1. Linie
wpŇāywowe ‚Äď definicja
2. Linie
wpŇāywowe siŇā ‚Äď metoda statyczna, konstrukcje wyznaczalne,
procedura
obliczeniowa.
3.
WzajemnoŇõńá reakcji i przemieszczeŇĄ ‚Äď zasada Rayleigh.
4.
WzajemnoŇõńá przemieszczeŇĄ ‚Äď twierdzenie Maxwella.
5. Linie
wpŇāywowe wielkoŇõci statycznych ‚Äď metoda kinematyczna,
konstrukcje
wyznaczalne,
procedura
obliczeniowa.
6. Linie
wpŇāywowe przemieszczeŇĄ ‚Äď metoda kinematyczna,
konstrukcje
wyznaczalne, procedura
obliczeniowa.
7.
Wyznaczanie wielkoŇõci statycznych za pomocńÖ wykres√≥w linii
wpŇāywowych,
ukŇāady statycznie
wyznaczalne.
8.
Obwiednia momentu zginajńÖcego.
9.
Kratownica, definicja, zaŇāozenia ksztaŇātowania kratownic.
10.
Metody wyznaczania siŇā w prńôtach kratownic.
11.
Stopnie swobody w ukŇāadzie dwuwymiarowym.
12.
ZmiennoŇõńá geometryczna ukŇāadu.
13.
ZmiennoŇõńá chwilowa ukŇāadu.
14.
Przemieszczenia wńôzŇā√≥w konstrukcji. Wz√≥r Maxwella ‚Äď Mohra.
15.
Wińôzy warunkowo i bezwarunkowo.
16.
Wzory okreŇõlajńÖce stopieŇĄ statycznej niewyznaczalnoŇõci ukŇāadu.
17.
WŇāasciwosci ukŇāad√≥w z nadliczbowymi wiezami.
18.
Og√≥lne zaŇāoŇľenia metody siŇā.
19.
Metoda siŇā. Obciazenia statyczne.
20.
Metoda siŇā. Obciazenia termiczne.
21.
Metoda siŇā. Obciazenia kinematyczne.
22.
Metoda siŇā. WpŇāyw siŇā osiowych.
23.
Metoda siŇā. Podatnosc podp√≥r.
24.
Ruszty.
25.
Symetria i antysymetria.
26.
Og√≥lne zaŇāozenia metody przemieszczen.
27.
Stopien kinematycznej niewyznaczalnosci.
28. Plan
odksztaŇācen Ňāancucha kinematycznego.
29.
Wykresy podstawowe metody przemieszczen.
30.
Metoda przemieszczen. Obciazen termiczne.
31.
Metoda przemieszczen. Obciazenia osiowe.
32.
Metoda przemieszczen. Podatnosc podpór.
33.
Linie wpŇāywowe siŇā ‚Äď konstrukcje niewyznaczalne. Metoda
statyczna,
procedura obliczeniowa.
34.
Linie wpŇāywowe siŇā ‚Äď konstrukcje niewyznaczalne. Metoda
kinematyczna,
procedura
obliczeniowa.
35.
Linie wpŇāywowe przemieszczen ‚Äď konstrukcje niewyznaczalne.
Metoda
kinematyczna, procedura
obliczeniowa.
36.
Metoda Crossa. Og√≥lne zaŇāozenia, wsp√≥Ňāczynniki wejsciowe,
procedura
obliczeniowa.
37.
Teoria II rzedu.
38.
R√≥wnanie r√≥zniczkowe preta sciskanego siŇā osiowa oraz jego
rozwiazanie.
39. SiŇāa
krytyczna.
40.
Wzory transformacyjne do obliczenia moment√≥w wezŇāowych w
pretach
sciskanych osiowo.
41.
R√≥wnanie ukŇāadu drgajacego o 1 stopniu swobody oraz jego
rozwiazanie.
42. Wzór
Geigera.
43.
R√≥wnanie ukŇāadu drgajacego o 1 stopniu swobody poddanego
dziaŇāaniu
obciazen wymuszajacych.
44.
R√≥wnanie tŇāumionego ukŇāadu drgajacego o 1 stopniu swobody
oraz
jego rozwińÖzanie.
JeŇľeli
siŇāa znajdzie sińô po prawej stronie przekroju to rozpatrujńÖc
wartoŇõńá
r√≥wnowagi dla lewej czńôŇõci belki otrzymujemy
T
őĪ-
őĪP
=
RB = x/l
ZwińÖzek
ten jest sŇāuszny dla x>0.
7.
Wyznaczanie wielkoŇõci statycznych za pomocńÖ
wykresów
linii wpŇāywowych, ukŇāady statycznie
wyznaczalne.
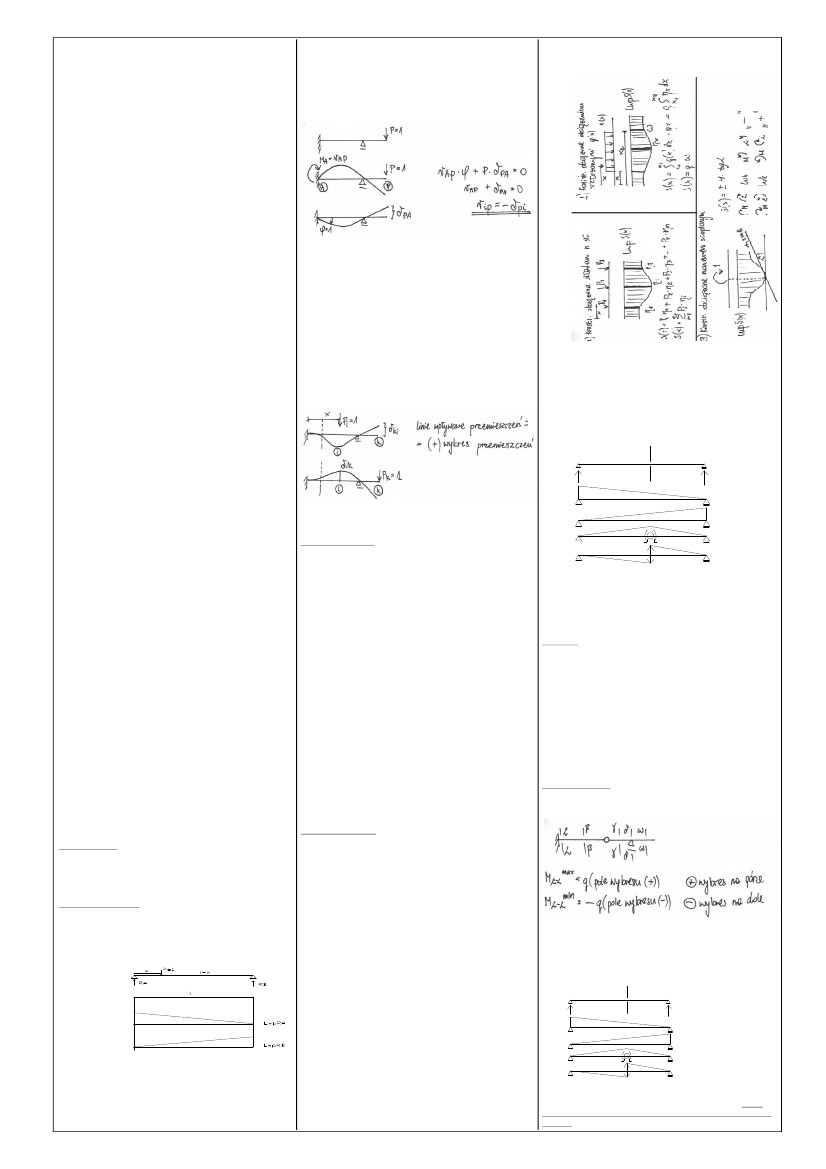
3.
