impulsu energii od nadajnika do przeszkody i z powrotem. Są też metody polegające na pomiarze przesunięcia fazowego pomiędzy sygnałem wysłanym a sygnałem odbieranym. Jako medium (nośnik energii) najczęściej stosowane są:
— podczerwień - dalmierze IR charakteryzują się niewielkimi gabarytami i niewielkim poborem mocy; ich wadą jest to, że jakość pomiaru zależy od koloru przeszkody i oświetlenia w pomieszczeniu
— ultradźwięki (sonary) - pomiar jest idealny, gdy sygnał jest prostopadły do powierzchni
— skupiona wiązka światła (dalmierze laserowe) - bardzo duża dokładność przy pomiarze odległości od przeszkód
— fale radiowe (radary)
Układy nawigacji inercyjnej
Akcelerometry Są czujnikami służącymi do pomiaru przyspieszenia. Występują czujniki w postaci jedno oraz wieloosiowej. Za ich pomocą można mierzyć zarówno wartość jak i kierunek przyspie-szenia, co oznacza, że pomiary są wielkościami wektorowymi. Akcelerometry są w stanie mierzyć przyspieszenie statyczne i dynamiczne, dając możliwość pomiaru pochylenia, wibracji oraz wykrywania zderzeń. Najprostsza zasada działania – wewnętrzny układ kondensorów, pod wpływem siły zmienia się pojemność (okładki oddalają się od siebie lub zbliżają).
5
Żyroskop Urządzenie do pomiaru lub utrzymywania położenia kątowego, działające w oparciu o zasadę zachowania momentu pędu. Obecnie coraz częściej używana jest nazwa czujnik prędkości kątowej, który podaje nam informacje o prędkości kątowej wokół danej osi.
Inne czujniki - magnetometr Jest urządzeniem służącym do pomiaru natężenia oraz kierunku pola magnetycznego jak i grawitacyjnego. Czujniki te możemy podzielić na skalarne, które dokonują pomiaru całkowitego pola występującego wokół czujnika oraz wektorowe, mierzące pole magnetyczne przenikające czujnik wzdłuż swoich osi pomiarowych. Pracuje jako elektroniczny kompas; wykorzy-stywany w systemach nawigacyjnych – wspomaganie GPSa - wprowadza korekty na zadany punkt, w systemach naprowadzania rakiet
2. Komunikacja z układem sterowania
Komunikację możemy podzielić na:
— wymiana informacji miedzy komputerem PC a sterownikiem (terminal, aplikacja dedykowana - wizualizacja procesu sterowania)
— programowanie
— komunikacja wewnątrz układu sterowania (magistrale wymiany danych: I2C, SPI, 1-wire, czujniki, przetworniki)
— komunikacja radiowa (telemetria)
2.1. RS232
Standard RS-232 opisuje sposób połączenia urządzeń DTE (Data Terminal Equipment) tj. urzą-dzeń końcowych danych (np. komputer) oraz urządzeń DCE (Data Communication Equipment), czyli urządzeń komunikacji danych (np. modem). Standard określa nazwy styków złącza oraz przypisane im sygnały, a także specyfikację elektryczną obwodów wewnętrznych. Standard ten definiuje normy wtyczek i kabli portów szeregowych typu COM.
RS-232 jest magistralą komunikacyjną przeznaczoną do szeregowej transmisji danych. Najbardziej popularna wersja tego standardu, RS-232C pozwala na transfer na odległość nie przekraczającą 15m z szybkością maksymalną 20kb/s.
2.2. RS485
Standard RS485 składa się z różnicowego (symetrycznego) nadajnika, dwuprzewodowego toru transmisyjnego i różnicowego odbiornika. Dla tego standardu nie ma konieczności prowadzenia prze-wodu powrotnego. Standard RS485 umożliwia podłączenie wielu nadajników i odbiorników (maksy-malnie do 32). Ograniczenie wynika z ograniczeń energetycznych odbiornika. Najczęściej stosowaną topologią dla takich standardów jest topologia magistrali. Zasięg tego standardu to ok. 1200m. Prędkości transmisji jakie można uzyskać to 35Mbit/s (do 10m) i 100Kbit/s (do 1200m). RS485 jest najczęściej stosowanych interfejsem przewodowym w sieciach przemysłowych - m.in. dlatego, że przesył różnicowy zapobiega wpływowi zakłóceń zewnętrznych (np. sprzętu indukcyjnego jak silniki) na transmisję danych. Na bazie tego interfejsu opracowano wiele protokołów komunikacyjnych.
2.3. Komunikacja radiowa
(dodatkowe, chyba nie było na wykładzie) Transmisja danych w sieciach bezprzewodowych (wy-brane protokoły i interfejsy):
6
Bluetooth Technologia bezprzewodowej komunikacji krótkiego zasięgu pomiedzy różnymi urządze-niami elektronicznymi. Specyfikacja tego otwartego standardu obejmuje trzy klasy mocy nadawczej 1-3 o zasięgu 100, 10 oraz 1 metra w otwartej przestrzeni. Najczęściej spotykaną klasą jest klasa druga. Technologia korzysta z fal radiowych w paśmie ISM 2,4 GHz.
Zigbee Sieci oparte na ZigBee charakteryzują się niewielkim poborem energii, niewielkimi przepływ-nościami (do 250kbps) oraz zasięgiem między węzłami rzędu do 100 m. Typowymi zastosowaniami są sieci sensorowe, sieci personalne (WPAN), automatyka domowa, systemy alarmowe, systemy mo-nitoringu.
2.4. I2C (TWI)
Dwukierunkowa szeregowa magistrala służąca do przesyłania danych w urządzeniach elektronicz-nych, opracowana przez firmę Philips.
Układy podłączone do magistrali mogą pracować w trybach: master (nadrzędny) i slave (pod-rzędny). Układ master steruje transmisją, slave tylko transmituje dane w odpowiedzi na rozkazy układu nadrzędnego. W jednej magistrali I2C może pracować kilka układów nadrzędnych i podrzęd-nych. Stosowane są dwa standardy interfejsu - pierwszy przewiduje prowadzenie transmisji z pręd-kościami do 100kbit/s (tryb normalny), w drugim prędkość transmisji może dochodzić do 400kbit/s (tryb szybki). Do transmisji używa się dwóch linii (dwukierunkowych): SDA - linia danych i SCL - linia zegarowa.
Każdy układ slave z magistralą I2C jest rozpoznawany przez unikatowy adres, niezależnie od tego, czy jest to mikrokontroler, pamięć czy inny układ.
Zastosowania: obsługa pamięci EEPROM, obsługa zegarów RTC, obsługa przetworników A/C
2.5. SPI
Serial Peripheral Interface Bus. Dwukierunkowa magistrala szeregowa opracowana w firmie Mo-torola. Urządzenia wykorzystujące magistralę SPI pracują w trybie master/slave, gdzie master od-powiedzialny jest za inicjalizację i obsługę ramki danych. Praca w trybie wielu urządzeń slave jest możliwa dzięki wykorzystaniu linii Slave Select (Chip Select). Czasami magistrala SPI jest nazywana czteroprzewodową “four wire serial bus”. Zastosowania: obsługa pamięci EEPROM, obsługa zegarów RTC, obsługa przetworników A/C MAX187 (12-bit), akcelerometry, żyroskopy.
2.6. 1-wire
Interfejs elektroniczny jak również i protokół komunikacyjny pomiędzy urządzeniami, opracowany w firmie Dallas/Maxim. Jego nazwa wywodzi się z faktu, że do komunikacji używana jest tylko jedna linia danych (oraz linia zegarowa). Odbiornik może być zasilany bezpośrednio z linii danych, wykorzystując zasilanie pasożytnicze, co jest zaletą tego interfejsu. Odbiornik wyposażony jest w kondensator o pojemności 800pF, który jest ładowany z linii danych - następnie energia w nim zgro-madzona używana jest do zasilania odbiornika. Zastosowania: obsługa czujników temperatury, klucz i-button
7
3. Sterowanie
3.1. PWM
Pulse-width modulation. Metoda regulacji sygnału prądowego lub napięciowego, polegająca na zmianie szerokości impulsu o stałej amplitudzie, używana we wzmacniaczach, zasilaczach impulsowych oraz układach sterujących pracą silników elektrycznych. Układ PWM zasila urządzenie bezpośrednio lub przez filtr dolnoprzepustowy, który wygładza przebieg napięcia lub prądu.