WzajemnoŇõńá reakcji i przemieszczeŇĄ ‚Äď zasada
Rayleigh.
UkŇāad
sprńôŇľysty obcińÖŇľony siŇāńÖ P:
ZaleŇľnoŇõńá
moŇľna sformuŇāowańá nastńôpujńÖco: reakcja wńôzŇāa ‚Äěi‚ÄĚ ukŇāadu
sprńôŇľystego,
spowodowana dziaŇāaniem siŇāy uog√≥lnionej r√≥wnej
jednoŇõci
jest r√≥wna co do wartoŇõci bezwzglńôdnej, lecz odwrotna co
do
znaku- przemieszczeniu na kierunku dziaŇāania powyŇľszej siŇāy
spowodowanemu
przemieszczeniem o jednoŇõńá wzdŇāuŇľ linii dziaŇāania
reakcji
wińôzu ‚Äěi‚ÄĚ. Gdy siŇāa P=1 przemieszcza sińô po konstrukcji
zachowujńÖc
nie zmienny kierunek to zbi√≥r wartoŇõci rIp
przedstawia
linińô
wpŇāywowńÖ reakcji wińôzu ‚Äěi‚ÄĚ. Linia wpŇāywowa dowolnej siŇāy
pokrywa
sińô z wykresem przemieszczeŇĄ wywoŇāanych jednostkowym
przemieszczeniem
wzdŇāuŇľ kierunku dziaŇāania odpowiedniego wińôzu.
4.
WzajemnoŇõńá przemieszczeŇĄ ‚Äď twierdzenie
Maxwella.
Przemieszczenie
őīik
odpowiadajńÖce
i-tej
sile
(w kierunku tej siŇāy) i
wywoŇāane
dziaŇāaniem siŇāy Pk=1,
równe
jest przemieszczeniu őīki,
odpowiadajńÖcemu
k-tej
sile
i wywoŇāanemu przez dziaŇāanie
jednostkowej
siŇāy Pi=1
Styczna
poprowadzona w punkcie przyŇāoŇľenia momentu M do
wykresu
lwpS(x).
Takie
same zwroty momentu i kńÖta nachylenia stycznej: + we wzorze
Przeciwne
zwroty: - we wzorze
Linie
wpŇāywowe moŇľna budowańá 2 metodami:
-
metodńÖ statycznńÖ (r√≥wnania r√≥wnowagi)//pyt. 2
-
metodńÖ kinematycznńÖ (odksztaŇācenia):// pyt. 5 i 6
(tu
ze ŇõcińÖgi
z
worda, nie wiem, czy to dobrze): Liczymy wielkoŇõci
statyczne
RA
,
RB
,
MőĪ-őĪ
,
T őĪ-őĪ
a-a
Ra
a-a
Rb
lwpRa
5.
Linie wpŇāywowe wielkoŇõci statycznych ‚Äď
metoda
kinematyczna, konstrukcje wyznaczalne,
procedura
obliczeniowa
Metoda
kinematyczna ‚Äď polega na sporzńÖdzeniu linii wpŇāywowych
przemieszczeŇĄ
wg zasady wzajemnoŇõci przemieszczeŇĄ w ukŇāadzie
sprńôŇľystym.
Sposób
kinematyczny sporzńÖdzania linii wpŇāywu wielkoŇõci
statycznych
polega na wykorzystaniu twierdzenia o wzajemnoŇõci
reakcji
i przemieszczeŇĄ (tw. Reyleigha) kt√≥re brzmi: Reakcja rji w
punkcie
‚Äěj‚ÄĚ wywoŇāana siŇāńÖ jednostkowńÖ dziaŇāajńÖcńÖ w punkcie ‚Äěi‚ÄĚ
jest
równa
co do wartoŇõci i r√≥Ňľna co do znaku przemieszczeniu őīij
w
punkcie
i na kierunku dziaŇāania siŇāy wywoŇāanemu przemieszczeniem
jednostkowym
zdanym w punkcie j na kierunku reakcji. rji=- őīij
Tok
postńôpowaniu przy budowie linii wpŇāywowych siŇā na podstawie
zasady
wzajemnoŇõci reakcji i przemieszczeŇĄ dla dowolnego ukŇāadu
sprńôŇľystego
moŇľemy w skr√≥cie ujńÖńá w nastńôpujńÖcych punktach:
a)zwalniamy
wińôŇļ warunkujńÖcy wystńôpowanie tej siŇāy, kt√≥rej linińô
wpŇāywowńÖ
budujemy;
b)
wykonujemy (wymuszamy) przemieszczenie o jednoŇõńá na
kierunku
dziaŇāania odrzuconego wińôzu;
c)wykres
przemieszczeŇĄ (ŇõciŇõlej rzut√≥w przemieszczeŇĄ na kierunki
dziaŇāania
obcińÖŇľenia ‚ÄĒ zwykle pionowego lub poziomego) punkt√≥w
rozpatrywanej
konstrukcji, w kt√≥rych moŇľe byńá przyŇāoŇľone
obcińÖŇľenie,
traktujemy jako poszukiwanńÖ linińô wpŇāywowńÖ .
d)
Znaki rzńôdnych ustalamy zgodnie z zasadńÖ Rayleigh‚Äôa : rip = ‚ÄĒ
őīpi.
lwpRb
lwpMa-a
lwpTa-a
8.
Obwiednia momentu zginajńÖcego.
MajńÖc
wartoŇõci wielkoŇõci statycznych kaŇľdego rozpatrywanego
przekroju
konstrukcji, moŇľemy wybrańá spoŇõr√≥d nich ekstremalne
wartoŇõci
dla kaŇľdego przekroju i sporzńÖdzińá na tej podstawie
obwiednińô
danej wielkoŇõci.
Obwiednia
‚Äď obszar, w kt√≥rym mieszczńÖ sińô wykresy moŇľliwych
wartoŇõci
danych wielkoŇõci Q ograniczone dwiema liniami.
Wizualizuje
jaka moŇľe byńá najwińôksza wartoŇõńá moment√≥w po stronie
wŇā√≥kien
górnych jak i dolnych.
(Dysponowanie
wartoŇõciami wielkoŇõci statycznej dla kaŇľdego
rozpatrywanego
przekroju (punktu) konstrukcji umoŇľliwia wyb√≥r
spoŇõr√≥d
nich ekstremalnych wartoŇõci dla kaŇľdego miejsca i
sporzńÖdzenie
na tej podstawie tzw. obwiedni danej wielkoŇõci. Jest to
wykres
w postaci dwu linii ograniczajńÖcych obszar, w kt√≥rym
mieszczńÖ
sińô wykresy moŇľliwe ( dla rozpatrywanych wariant√≥w
obcińÖŇľenia)
wartoŇõci danej wielkoŇõci Q. Odcińôtymi tego wykresu sńÖ
odcińôte
kolejnych rozpatrywanych punktów (przekrojów) konstrukcji,
rzńôdnymi
‚Äď wspomniane wartoŇõci ekstremalne)
Procedura
dziaŇāania:
‚ÄĘ zaznaczamy
przekroje na belce, dla kt√≥rych obliczane bńôdńÖ wartoŇõci
maksymalnych
moment√≥w zginajńÖcych w wyniku obcińÖŇľenia belki
obcińÖŇľeniem
cińÖgŇāym o natńôŇľeniu q.
1.
Linie wpŇāywowe ‚Äď definicja
Jest
to wykres przedstawiajńÖcy zaleŇľnoŇõńá pomińôdzy wartoŇõcińÖ pewnej
wielkoŇõci
statycznej a poŇāoŇľeniem obcińÖŇľenia statycznego
(skupionego,
cińÖgŇāego, momentu), wywoŇāujńÖcego tńô wartoŇõńá. SŇāuŇľy
do
okreŇõlania wielkoŇõci siŇā wewnńôtrznych lub przemieszczeŇĄ pod
wpŇāywem
dowolnego obcińÖŇľenia jednostkowego, w dowolnym
przekroju.
2.
Linie wpŇāywowe siŇā ‚Äď metoda statyczna,
konstrukcje
wyznaczalne, procedura
obliczeniowa.
Aby
okreŇõlińá linińô wpŇāywowńÖ wielkoŇõci statycznej ukŇāadamy
równanie
wielkoŇõci statycznej S z funkcji x. S=f(x). X- okreŇõla
poŇāoŇľenie
siŇāy P=1 na konstrukcji.
Metoda
statyczna ‚Äď polega na okreŇõleniu danej wielkoŇõci w spos√≥b
analityczny
i oparty na równaniach statycznych. Dla uproszczenia
zapisu
w r√≥wnaniach okreŇõlajńÖcych rzńôdne linii wpŇāywowych
dodolnych
wielkoŇõci S, stosuje sińô uproszczenie:
S=….
zamiast ő∑s=‚Ķ.;
Ra=‚Ķ‚Ķ., zamiast ő∑Ra
=
…..
Procedura
obliczeniowa
‚ÄĘ reakcja
podporowa: SiŇāńô P =1 ustawiamy w dowolnej odlegŇāoŇõci , x
od
podpory A. Z r√≥wnania ‚ąĎMB=0
znajdujemy RA
*l
‚Äď P*(l-x)=0 .
PodstawiajńÖc
x=0 otrzymujemy RA=1,
analogicznie postńôpujemy
przy
linii wpŇāywowej r√≥wnej RB,
tylko korzystamy z równania
‚ąĎMA=0
6.
Linie wpŇāywowe przemieszczeŇĄ ‚Äď metoda
kinematyczna,
konstrukcje wyznaczalne,
procedura
obliczeniowa.
Metoda
kinematyczna ‚Äď polega na sporzńÖdzeniu linii wpŇāywowych
przemieszczeŇĄ
wg zasady wzajemnoŇõci przemieszczeŇĄ w ukŇāadzie
sprńôŇľystym.
Sposób
kinematyczny sporzńÖdzania linii wpŇāywu wielkoŇõci
statycznych
polega na wykorzystaniu twierdzenia o wzajemnoŇõci
reakcji
i przemieszczeŇĄ (tw. Reyleigha) kt√≥re brzmi: Reakcja rji w
punkcie
‚Äěj‚ÄĚ wywoŇāana siŇāńÖ jednostkowńÖ dziaŇāajńÖcńÖ w punkcie ‚Äěi‚ÄĚ
jest
równa
co do wartoŇõci i r√≥Ňľna co do znaku przemieszczeniu őīij
w
punkcie
i na kierunku dziaŇāania siŇāy wywoŇāanemu przemieszczeniem
jednostkowym
zdanym w punkcie j na kierunku reakcji. rji=- őīij
Tok
postńôpowania:
1)
obcińÖŇľamy konstrukcjńô reakcjńÖ R=1 lub momentem M=1 na
kierunku
przemieszczenia, dla kt√≥rego lwp jest sporzńÖdzana
2)
rysujemy wykres przemieszczeŇĄ reakcji R=1 lub M=1. Otrzymany
wykres
jest linińÖ wpŇāywowńÖ przemieszczenia.
‚ÄĘ Im
wińôcej przekroj√≥w, tym dokŇāadniejszńÖ obwiednińô otrzymamy.
Standardowo
przekroje robimy w podporach i w poŇāowie dŇāugoŇõci
przńôseŇā.
Nie robimy w przegubach, gdyŇľ moment w przegubie jest
=0.
‚ÄĘ W
zaznaczonych przekrojach rysujemy linie wpŇāywowe moment√≥w
‚ÄĘ obliczamy
wartoŇõci moment√≥w maksymalnych i minimalnych w
kaŇľdym
z przekrojów:
a-a
Ra
a-a
Rb
lwpRa
lwpRb
‚ÄĘ SiŇāa
poprzeczna TőĪ-őĪ
Gdy
siŇāa znajduje sińô na lewo od przekroju őĪ-őĪ
to
‚ąĎY=0
dla
prawej
strony
i otrzymujemy równanie:
T
őĪ-
őĪ
L
=
RA ‚Äď P = ‚Äďx/l = -RB
Jest
to r√≥wnanie jednej gaŇāńôzi linii wpŇāywowej prawdziwe dla x<a.
PodstawiajńÖc
x=0, x=1 kreŇõlimy czńôŇõńá linii wpŇāywu TőĪ- őĪ
tylko
z
lewej
strony przekroju őĪ-
őĪ.
lwpMa-a
lwpTa-a
Ostatecznie
na jeden wykres nanosimy wartoŇõci maksymalne i
minimalne,
wyliczone jak wyŇľej dla kolejnych przekroj√≥w. Jest to
wykres
obwiedni moment√≥w zginajńÖcych pod dziaŇāaniem obcińÖŇľenia
cińÖgŇāego.
9.
Kratownica, definicja, zaŇāoŇľenia ksztaŇātowania
kratownic.
Jest
to niezmienny ukŇāad prostoliniowych prńôt√≥w, poŇāńÖczonych ze
sobńÖ
w wńôzŇāach wsp√≥ŇāŇõrodkowo przegubami idealnymi (brak tarcia),
przeguby
pracujńÖ tylko na siŇāy osiowe.
ZaŇāoŇľenia:
-
prńôty sńÖ prostoliniowe i poŇāńÖczone wsp√≥ŇāŇõrodkowo w wńôzŇāach
-
w przegubach nie ma tarcia
-
konstrukcja jest niezmienna geometrycznie i chwilowo
-
wszystkie obcińÖŇľenia zewnńôtrzne oraz cińôŇľar wŇāasny
przekazywane
sńÖ
wyŇāńÖcznie w postaci siŇā skupionych przyŇāoŇľonych w wńôzŇāach
8)
W konstrukcjach statycznie niewyznaczalnych mogńÖ byńá
realizowane
wstńôpne stany naprńôŇľenia, (ale tylko na kierunku wińôz√≥w
warunkowo
niezbńôdnych)
10.