3.2. Regulator PID
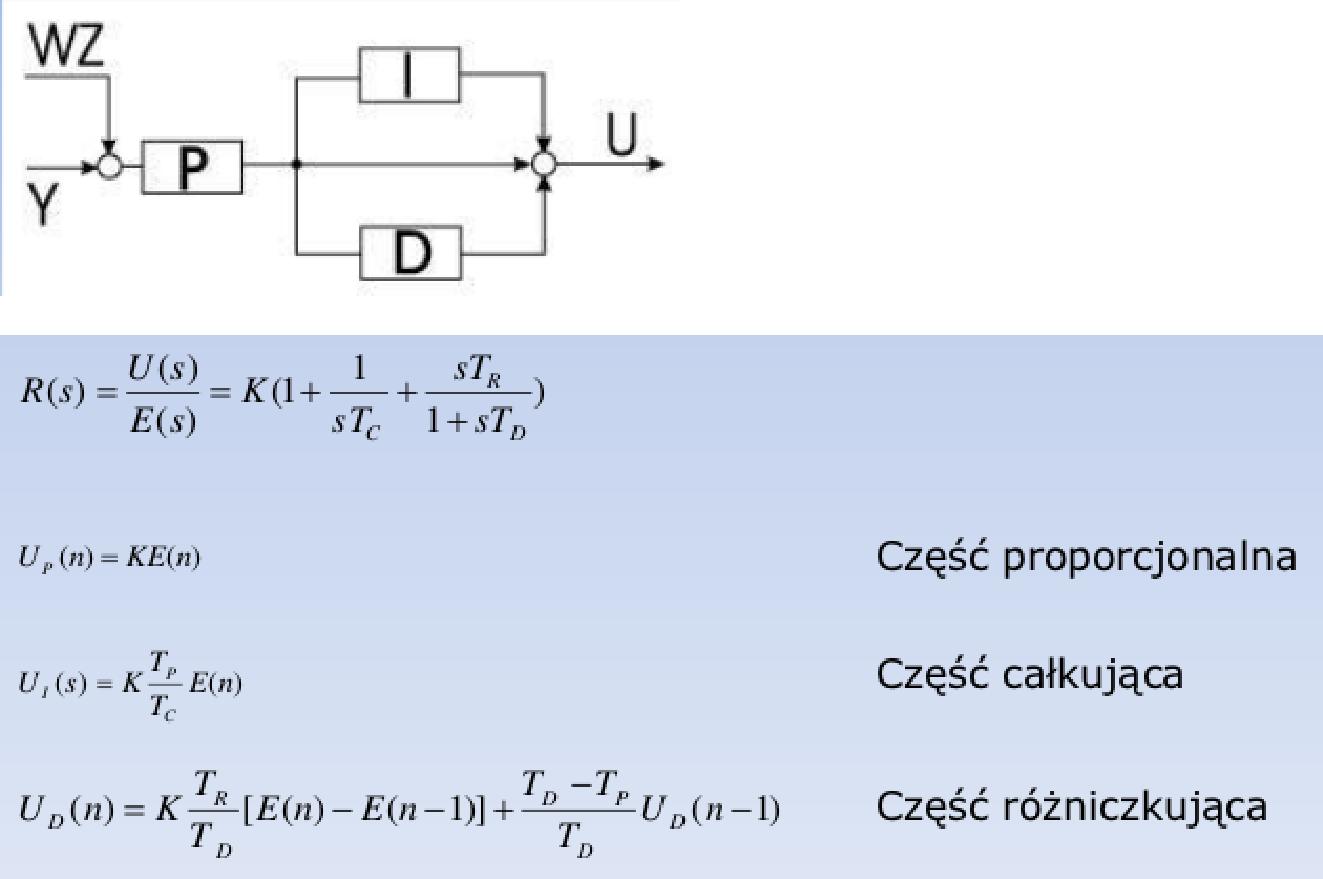
Ograniczenie sygnału wyjściowego - zakres pracy układu PWM dla rozdzielczości 10bit wynosi 0-1023. Przekroczenie tej wartości powoduje przepełnienie licznika.
Ograniczenie całkowania - nasycenie jest takim stanem, w którym z różnych powodów, np. utrzy-mywania się uchybu długa na wysokim poziomie, część całkująca regulatora osiąga bardzo dużą
8
wartość. W przypadku regulatorów analogowych, w których wartość ta jest ograniczona fizykal-nie, to zjawisko nie stanowi dużego problemu. W przypadku regulatora cyfrowego wartość ta jednak może być bardzo duża; w związku z tym po powrocie układu regulacji do normalnej pracy zmniejszanie tej wartości może potrwać bardzo długo. Spotykane są rozwiązania tego problemu między innymi przez wpływ na składową całkową regulatora, wpływ na wszystkie składowe lub przez wyłączenie całkowania.
4. Napędy
9
4.1. Silnik
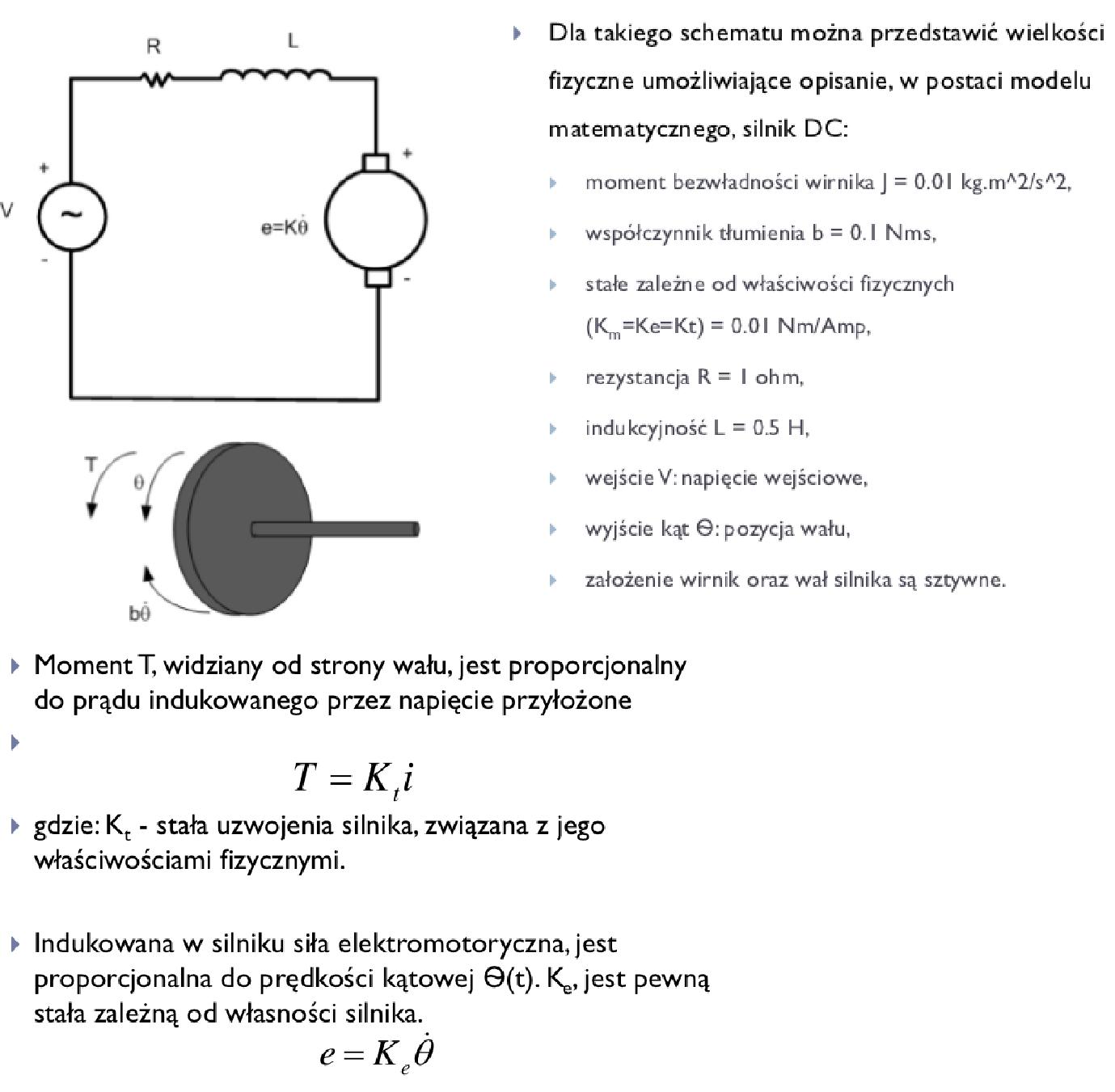
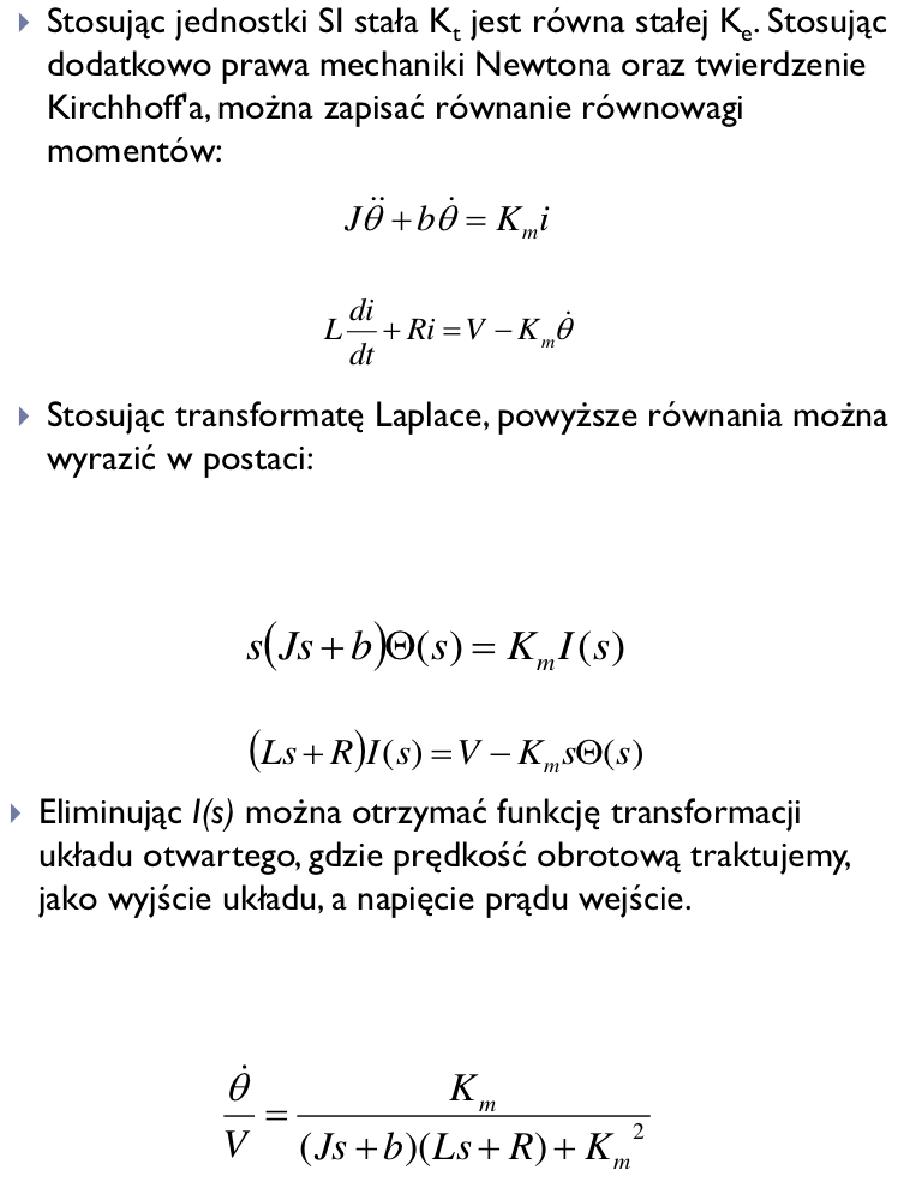
4.1.1. Prądu stałego - DC
10
4.1.2. Bezszczotkowy silnik prądu stałego BLDC
Są znane od bardzo dawna, jednak ich powszechne zastosowanie umożliwiły dopiero tanie scalone sterowniki impulsowe. W silniku z wirującym magnesem, uzwojenia znajdują się w stojanie, a wirnik wykonany jest z odpowiednio ukształtowanego magnesu. W terminologii angielskiej używa się dla silników bezszczotkowych akronimu BLDC (Brushless DC Motor).
Ze względu na liczbę uzwojeń wyróżniamy silniki bezszczotkowe 2-fazowe i 3-fazowe, natomiast w zależności od sposobu zasilania uzwojeń - silniki unipolarne i bipolarne. Bezkomutatorowe silniki prądu stałego należą do grupy silników synchronicznych. Pole wytwarzane przez uzwojenie stojana, silników z tej grupy, porusza się z taką samą prędkością co pole wytworzone przez magnesy trwałe na wirniku.
Sygnał sprzężenia zwrotnego determinuje generowanie sygnałów sterujących, które zasilają fazy silnika. Zsynchronizowanie sygnału położenia silnika i zasilania jego faz pozwala uzyskać stały mo-ment i prędkość obrotową silnika.
Zalety silnika bezszczotkowego wynikają z zastąpienia komutatora mechanicznego elektronicznym.
11