Metody wyznaczania siŇā w prńôtach kratownic.
metoda
r√≥wnowaŇľenia wńôzŇā√≥w (analityczna):
‚ąĎX=0
;
‚ąĎY=0
Wady
metody:
1.
kolejnoŇõńá rozwińÖzywania jest zdeterminowana ukŇāadem prńôt√≥w,
2.
duŇľa liczba "rachunk√≥w"
3.
kratownica bez wńôzŇāa o 2 prńôtach nie moŇľe byńá "rńôcznie"
rozwińÖzana
metoda
Rittera (przekrojów)
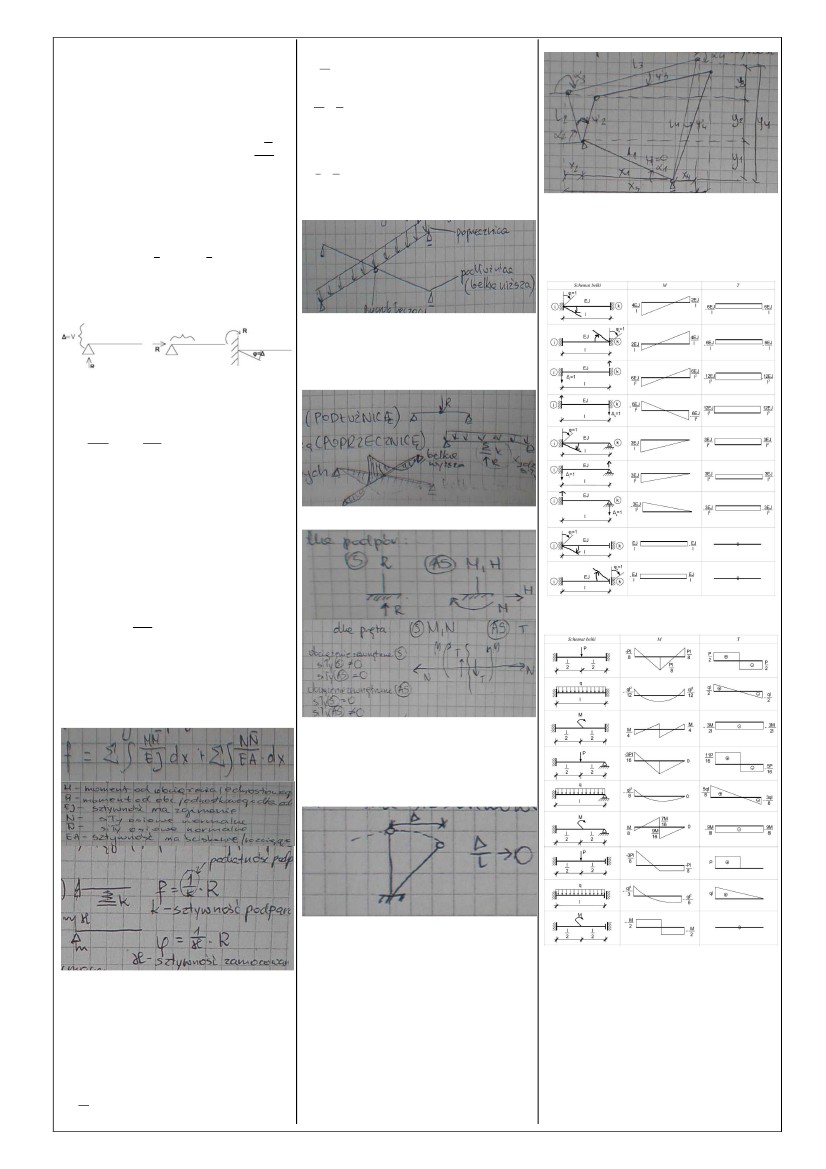
14.
Przemieszczenia wńôzŇā√≥w konstrukcji. Wz√≥r
Maxwella-Mohra.
+
‚ąę‚Ąē
=
‚ąę
‚ąô
+
‚ąę
+
‚ąę
‚ąÜ
‚ąô
+
+
‚ąę
‚ąô
‚ąô‚Ąē
+
‚ąô
‚ąí
‚ąÜ
9)
Liczba moŇľliwych wstńôpnych stan√≥w samo naprńôŇľenia dla danego
rodzaju
konstrukcji równa jest stopniowi statycznej
niewyznaczalnoŇõci
10)
SiŇāy w wińôzach warunkowo niezbńôdnych sńÖ zaleŇľne od
sztywnoŇõci
poszczeg√≥lnych elem. SztywnoŇõńá: EA- Ňõciskanie
i
rozcińÖganie,
EJ- zginanie GA-Ňõcinanie
11)
Wszystkie wińôzy warunkowo niezbńôdne wsp√≥ŇāpracujńÖ w
konstrukcji
ze sobńÖ (tzn. dziaŇāajńÖ na jedne kt√≥re oddziaŇāywajńÖ na inne
itd.)
12)
W miarńô przecińÖŇľania konstrukcji mogńÖ pojawińá sińô przeguby
plastyczne
powodujńÖce zmniejszenie stopnia statycznej
niewyznaczalnoŇõci
18.
Og√≥lne zaŇāoŇľenia metody siŇā:
Metoda
siŇā jest sposobem rozwińÖzywania ukŇāad√≥w statycznie
niewyznaczalnych,
czyli ukŇāad√≥w o nadliczbowych wińôzach
(zewnńôtrznych
i wewnńôtrznych). Sprowadza sińô ona do rozwińÖzania
ukŇāadu
statycznie wyznaczalnego (ukŇāad podstawowy w metodzie siŇā),
który
powstaje z niewyznaczalnego ukŇāadu rzeczywistego przez
wprowadzenie
w miejsce odrzuconych wińôz√≥w niewiadomych siŇā. Jest
to
prosty spos√≥b na rozwińÖzanie ukŇāad√≥w ramowych, kratowych czy
Ňāukowych.
W niniejszym rozdziale om√≥wione zostanńÖ og√≥lne
zaŇāoŇľenia
oraz tok postńôpowania obliczeniowego w metodzie siŇā.
Istota
metody opiera sińô na pozbawieniu rozpatrywanego,
obcińÖŇľonego
ukŇāadu nadliczbowych wińôz√≥w, dbajńÖc jednak przy tym o
to,
aby pozostaŇā on geometrycznie niezmienny. W miejsce myŇõlowo
usunińôtych
wińôz√≥w wstawiamy niewiadome siŇāy. Nastńôpnie, aby
zachowańá
kinematycznńÖ identycznoŇõńá ukŇāadu rzeczywistego z nowym,
nazywanym
dalej ukŇāadem podstawowym w metodzie siŇā, okreŇõlamy
sumaryczne
przemieszczenia po kierunkach dziaŇāania tych siŇā.
PoniewaŇľ
w rzeczywistoŇõci w tych miejscach istniaŇāy wińôzy,
przemieszczenia
te sńÖ r√≥wne zero. UkŇāadajńÖc te warunki w r√≥wnania
otrzymujemy
wyznaczalny ukŇāad, a zatem moŇľemy obliczyńá wartoŇõci
nadliczbowych
niewiadomych.
1)
OkreŇõlamy stopieŇĄ statycznej niewyznaczalnoŇõci ns
2)
Usuwamy tyle wińôz√≥w warunkowo niezbńôdnych (nadliczbowych)
ile
wynosi ns
tak,
aby konstrukcja pozostaŇāa ukŇāadem niezmiennym i
otrzymujemy
schemat statycznie wyznaczalny.
3)
UkŇāad obcińÖŇľamy obcińÖŇľeniem zewnńôtrznym oraz siŇāami
jednostkowymi
na kierunku usunińôtych wińôz√≥w.
4)
Wyznaczamy sumaryczne przemieszczenia (przesunińôcia lub
obroty)
na kierunkach dziaŇāania siŇā nadliczbowych (rysujemy
wykresy
moment√≥w i obliczamy őī)
5)
RozwińÖzujemy ukŇāad r√≥wnaŇĄ kanonicznych
6)
Opracowujemy koŇĄcowe wyniki (przemnaŇľamy wykresy
momentów
od obc. jednostkowych na kierunkach usunińôtych wńôzŇā√≥w
podporowych
przez wyniki rozwińÖzaŇĄ ukŇāad√≥w r√≥wnaŇĄ i sumujemy
je)
M=M1
x1+M2
x2+…
+MP.
obcińÖŇľenia
statyczne:
(4,5
czŇāon) wpŇāyw obc. termicznych; (6,7) wpŇāyw podpory podatnej;
(8)
wpŇāyw obcińÖŇľenia kinematycznego ‚Äď przemieszczenia
EJ/EA/GA-sztywnoŇõńá
na zginanie/Ňõcikanie(rozcińÖganie)/Ňõcinanie
M,N,T‚ÄďsiŇāy
przekrojowe od obcińÖŇľeŇĄ jednostkowychM,
N, T ‚Äď
siŇāy przekrojowe od obc. jednostkowego wstawionego wmiejscu i
kierunku w jakim chcemy obl. odksztaŇācenie.
Ri-(6)-siŇāa
w podporze podatnej; (8)- siŇāa od obc. jednostkowego na- przecińôcie
kratownicy przez 3 prńôty nie schodzńÖce sińô w jednym
kierunku
reakcjiwńôŇļle
-
z r√≥wnaŇĄ r√≥wnowagi: ‚ąĎX=0
;
‚ąĎY=0
;
‚ąĎMi=0
obliczamy wartoŇõci w Mi
‚Äď
moment na podporze podatnej
Ri
‚Äď
siŇāa od obcińÖŇľenia jednostkowego w podporzeprńôtach
Mp
‚Äď
moment od obcińÖŇľenia momentem w podporze
¬Ķ-
wsp.
zaleŇľny od ksztaŇātu przekroju poprzecznego prńôtaMetoda Henneberga
(wymiana prńôt√≥w) :
-Polega
na usunińôciu jednego prńôta i wstawieniu go gdzie indziej, ale őĪt-
wsp.
rozszerzalnoŇõci termicznej
t-Ňõrednia
zmiana temp. w osi prńôtaw ten spos√≥b, Ňľeby
zachowana
byŇāa nadal geometryczna
‚ąÜt-r√≥Ňľnica
temperaturniezmiennoŇõńá.
k-sprńôŇľystoŇõńá
podparcia liniowego-Zabieg ten ma na celu wyŇāapania wińôzu, od
kt√≥rego moŇľna by byŇāo#-podatnoŇõńá
podpory
sprńôŇľyŇõcie zamocowanej (1/ #)
rozpoczńÖńá
obliczenia analityczne.
h-wysokoŇõńá
przekroju poprzecznego prńôta-Po przestawieniu jednego prńôta naleŇľy
skorzystańá z zasady
superpozycji:
najpierw obliczyńá caŇāńÖ kratńô dla obcińÖŇľeŇĄ zewnńôtrznych
‚ąÜ-przemieszczenia
P,
zaniedbujńÖc siŇāńô x powstaŇāńÖ w wyniku usunińôcia prńôta, a
nastńôpnie
obliczyńá
kratńô tylko dla powstaŇāej siŇāy x.15.
Wińôzy warunkowo i bezwarunkowo
11.
Stopnie swobody w ukŇāadzie
dwuwymiarowym.
niezbńôdne:
Warunkowo
niezbńôdne-czyli takie kt√≥re moŇľemy usunńÖńá, zachowujńÖc
odpowiednie
warunki. SiŇāy w wińôzach warunkowo niezbńôdnych
zaleŇľńÖ
od: EA,GA,EJ ‚Äď sztywnoŇõńá na Ňõciskanie(rozcińÖganie),
Ňõcinanie,
zginanie
Bezwarunkowo
niezbńôdne- wińôzy kt√≥rych nie wolno usunńÖńá.
19.
Metoda siŇā. ObcińÖŇľenia statyczne.
16.
Wzory okreŇõlajńÖce stopieŇĄ statycznej
niewyznaczalnoŇõci
(liczbńô wińôz√≥w nadliczbowych
w
r√≥Ňľnego rodzaju konstrukcjach):
r-reakcje,
p-przeguby
p-
reakcje podporowe
+prńôty,
w- wńôzŇāy
3)
dla ram:ns=
r-3+3z-p1-2p2-…-npnr-reakcje,
z-obszary
zamknińôte,
p-przeguby (w zaleznoŇõci od krotnoŇõci)
T
‚Äď tarcze; S ‚Äď stopnie swobody; R ‚Äď przeguby; P - prńôty
1)
dla belki:
2)
dla kratownicy:
ns=
r-3-p
ns=
p-2w
-naleŇľy
obliczyńá stopieŇĄ statyczny niewyznaczalnoŇõci
-usuwamy
wńôzŇāy warunkowo niezbńôdne tyle ile jest r√≥wny stopieŇĄ
-obc.
siŇāami jednostkowymi w miejscu usunińôtych wńôzŇā√≥w
őī11x1+
őī12x2+‚ąÜ1P=0őī12=
őī21
őī21x1+
őī22x2+‚ąÜ1P=0
Wsp√≥Ňāczynniki
őī
i
‚ąÜ
okreŇõla
sińô za pomocńÖ wzoru Maxwella ‚Äď
Mohra.