Brak szczotek na komutatorze powoduje mniejsze zakłócenia radioelektryczne (nie dochodzi do wy-ładowań łukowych), umożliwia to prace takich silników w środowiskach wybuchowych i agresywnych. Brak szczotek zwiększa również bezawaryjność silnika i jego żywotność, która sprowadza się, w zasa-dzie, do żywotności zastosowanych łożysk wirnika. Zaletą zastosowania komutatora elektronicznego jest możliwość stosunkowego łatwego kształtowania charakterystyk silnika. Parametry mechaniczne BLDC są porównywalne z silnikami komutatorowymi z magnesem trwałym - podobna moc i moment obrotowy przy zbliżonych wymiarach i masie.
Cena silnika bezszczotkowego jest 2-3 - kronie wyższa od podobnego silnika komutatorowego, jednak kompensuje ją 20krotnie większa trwałość. Możliwość precyzyjnego sterowania powoduje, że w wielu aplikacjach są one stosowane zamiast silników krokowych - od których są mniejsze, lżejsze i sprawują się lepiej przy dużych prędkościach obrotowych.
W silniku bezszczotkowym prądu stałego wirnik zawierający magnesy stałe przemieszcza się wzglę-dem uzwojeń umieszczonych w żłobkach stojana. Podobnie jak w przypadku konstrukcji konwencjo-nalnej, tutaj także prąd płynący w uzwojeniach musi zmieniać swoją biegunowość za każdym razem, gdy biegu wirnika minie uzwojenie danej fazy, aby zapewnić jednokierunkowość wytworzonego mo-mentu. Tak więc przepływ prądu i jego biegunowość musi być synchronizowana ze zmianą położenia wirnika.
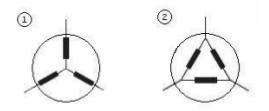
Najbardziej popularne i najszerzej stosowane są silniki trójfazowe. Pozwalają ze znacznie większą dokładnością sterować położeniem wirnika, dlatego znajdują one zastosowanie w aplikacjach, które wymagają dużej precyzji. Stosowane są dwa typy połączeń uzwojeń dla silników trójfazowych: gwiazda oraz delta.
Uzwojenia połączone w gwiazdę charakteryzują się większym napięciem zasilania i wskazane są w aplikacjach wymagających większego momentu obrotowego. Natomiast uzwojenia połączone w deltę znajdują zastosowanie w rozwiązaniach, w których wymagane są większe prędkości obrotowe silnika. Silniki z tak połączonymi uzwojeniami charakteryzują się mniejszym napięciem zasilania, lecz większym prądem.
Wyróżnić można dwie konstrukcje wirnika:
— z magnesami naklejonymi na powierzchnię wirnika
— z magnesami umieszczonymi promieniowo
Liczba biegunów stojana i wirnika determinuje wiele parametrów silnika. Ich stosunek określa krok silnika i wpływa na jakość wytwarzanego momentu. Większa liczba biegunów gwarantuje bardziej równomierne rozłożenie momentu napędowego, a mniejszy krok pozwala uzyskać większą moc przy małych prędkościach obrotowych.