Wynikowe
wartoŇõci moment√≥w zginajńÖce okreŇõla sińô wzorem
M=M1X1+M2X2+Mp
=
‚ąę
‚ąô
+
‚ąę
‚ąô
+
‚ąę
‚ąô‚Ąē
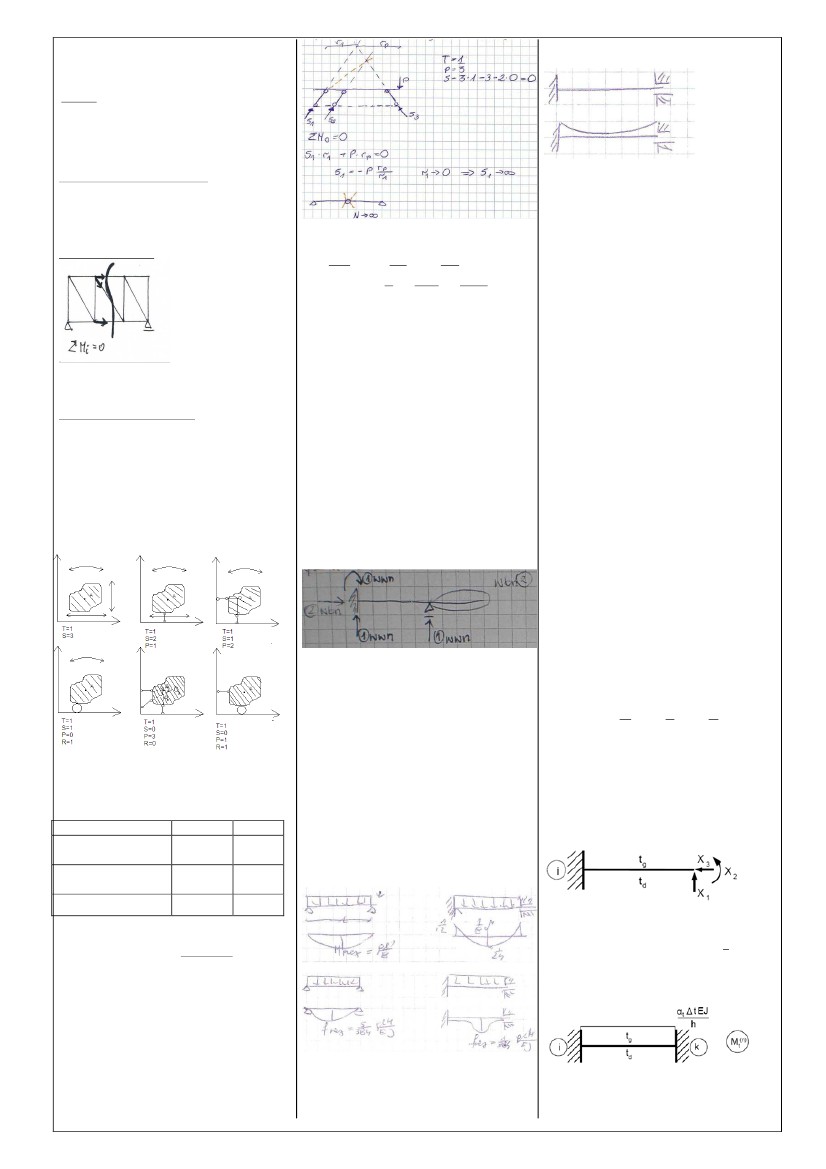
12.ZmiennoŇõńá
geometryczna ukŇāadu-
mechanizm staje
sińô
konstrukcjńÖ. UkŇāad jest niezmienny geometrycznie gdy speŇāniony
jest
warunek s=3T-P-2R‚ȧ0;T-tarcza,P-prńôty,s-stopieŇĄ swobodny, R-
przegub
(za maŇāo wińôz√≥w podporowych)
UkŇāadNieswobodny
Geometrycznie
niezmienny
(wńôzŇāy
nadliczbowe) ‚ÄďS<3
st.niewyznaczalny
Geometrycznie
niezmienny
(bez
wńôzŇā√≥w nadliczbowych) ‚ÄďS=3
st.wyznaczalny
Geometrycznie
zmienny -
s>3
mechanizm
ns=
-S
(s-
stopieŇĄ statycznej niewyznaczalnoŇõci)
Swobodny
S<0
17.
WŇāaŇõciwoŇõci ukŇāad√≥w z nadliczbowymi
wińôzami
1)
Wystarczy jeden wińÖz nadliczbowy by konstrukcja staŇāa sińô
statycznie
niewyznaczalna tzn. Ňľe
nie
moŇľemy jej rozwińÖzańá
wykorzystujńÖc
tylko równania równowagi.
2)
Do wyznaczenia siŇā w wińôzach bezwarunkowo niezbńôdnych
wystarczajńÖ
równania równowagi.
3)
SpeŇānienie wszystkich dowolnych warunk√≥w r√≥wnowagi przez
wszystkie
siŇāy wystńôpuje w ukŇāadach statycznie niewyznaczalnych
jest
warunkiem koniecznym, ale niewystarczajńÖcym dla
prawidŇāowoŇõci
rozwińÖzania.
4)
Wińôzy nadliczbowe redukujńÖ ekstremalne wartoŇõci sil
wewnńôtrznych
20.
Metoda siŇā. Obciazenia termiczne.
Przy
obliczaniu ukŇāad√≥w statycznie niewyznaczalnych naleŇľy
pamińôtańá,
Ňľe
obcińÖŇľenia
takie jak temperatura (ogrzanie
równomierne
i nierównomierne), osiadanie podpór (liniowe i
kńÖtowe),
czy teŇľ bŇāńôdy montaŇľowe wywoŇāujńÖ opr√≥cz przemieszczeŇĄ
konstrukcji
takŇľe siŇāy wewnńôtrzne.
-
nier√≥wnomierne ogrzanie (ozińôbienie) prńôta,
-
nier√≥wnomierne oddziaŇāywanie temp. Na prńôt
UkŇāad
podstawowy dla ukŇāadu obustronnie utwierdzonego:
S=0
s>0
13.ZmiennoŇõńá
chwilowa ukŇāadu-
Nastńôpuje gdy iloŇõńá
wńôzŇā√≥w
jest odpowiednia ale sńÖ one Ňļle
usytuowane.
Konstrukcja
ma prawo do chwilowego obrotu. UkŇāad dw√≥ch tarcz
przegubowo
poŇāńÖczonych w punkcie B i przymocowanych do ziemi
dwoma
nieprzesuwnymi przegubami A. koŇĄce prńôt√≥w AB i BC mogńÖ
sińô
przemieszczańá jedynie po okrńôgach k√≥Ňā o promieniach r i r1
co
w
pierwszym
przypadku jest niemoŇľliwe ze wzglńôdu na brak wsp√≥lnej
stycznej.
W przypadku zaŇõ drugim okrńôgi o promieniach r i r1
maja
wspólny
odcinek toru ‚Äď stycznńÖ w punkcie B. UkŇāady takie noszńÖ
nazwńô
ukŇāad√≥w zmiennych chwilowo
RYSUNEK
DALEJ--
5)
Wińôzy nadliczbowe redukujńÖ ekstremalne wartoŇõci przemieszczeŇĄ.
Schemat
podstawowy uzupeŇānia ukŇāad r√≥wnaŇĄ kanonicznych:
őī11x1+
őī12x2+
őī13x3+
őī
1t=0
őī21x1+
őī22x2+
őī23x3+
őī
2t=0
őī31x1+
őī32x2+
őī33x3+
őī
3t=0
‚ąÜWz√≥r
Maxwella-Mohra: &'(
=
‚ąę ‚Ąē+ ‚ąęt-Ňõrednia
zmiana temp. w osi prńôta
Wykres
moment√≥w w ukŇāadzie niewyznaczalnym jest po stronie
‚Äězimniejszej‚ÄĚ.
td>tg
Czyli
wykres momentu zginajńÖcego dla belki obustronnie
utwierdzonej
obcińÖŇľonej r√≥ŇľnicńÖ temperatur ‚ąÜt:
6)
UkŇāady statycznie niewyznaczalne, obcińÖŇľone w obszarach
wińôz√≥w
warunkowo niezbńôdnych z ukŇāadami samo r√≥wnowaŇľńÖcych
sińô
siŇā, nie pracujńÖ w obszarach wińôz√≥w bezwarunkowo niezbńôdnych.