Schemat zastępczy silnika BLDC:
12
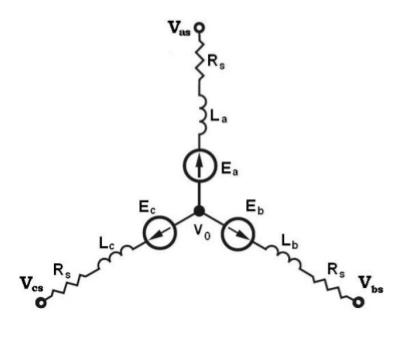
(tu model matematyczny BLDC)
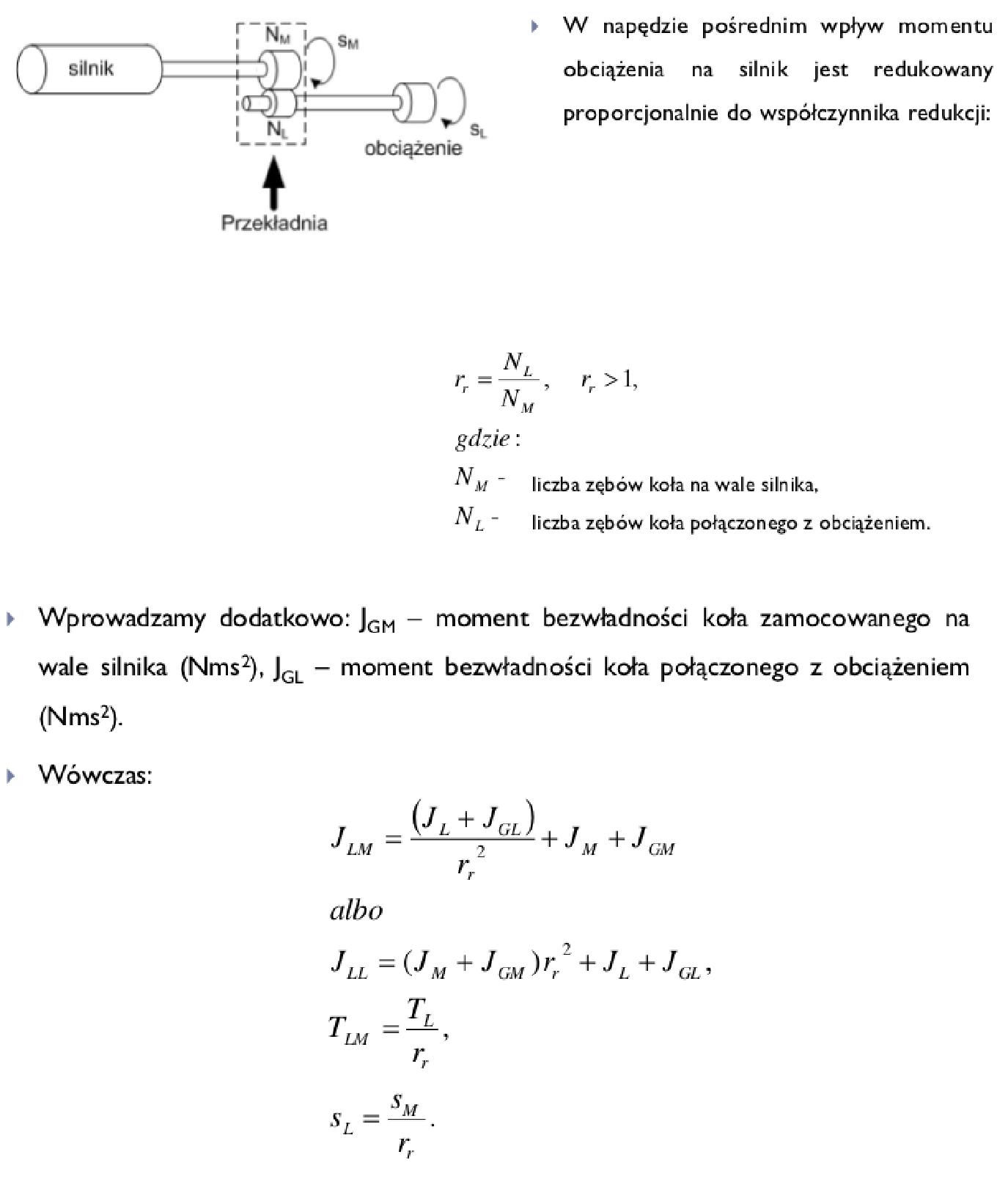
4.1.3. Dobór silnika
Rodzaje napędów:
— bezpośredni
— pośredni
Rotor silnika oraz przekładnia mają najczęściej kształt cylindryczny. Moment bezwładności JLwzdłuż osi symetrii pełnego cylindra o masie m i promieniu r wyraża się wzorem:
JL = mr2
2
Wprowadźmy oznaczenia:
sM - prędkość obrotowa silnika (w katalogach wyrażona w obr/min) sL - prędkość obrotowa obciążenia (obr/s)
JLM - całkowity moment bezwładności po stronie silnika (Nms2) JLL - całkowity moment bezwładności po stronie obciążenia (Nms2) JL - całkowity moment bezwładności obciążenia (Nms2)
JM - całkowity moment bezwładności silnika (Nms2)
TLM - moment działający na oś silnika przy stałej prędkości (moment ilości ruchu - kręt) (Nm) TL - moment obciążenia (Nm)

13
14
4.2. Enkodery
4.2.1. Optyczne
Skupiona wiązka światła padająca na fotodetektor jest okresowo przerywana przez kodowany wzór na obracającej się tarczy.
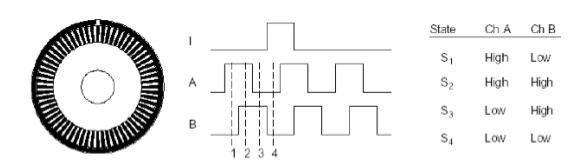
4.2.2. Przyrostowe
— jednokanałowe (tachometryczne) - problemy przy małych prędkościach (utrata stabilności, błędy kwantowania), nie umożliwiają określenia kierunku obrotów.
— fazowo-kwadraturowe - trójkanałowe (trzy tarcze), przebiegi w dwóch kanałach w postaci fal prostokątnych lub sinusoidalnych przesuniętych względem siebie o 90st. Trzecia tarcza - wyjście indeksowe generuje jeden impuls na jeden obrót wału.
4.2.3. Absolutne
Wynik pomiaru przedstawiany jest nieco inaczej, tzn. w postaci słowa o określonej ilości bitów, czyli ciąg bitów określających dokładnie położenia kątowe enkodera. Rozdzielczość enkodera jest określana za pośrednictwem ilości bitów w jakich przedstawiany jest wynik. Na przykład enkoder o rozdzielczości 8 bitów ma tarczę podzieloną na 256 części i jego rozdzielczość wynosi 1.40625 stopnia.
W przypadku enkoderów absolutnych, inaczej niż w enkoderach inkrementalnych, zawsze wiadomo w jakiej pozycji się on znajduje. Wynika to z budowy tarczy pomiarowej.
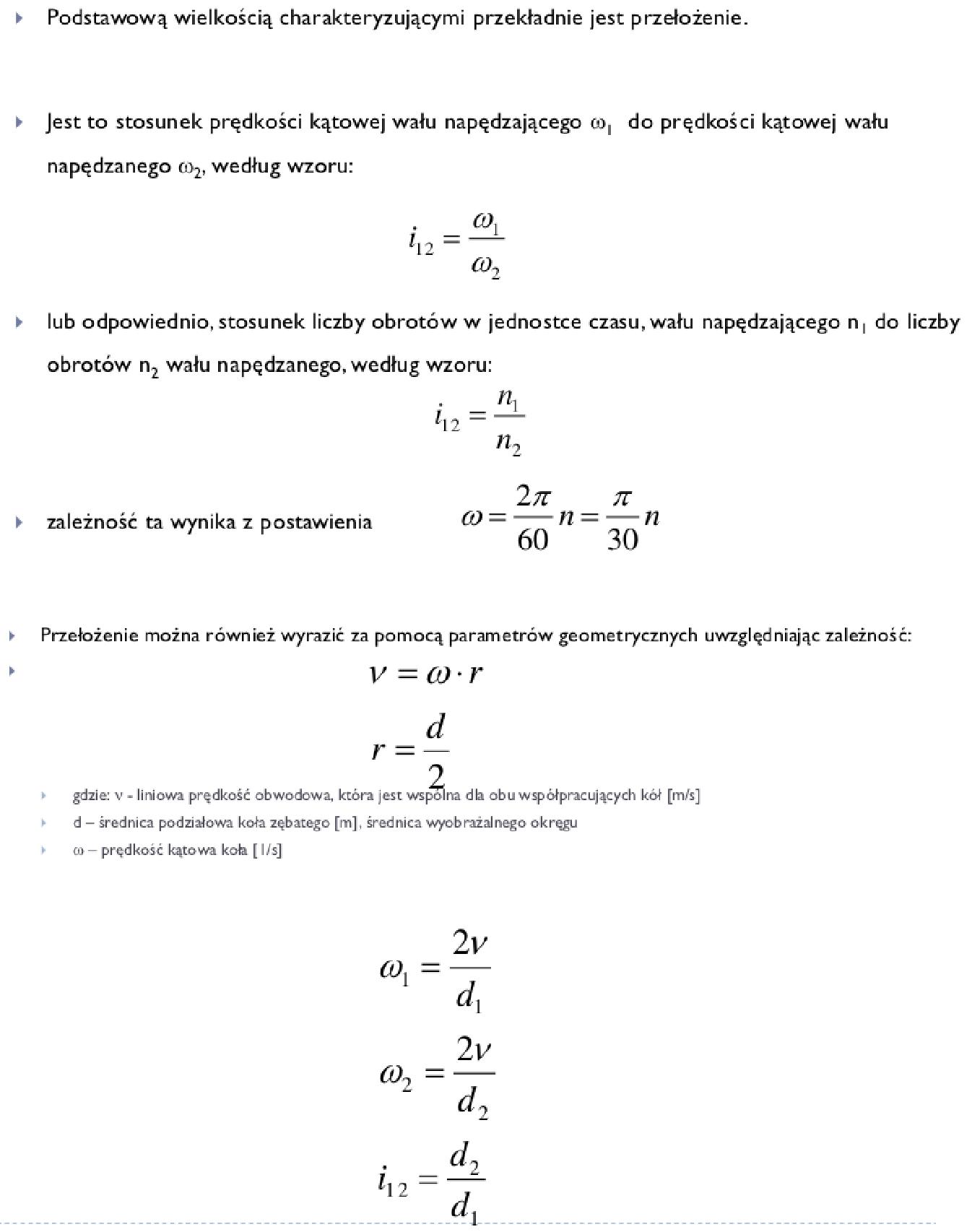
4.3. Przekładnie
Przekładnie mechaniczne są to części maszyn (mechanizmy), których zadaniem jest przenoszenie ruchu z wału czynnego (napędzającego) na wał bierny (napędzany), najczęściej z jednoczesną zmianą prędkości i momentu obrotowego.