7)
Konstrukcje statycznie niewyznaczalne sńÖ wraŇľliwe na obcińÖŇľenia
kinematyczne
lub termiczne (PowstajńÖ przemieszczenia i siŇāy
wewnńôtrzne),
ale tylko w obszarach wińôz√≥w warunkowo
niezbńôdnych.
21.Metoda
siŇā-obcińÖŇľenie kinematyczne
RozwińÖzujńÖc
metoda siŇā konstrukcje obcińÖŇľonńÖ obcińÖŇľeniem
kinematycznym
naleŇľy korzystańá z form wzoru Maxwella-Mohra
odpowiednich
dla danych wsp√≥Ňāczynnik√≥w.‚ąí‚ąÜRi-siŇāa
od obcińÖŇľenia na kierunku reakcji; ‚ąÜ-przemiesczenie
Równanie
kanoniczne bńôdńÖ sumami przemieszczen na kierunku
nadliczbowych
wińôz√≥w, z tym ze musza uwzglńôdniańá
przemieszczenia
(őīiőĪ),
kt√≥re wystńÖpiŇāy w ukŇāadzie podstawowym.
őī11X1+
őī12X2+
őī13X3+‚Ķ+
őī1nXn+‚ąÜi‚ąÜ=0
MM
dx
EJ
wymnaŇľajńÖc
odpowiednie pola wykres√≥w przez odpowiednie rzńôdne,
np.:
ä
21
to
suma przemnoŇľonych p√≥l z wykresu M1 przez
1)korzystamy
z
pierwszej cz. wzoru Maxwella-Mohra ‚ąĎ
‚ąę
)/
.
0
+,
*jest
szukanńÖ podatnoŇõcińÖ.
PosŇāugujemy
sińô teŇľ parametrem okreŇõlanym jako sztywnoŇõńá
podpory.
OkreŇõlamy w taki spos√≥b relacjńô mińôdzy siŇāńÖ a ugińôciem
podpory.
Jest to po prostu odwrotnoŇõńá podatnoŇõci.
f=
k=
)
2
*
3
4
/
PodstawowńÖ
cechńÖ ŇāaŇĄcucha kinematycznego jest jego ruchliwoŇõńá.
PosŇāugujemy
sińô r√≥wnaniami na oŇõ X i Y. Przyjmujemy jedno z
przemieszczeŇĄ
‚ąÜi=1
i wyliczamy Ōąi=‚ąÜi/l
Obliczamy zaleŇľnoŇõci
kńÖtowe
w ŇāaŇĄcuchu kinematycznym: ő£xiŌąi=0,
ő£yiŌąi=0
i wyliczamy
Ōąi.
WielkoŇõci przemieszczeŇĄ koŇĄc√≥w prńôta: ‚ąÜi=Ōąili
JeŇõli
przyŇāoŇľymy siŇāńô N=1
[N], to wyraŇľenie przeksztaŇāci sińô do
postaci:)
‚ąÜ)
=
+,Wynika
z tego, Ňľe
wyraŇľenie:
28.
Plan odksztaŇāceŇĄ ŇāaŇĄcucha kinematycznego.
odpowiadajńÖce
im rzńôdne z p√≥l wykresu M2*1/EJ
2)korzystamy
ze
wzoru kanonicznego met.siŇā
Ô£Ī√§
x
+
ä
x
+
‚ąÜÔ£ľ
Ô£ī 11
1 12 2
1P
=
0
Ô£ī
podstawiajńÖc
wartoŇõci i tworzńÖcÔ£≤Ô£ĹÔ£ī√§
21x1
+
ä
22
x2
+
‚ąÜ2
P
=
0Ô£īÔ£≥Ô£ĺ
ukŇāad
r√≥wnaŇĄ.
wykresu
Mi.
24.
Ruszty
‚ąÜ iP
=
- ‚ąĎ
R
¬ē
‚ąÜ ,gdzie
‚ąĎ
R
to
suma reakcji z
29.
Wykresy podstawowe metody przemieszczeŇĄ.
Zwrot
reakcji jest dodatni gdy dziaŇāa ona zgodnie z zaŇāoŇľonym
obcińÖŇľeniem.
Dla obc.kinem.Mp=0Rusztem nazywamy konstrukcjńô skŇāadajńÖca sińô z
podŇāuŇľnic i
poprzecznic.
KrzyŇľujńÖce sińô prńôty sńÖ ze sobńÖ poŇāńÖczone za pomocńÖ
przegubów.
ObcińÖŇľenie z podŇāuŇľnic przenosi sińô czńôŇõciowo na skraje
podpory
podŇāuŇľnic, czńôŇõciowo na dŇļwigar poprzeczny.
-
rozwińÖzujemy belkńô niŇľszńÖ (podŇāuŇľnicńô)
-
rozwińÖzujemy belkńô wyŇľszńÖ (poprzecznicńô)
3)RozwińÖzanie
ukŇāadu
daje wsp√≥Ňāczynniki Xi przez kt√≥re
-
rysujemy lwp
wymnaŇľamy
wykresy Mi. Suma wkresów daje ostateczny wykres M.
22.
Metoda siŇā. WpŇāyw siŇā osiowych
1)Uwzglńôdniamy
wpŇāyw
siŇā osiowych zgodnie z wz.Maxwella-Mohra‚ąô‚ąô‚Ąē
=
‚ąę+ ‚ąę
np.:
wymnaŇľajńÖc
odpowiednie pola wykres√≥w przez odpowiednie rzńôdne,
ä
21
to
suma przemnoŇľonych p√≥l z wykresu M1 przez
odpowiadajńÖce
im rzńôdne z p√≥l wykresu M2*1/EJ+ suma
przemnoŇľonych
p√≥l z wykresu N1przez odpowiadajńÖce im rzńôdne z
pól
wykresu N2*1/EA.
EJ-sztywnoŇõńá
na zginanie wyraŇľona iloczynem mod. Younga przez
mom.bezwŇāadnoŇõci,
EA
- sztywnoŇõńá na Ňõciskanie-iloczyn
mod
Younga i pola przekroju
elementu
M,
-moment od obcińÖŇľeŇĄ jednostkowychN, ‚Ąē
-
siŇāy
osiowe normalne2)korzystamy
ze
wzoru kanonicznego met.siŇā
25.
Symetria i antysymetria.
Ô£ĪÔ£ľÔ£ī√§11x1
+
ä12
x2
+
‚ąÜ1P
=
0
Ô£ī
Ô£≤Ô£Ĺ podstawiajńÖc
wartoŇõci i tworzńÖc ukŇāad
Ô£ī√§
21x1
+
ä 22
x2
+
‚ąÜ 2
P
=
0Ô£īÔ£≥Ô£ĺ
r√≥wnaŇĄ.