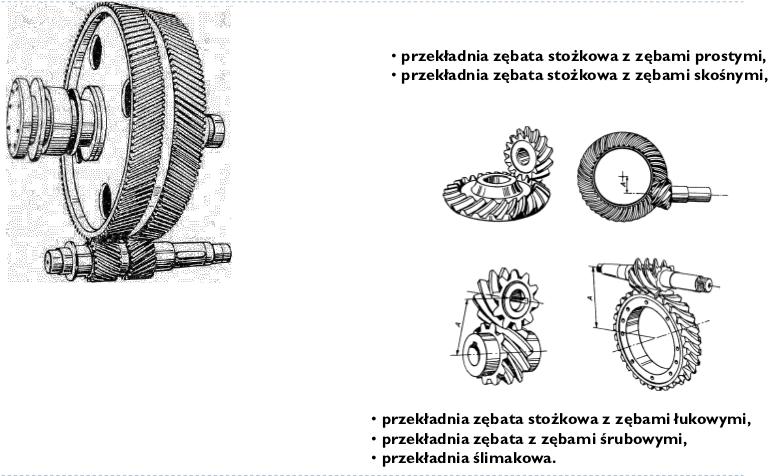
4.3.1. Zębate
Jest to przekładnia mechaniczna, w której ruch obrotowy jednego wału jest przenoszony na drugi, w wyniku zazębienia koła zębatego czynnego z kołem biernym.
Zasadniczym elementem przekładni zębatej jest para kół zębatych zwanych przekładnią zębatą, prostą.
W dużym uproszczeniu, charakterystyki przekładni prostych zależą od średnic współpracujących kół zębatych; ich wzajemnego usytuowania oraz wielkości i kształtu zębów.
Główne zalety przekładni zębatych:
— łatwość wykonania
— stosunkowo małe gabaryty
— stosunkowo cicha praca, gdy są odpowiednio smarowane
15
— duża równomierność pracy
— wysoka sprawność dochodząca do 98% (z wyjątkiem przekładni ślimakowej) Wady:
— stosunkowo niskie przełożenie dla pojedynczego stopnia
— sztywna geometria
— brak naturalnego zabezpieczenia przed przeciążeniem
16
17
4.3.2. Ślimakowe
To przekładnia zębata o osiach prostopadłych leżących w dwóch różnych płaszczyznach. W przekładniach ślimakowych współpracują dwa elementy o odmiennej konstrukcji:
— ślimak: wirnik śrubowy z gwintem trapezowym; zwykle wykonany ze stali hartowanej
— ślimacznica (koło ślimakowe): koło zębate; zwykle wykonane z żeliwa lub z brązu Zalety:
— możliwość uzyskania dużych przełożeń (1:50 i więcej)
— równomierność przeniesienia ruchu i cichobieżność
— możliwość uzyskania przekładni samohamownej (spadek sprawności)
Wady:
— mała sprawność
— nagrzewanie się przekładni
Przełożenie przekładni ślimakowej jest obliczane ze wzoru:
i12 = !1 = z1
!2 z2
w tym przypadku: z2- liczba zębów ślimacznicy, z1- krotność (znojność) ślimaka, zwykle równa jeden.
4.3.3. Pasowe
Zalety:
— łagodzenie gwałtownych zmian obciążenia
— zabezpieczenie innych zespołów napędowych przed nadmiernym przeciążeniem
— prostota i niskie koszty wytwarzania
— mała wrażliwość na dokładność wzajemnego ustawienia osi
Wady:
— mała zwartość
— duże siły obciążające wały i łożyska
— niestałość przełożenia
Przełożenia: stosowane są przełożenia w zakresie i=1,2-6 (maksymalnie 10)
Ilość pasów przekładni: w praktyce przyjmuje się liczbę pasów z = 1-5 (maksymalnie 8)
18
Im większa liczba pasów, tym wymagany jest mniejszy przekrój pojedynczego paska - tym większa zwartość przekładni - mniejszy rozstaw kół. Im większa ilość pasów tym większe prawdopodobieństwo nierównomiernego przenoszenia obciążeń - tym większe prawdopodobieństwo uszkodzenia przekładni.
Teoretyczne przełożenia przekładni pasowej:
it = d2 d1
gdzie: d1- średnica skuteczna koła napędzającego, d2- średnica skuteczna koła napędzanego Rzeczywiste przełożenie jest zmniejszone o poślizg, jakiemu ulega pas na kołach pasowych. Poślizg
pasa jest funkcją obciążenia, naciągu wstępnego pasa oraz stopnia jego zużycia.
4.3.4. Planetarne
Przekładnie można podzielić na:
— przekładnie, w których wszystkie koła są osadzone na wałach łożyskowych bezpośrednio w korpusie (przekładnie o osiach stałych)
— przekładnie, które przynajmniej jedno koło jest łożyskowane w elemencie obracającym się wzglę-
dem korpusu (przekładnie planetarne - obiegowe)
Przez przekładnię planetarną rozumiemy mechanizm złożony z 3 podstawowych części:
— koła zębatego wewnętrznego (centralnego) z uzębieniem zewnętrznym
— kilku mniejszych kół zębatych - tzw. satelitów (najczęściej 2, 3 lub satelity) oraz z zewnętrznego koła zębatego z uzębieniem wewnętrznym; satelity są połączone ze sobą jarzmem.
— każda z tych części może być napędzana lub napędzać
Przekładnie planetarne umożliwiają przenoszenie dużych mocy i uzyskiwanie dużych przełożeń przy stosunkowo małych wymiarach. Posiadają one szczególne właściwości polegające na tym, że pośred-niczące działanie pomiędzy kołem centralnym a wieńcem może spełniać więcej niż jeden satelita, co umożliwia zastosowanie zasady wewnętrznego podziału obciążenia, a także, że występuje w tych przekładniach zazębienie wewnętrzne, które ma szereg korzystnych własności, jak mały poślizg i moż-liwość przenoszenia znacznych względnych obciążeń przy miękkich zębach wieńca i twardych satelitów i koła centralnego.
Przekładnie te są również kilkakrotnie lżejsze od zwykłych przekładni o podobnych parametrach. Dodatkową własnością przekładni obiegowej jest to, że wał bierny leży w tej samej osi, co wał czynny.
Przełożenia przekładni obiegowej nie da się tak łatwo policzyć jak dla przekładni prostych. Można zastosować np. metodę “chwilowego środka obrotu”.
Metoda ta opiera się na zasadzie obowiązującej w ruchu płaskim (a ruch kół zębatych i jarzma w przekładni zębatej planetarnej można rozpatrywać w jednej płaszczyźnie), która mówi, że prędkość liniową v dowolnego punktu A ciała poruszającego się ruchem płaskim obrotowym z prędkością kątową względem nieruchomego w danej chwili punktu B można obliczyć jako iloczyn prędkości kątowej i odległości r między punktami A i B, czyli v = w x r
19

20
4.3.5. Harmoniczne
W przekładniach falowych, zwanych także przekładniami z podatnym wieńcem, przekazywanie ruchu odbywa się wskutek przemieszczania się fali odkształcenia jednego z członów przekładni, wy-konanego jako element elastyczny (podatny). Najprostsza przekładnia falowa składa się z trzech zasadniczych członów: sztywnej odkształcanego wieńca podatnego oraz wywołującego odkształcanie wieńca. tulei, generatora,
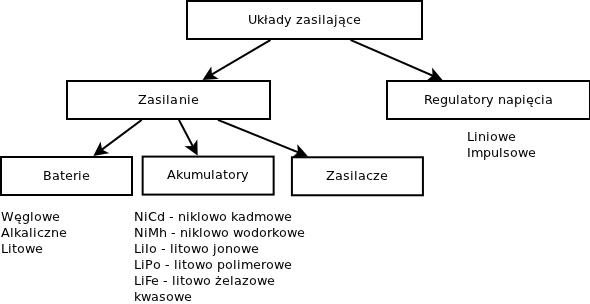
5. Układy zasilające
Uwagi:
Układy zasilające
— „problem pamięci” w akumulatorach – zmniejszał ich żywotność
— ogniwa litowo-jonowe – nie są zbyt wydajne prądowo
— ogniwa litowo-polimerowe – przy niewielkiej wadze, mają dużą pojemność i są wydajne prądowo (mogą oddać dziesiątki amper), rozładowanie poniżej 3V powoduje, że tracą swoje właściwości
Regulatory napięcia:
— liniowe - stabilizatory napięcia, duża część energii tracona na ciepło
— impulsowe - mają większą wydajność prądową niż regulatory liniowe; często istnieje możliwość programowania/ustawiania wartości napięcia, duża sprawność
21
6. Roboty mobilne
6.1. Rodzaje kół
Koło
zwykłe
Koło
orientowalne
22
Koło
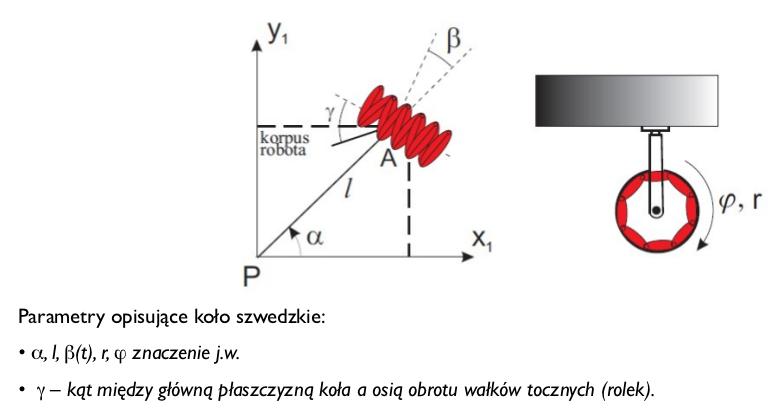
szweckie
Koło
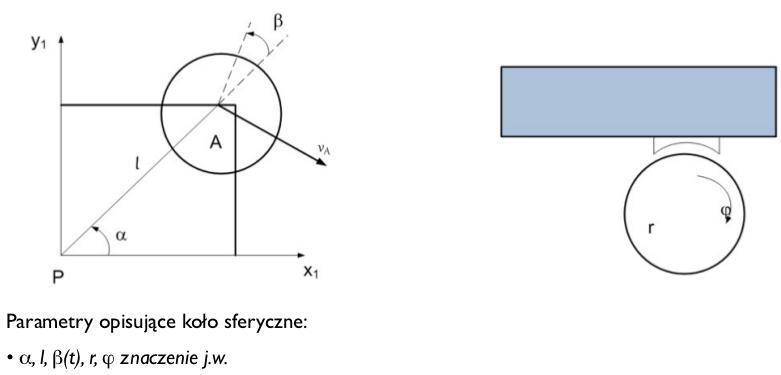
sferyczne
6.2. Napędy
Napęd synchroniczny - trzy napędzane koła w układzie trójkątny, wszystkie skierowane w jednym kierunku z możliwością zmiany kierunku ruchu bez zmiany orientacji bazy.
Napęd dookólny - przednie koło napędowe i kierujące, dwa koła tylnej osi są nie napędzane (są kołami biernymi).
Napęd Ackermana (samochód kinematyczny) - typowy czterokołowy pojazd, napęd na dwa koła (zazwyczaj przednie) jednej osi i dwa koła drugiej osi nie są napędzane.
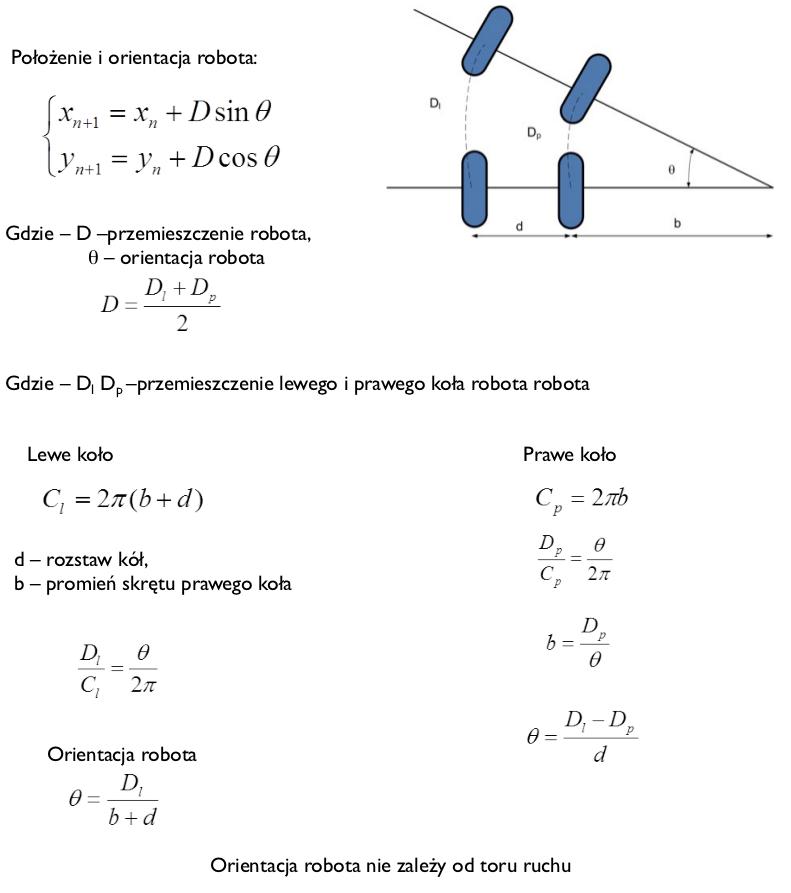
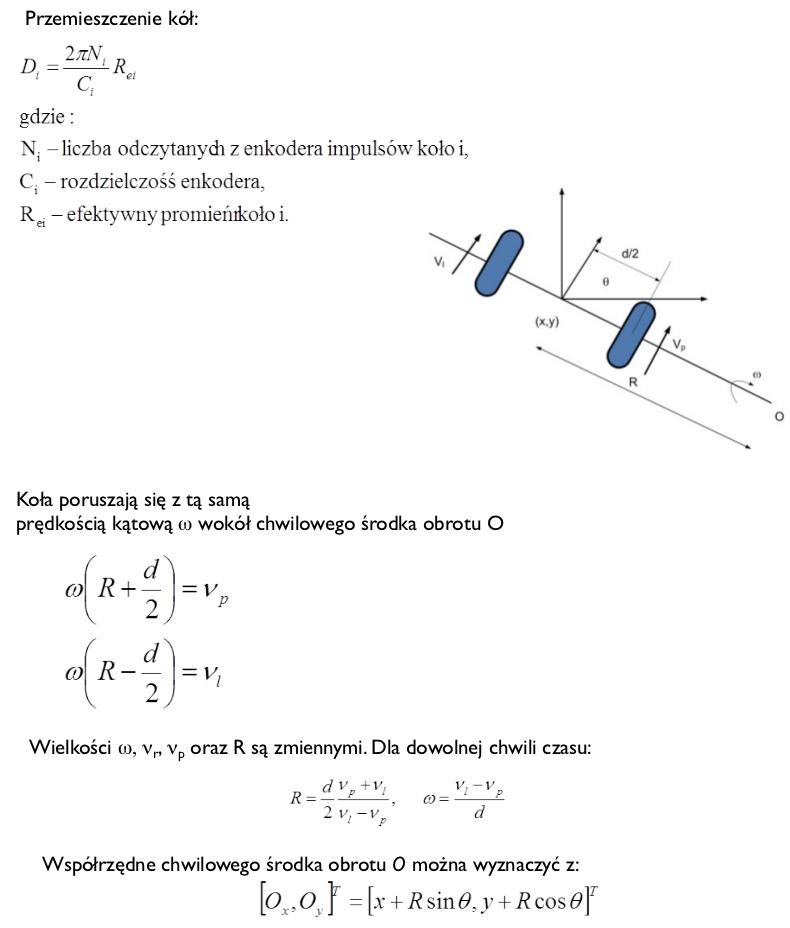
6.2.1. Napęd różnicowy
Dwa niezależnie napędzane koła jednej osi, dla zachowania równowagi dodane jest trzecie koło bierne (lub dwa bierne koła)
23
24
6.3. Więzy
Rozważać będziemy ruch układu n punktów materialnych względem pewnego inercjalnego układu współrzędnych. Na położenia i/lub prędkości punktów układu mogą być nałożone pewne ograniczenia zwane więzami. Układy materialne skrępowane więzami nazywają się nieswobodne w odróżnieniu od układów swobodnych, które nie podlegają żadnym więzom.
Ograniczenia swobody ruchu układu materialnego wyrażany analitycznie zazwyczaj w postaci układu równań lub nierówności nazywanych odpowiednio równaniami lub nierównościami więzów.
25
W wielu problemach dynamicznych ciało porusza się pod wpływem sił zewnętrznych po ustalonej powierzchni (lub krzywej) zwanej powierzchnią (krzywą) więzów. Opis tej powierzchni (krzywej) zapewnia równanie więzów w postaci uwikłanej:
— dla powierzchni: f(x; y; z; vx; vy; vz; t) = 0
— dwa równania dla krzywej: f1(x; y; z; vx; vy; vz; t) = 0 , f2(x; y; z; vx; vy; vz; t) = 0
Liczba stopni swobody NF ciała w ruchu z więzami opisany NK równaniami więzów wynosi: NF = 3 NK
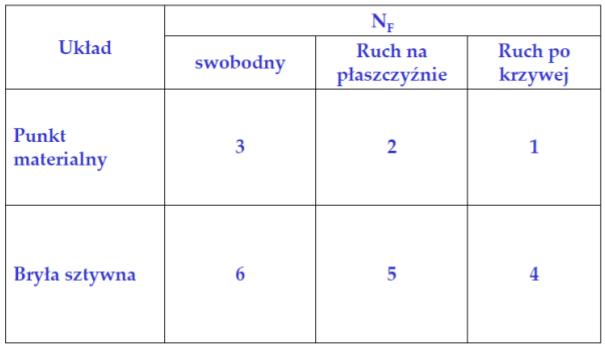
Ściśle rzecz biorąc równości z poprzedniej transparencji to tzw. więzy dwustronne, gdy ciało musi pozostawać na powierzchni lub krzywej więzów: f(x; y; z; vx; vy; vz; t) 0
Ogólnie możemy mieć do czynienia z nierównościami np. które definiują więzy jednostronne. Gdy równania (nierówności) więzów nie zależą explicite od składowych prędkości lub dają się
sprowadzić do takiej formy, mamy do czynienia z więzami holonomicznymi: dwustronne f(x; y; z; t) 0. Gdy występuje zależność od składowych prędkości, mamy więzy nieholonomiczne.
Gdy równania więzów nie zależą explicite od czasu, mamy do czynienia z więzami skleronomicz-nymi. Gdy zależność od czasu występuje - więzy reonomiczne.
Wzajemne związki między elementami układu robotycznego, a także między układem a jego otoczeniem reprezentujemy w formie ograniczeń (więzów) konfiguracyjnych:
f(q) = (f1(q); f2(q); : : : ; fk(q))T = 0
oraz ograniczeń (więzów) fazowych - postać Pfaffa: A(q)q0 = 0
Własność ograniczeń fazowych zwana holonomicznością decyduje o tym, czy obecność ograni-czeń fazowych prowadzi do ograniczenia dopuszczalnych konfiguracji układu. Ograniczenia fazowe nazywamy holonomicznymi, jeżeli możliwe jest ich scałkowanie i zastąpienie ograniczeniami postaci konfiguracyjnej. Holonomiczne ograniczenia fazowe można dołączyć do ograniczeń konfiguracyjnych.
Nieholonomiczność ograniczeń oznacza, że scałkowanie systemu nie jest możliwe i utrudnieniu może ulec sposób osiągania pewnych konfiguracji.
Przyjmiemy współrzędny uogólnione układu q = (x; y; ; ')T , gdzie x, y są współrzędnymi poło-żenia, orientacja, a ' kątem obrotu koła. Chcemy, aby koło poruszało się bez poślizgu. Ruch bez poślizgu bocznego oznacza, że brak jest składowej prostopadłej prędkości: x0 sin = y0 cos
Przedstawione w postaci Pfaffa ograniczenie wygląda następująco:
(sin ; cos ; 0; 0)q0 = 0
Warunkiem braku poślizgu wzdłużnego jest zerowa prędkość w punkcie styku koła z podłożem: v = r'0
26
Po przekształceniach:
(
x0 = vcos = r'0 cos y0 = vsin = r'0 sin
W postaci Pfaffa:
|
1 |
0 |
0 |
rcos |
q0 = 0 |
|
0 |
1 |
0 |
rsin |
|
W przypadku niespełnienia powyższej zależności może wystąpić jedno z następujących zjawisk: buksowanie (prędkość obrotu koła większa niż prędkość ruchu ciała: v < r'0
poślizg (prędkość ruchu ciała jest większa niż prędkość obrotu koła): v > r'0
6.4. Więzy kinematyczne kołowych robotów mobilnych
Koło zwykłe: kontakt między kołem a podłożem jest czystym toczeniem bez poślizgu. Prędkość punktu kontaktu jest równa zero, co powoduje, że składowe równoległa i ortoogonalna do płasz-czyzny są równe zero
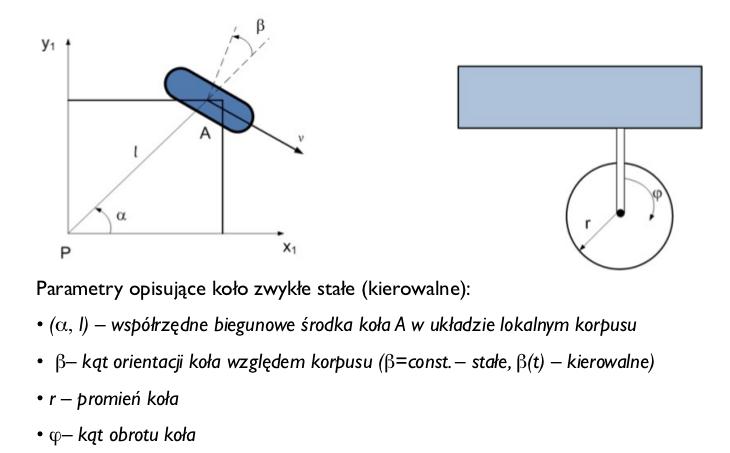
Koło stałe: środek koła A jest punktem stałym w układzie związanym z robotem i opisanym przez współrzędne biegunowe l oraz .
Koło orientowalne (kierowalne) względem środka: ruch płaszczyzny koła względem układu współ-rzędnych robota jest obrotem wokół osi pionowej przechodzącej przez środek koła.
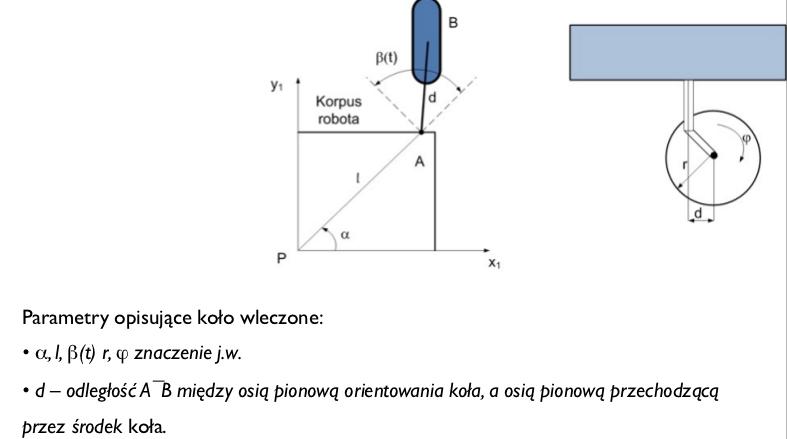
Koło orientowalne mimośródowo - samonastawne: środek koła jest w punkcie B, oś obrotu koła przechodzi przez punkt A.
Koło szwedzkie: możliwy jest ruch koła w dowolny kierunku, tzw. koło wielokierunkowe; tylko jedna składowa prędkości punktu kontaktu z podłożem jest równa zero.
Koła swobodne, szwedzkie i sferyczne nie wprowadzają ograniczeń (więzów) kinematycznych dla nadwozia pojazdu czyli korpusu robota mobilnego. Tylko koła zwykłe: stałe i kierowalne mają wpływ na kinematykę robota.
(tu wzory na więzy kinematyczne oraz stopień mobilności robota)
7. Roboty kroczące
Ruch maszyny kroczącej jest opisany poprzez sekwencję punktów kontaktu kończyn z podłożem. Sposobem lokomocji maszyn kroczących jest chód - ciąg zdarzeń podnoszenia i opuszczenia każdej z nóg. Dla robota kroczącego o k nogach, możliwa liczba zdarzeń N jest równa: N = (2k 1)!
7.1. Podział maszyn
Ze wględu na rodzaj stabilności ruchu
— statycznie stabilne - mają dużo aktywnych stopni swobody, ich postura (konfiguracja) jest stała, ruch opisywany jest za pomocą metod kinematycznych
— quasi-statycznie stabilne - w porównaniu z pierwszą grupą, mają mniejszą liczbę stopni swobody, pomiędzy statycznie stabilnymi fazami ruchu występują fazy utraty stabilności statycznej, maszyna nie przewraca się - zachowana jest stabilność dynamiczna (tylko w krótkim czasie)
— dynamicznie stabilne - mają od kilku do kilkudziesięciu stopni swobody, cechują się ciągle zmienną konfiguracją (posturą), wynikiem zmian konfiguracji jest, stabilny dynamicznie, ruch postępowy maszyny
27
Ze względu na liczbę nóg:
— jednonożne (monopedy) - maszyny skaczące, typu odwrócone wahadło, w celu zachowania rów-nowagi, maszyna musi być dynamicznie stabilna
— dwunożne (bipedy) - chodzące, skaczące, w tym maszyny humanoidalne, o dużych stopach (sta-bilne quasi-statycznie) albo maszyny stabilne dynamicznie (robot HONDA)
— czteronożne - zazwyczaj nogi przypominają kończyny owadów, istnieją także urządzenia, których nogi są odwzorowaniem kończyn czworonogów (ssaków, płazów, gadów)
— sześcionożne - z założenia przypominają owady, zarówno posturą kończyn jak i statycznym spo-sobem chodu
— wielonożne - składające się z wielu segmentów ciała wyposażonych w nogi, poruszają się podobnie jak stonogi, maszyny te są stabilne statycznie
7.2. Chód
Klasyfikacja i opisy typów chodu wynikają z obserwacji sposobów chodu zwierząt. Podstawo-wym wyróżnikiem chodu jest kolejność przestawiania nóg. Zasadniczym problemem w przypadku wielonożnych maszyn kroczących jest koordynacja ruchu nóg. Chody dzielą się na:
— symetryczne - współczynniki obciążenia nóg są identyczne, a nogi w parach (przedniej lub tylnej albo lewej i prawe) mają fazy różniące się o 0.5
— asymetryczne - współczynniki obciążenia nóg i ich fazy względne mogą być różne
Rodzaje chodu
Chód periodyczny (okresowy, rytmiczny) - chód, w którym stale jest powtarzana sekwencja prze-stawień nóg. Zwierzęta wybierają ten rodzaj chodu, gdy nie ma zmian prędkości ruchu, a na podłożu nie ma przeszkód.
Chód swobodny - na bieżąco jest wybierana noga, która będzie przenoszona, następuje to w zależ-ności od warunków zewnętrznych
Bieg (np. galop, trucht, kłus) - grupa chodów o współczynnikach obciążenia mniejszych od 0.5 Chód spacerowy (stęp) - grupa chodów o współczynnikach obciążenia większych lub równych od
0.5. W tych chodach są chwile, gdy z podłożem styka się więcej niż jedna noga.
Terminy stosowane przy opisie chodu
Okres chodu - czas wykonania jednej sekwencji przestawienia nóg
Współczynnik obciążenia - czas styku nogi z podłożem znormalizowany względem okresu chodu Faza względna - znormalizowany (do okresu chodu) przedział czasu od początku okresu do po-
stawienia określonej nogi (lub znormalizowany przedział czasu od postawienia wybranej nogi do chwili postawienia innej, wybranej nogi)
Faza przenoszenia (protrakcja) - faza przenoszenia nogi do przodu względem korpusu
Faza podparcia (retrakcja) - noga dotyka terenu i pcha korpus do przodu (koniec nogi przemieszcza się względem korpusu); jest to faza napędzająca ruch
Zalety maszyn kroczących
— adaptacja i manewrowalność w zróżnicowanym (nierównym) terenie
— możliwość pokonywania przeszkód (dziury, nierówności)
— potencjalna możliwość manipulowania obiektami za pomocą kończyn (np. owady)
Wady maszyn kroczących
— skomplikowana budowa mechaniczna
— duże zapotrzebowanie na energię (wiele napędów)
— złożony układ sterowania
28
7.3. Chód statyczny
Głównym kryterium sterowania w chodzie statycznym jest to, aby sterowany robot był statycznie stabilny, czyli zatrzymany w dowolnych momencie ruchu utrzyma równowagę. Wymaga to spełnienia pewnych kryteriów sterowania tak, aby robot nie przewrócił się.
Jednym z warunków jest to, aby poruszał się z niewielką prędkością tak, aby ewentualne siły bezwładności nie spowodowały utraty równowagi w momencie zatrzymania.
Ponadto środek ciężkości robota musi być utrzymany wewnątrz obszaru podparcia. Obszar ten tworzy odpowiednio:
— najmniejszy wielokąt zawierający powierzchnię, na której leżą stopy robota w momencie, gdy obie dotykają podłoża (faza podwójnego podparcia)
— powierzchnia stopy w czasie, gdy tylko jedna z nich ma kontakt z podłożem (faza pojedynczego
podparcia)
Chód statyczny determinuje elementy konstrukcji robota: dużą powierzchnię stóp, co pociąga za sobą konieczność zastosowania napędów o większej mocy w kostkach, w związku ze zwiększoną masą elementów. Został on porzucony przez badaczy na rzecz chodu dynamicznego.
7.4. Chód dynamiczny
Zgodnie z teorią chodu dynamicznego, środek ciężkości robota nie musi znajdować się w obszarze podparcia, przy zachowaniu warunku, że ZMP będzie w tym obszarze. Kryterium to zostało użyte w niniejszej pracy do stworzenia algorytmu kontroli chodu robota. Opisując chód robota za pomocą tej metody, mamy do czynienia z dwoma zagadnieniami: kontrola równowagi oraz sterowanie sekwencją chodu.
Pierwsze z nich zajmuje się takim obliczeniem ZMP, aby znajdowało się wewnątrz obszaru pod-parcia. W tym celu używa się regulatora, który minimalizuje odchylenie faktycznej wartości ZMP od wzorcowej.
Drugie z zagadnień, sterowanie sekwencją chodu, sprowadza się do wyznaczenia trajektorii stóp, biodra oraz na zapewnieniu synchronizacji między nimi. Przykładowo, aby umożliwić robotowi chód po zróżnicowanym terenie, należy najpierw wyznaczyć trajektorię obu stóp, a następnie trajektorię biodra. Podczas wyznaczania trajektorii, przejścia między fazami pojedynczego i podwójnego podparcia muszą być płynne. Dzięki temu uzyskuje się stabilny i szybki chód robota.
Pojęcie ZMP (zero moment point) oznacza punkt na podłożu, w którym suma momentów pędu wynosi zero. Zastosowanie teorii ZMP pozwala na przeniesienie środka ciężkości robota kroczącego poza obszar podparcia; utrzymanie równowagi jest wówczas uwarunkowane zachowaniem punktu momentu zerowego wewnątrz tego obszaru.
Bibliografia
wykłady z platformy http://rab.ict.pwr.wroc.pl/~arent/rr/mpr/ http://pl.wikipedia.org/wiki/Global_Positioning_System http://ep.com.pl/files/2846.pdf (artykuł o I2C) http://pl.wikipedia.org/wiki/Zigbee http://pl.wikipedia.org/wiki/Bluetooth
http://r.pawliczek.po.opole.pl/dydaktyka/mtr_05.pdf (wykład o czujnikach) http://pl.wikipedia.org/wiki/Enkoder_przyrostowy
29
Wyszukiwarka
Podobne podstrony:
opracowanie PSR
Opracowanka, warunkowanie
OPRACOWANIE FORMALNE ZBIORÓW W BIBLIOTECE (książka,
postepowanie w sprawach chorob zawodowych opracowanie zg znp
opracowanie 7T#2
opracowanie testu
Opracowanie FINAL miniaturka id Nieznany
Opracowanie dokumentacji powypadkowej BHP w firmie
przetworniki II opracowane
Opracowanie Programowanie liniowe metoda sympleks
Nasze opracowanie pytań 1 40
haran egzamin opracowane pytania
201 Czy wiesz jak opracować różne formy pisemnych wypowied…id 26951
IE opracowanie 2013r dr J Barcik