‚ąÜ iP
=
‚ąĎ‚ąę
NiNj
dx
EA
3)RozwińÖzanie
ukŇāadu
daje wsp√≥Ňāczynniki Xi przez kt√≥re
wymnaŇľamy
wykresy Mi.
Suma
wkresów daje ostateczny wykres M=Mi*Xi+MP.
Aby
ujednolicińá
jednostki przyjńÖńá EJ=EA*l2
23.
Metoda siŇā. PodatnoŇõńá podp√≥r
UkŇāady
takie moŇľna rozwińÖzywańá od razu jako caŇāe lub dokonańá ich
podziaŇāu
na dwie odrńôbne czńôŇõci tj. symetryczna i antysymetrycznńÖ.
SiŇāy
w prńôtach dzielimy na symetryczne M,N i anty symetryczne T.
W
podporach symetryczna jest siŇāa R natomiast siŇāy antysymetryczne
to
M,H Aby utworzyńá po przecińôciu konstrukcji ukŇāad symetryczny
bńÖdŇļ
teŇľ antysymetryczny naleŇľy w miejscu wystńôpowania
konkretnych
siŇā ustawińá odpowiadajńÖce im podpory.
26.
Og√≥lne zaŇāoŇľenia metody przemieszczeŇĄ.
Podpory
sprńôŇľyste zwane teŇľ podporami podatnymi, mogńÖ ulegańá
skróceniu
lub wydŇāuŇľeniu pod wpŇāywem dziaŇāajńÖcych siŇā.
Przemieszczenia
wystńôpujńÖce w tych podporach sńÖ wprost
proporcjonalne
do reakcji w nich wystńôpujńÖcych. Podpora moŇľe mieńá
podatnoŇõńá
liniowńÖ lub obrotowńÖ (kńÖtowńÖ). Podpora o podatnoŇõci
liniowej
to na przykŇāad sprńôŇľyna pionowo podpierajńÖca belkńô.
Podpora
o podatnoŇõci obrotowej to taka, w kt√≥rej pod wpŇāywem siŇāy
nastńÖpi
obr√≥t przekroju. PodatnoŇõńá podpory f
to
wartoŇõńá
przemieszczenia
wynikajńÖca z dziaŇāania jednostkowej siŇāy. PodatnoŇõńá
liniowńÖ
wyraŇľamy w [m/N], natomiast podatnoŇõńá obrotowńÖ w
[rad/Nm].
JeŇõli na naszńÖ podporńô zadziaŇāa siŇāa N
(wzdŇāuŇľ
jej osi,
normalna),
to zgodnie z prawem Hooke`a, prńôt o dŇāugoŇõci pierwotnej
l
ulegnie
skr√≥ceniu o ‚ąÜl.*)
‚ąÜ)
=
+,
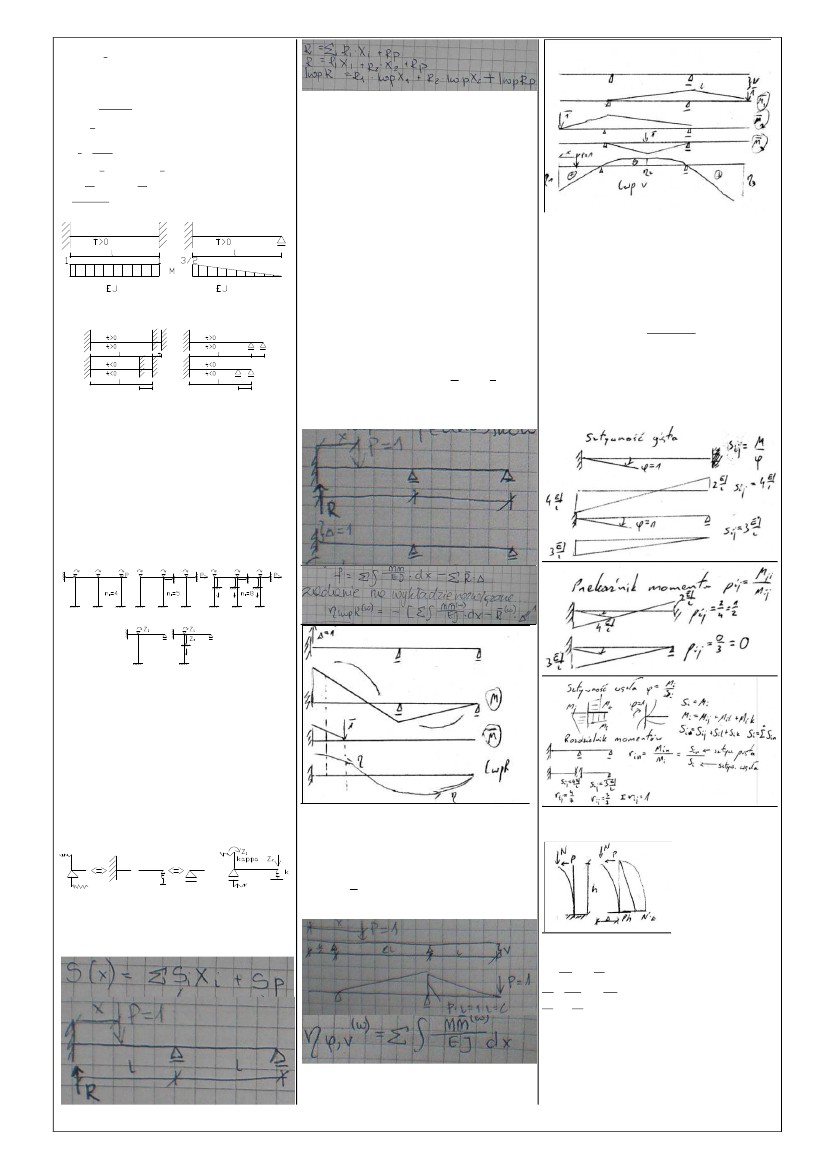
Niewiadomymi
sńÖ: przemieszczenia wńôzŇā√≥w. R√≥wnania kanoniczne
wyraŇľajńÖ
reakcje w miejscu doŇāoŇľonych wińôz√≥w (przesuwy i obroty).
O
liczbie niewiadomych decyduje stopieŇĄ kinematycznej
niewyznaczalnoŇõci
(SKN).
Jest to liczba wińôz√≥w, kt√≥re trzeba
wprowadzińá
aby ukŇāad usztywnińá. Momenty zginajńÖce i siŇāy tnńÖce
wywoŇāane
sńÖ obrotami koŇĄc√≥w prńôta oraz przesunińôciami
prostopadŇāymi
do osi prńôta.
27.StopieŇĄ
kinematycznej niewyznaczalnoŇõci.
Liczba
niewiadomych metody przemieszczeŇĄ; odpowiada liczbie
fikcyjnych
wńôzŇā√≥w kt√≥re trzeba wprowadzińá, aby zastńÖpińá ukŇāad
rzeczywisty
ukŇāadem kinematycznym wyznaczalnym o znanych
przemieszczeniach
wńôzŇā√≥w np=ő£ŌÜ+ő£‚ąÜ,
ő£ŌÜ
‚ÄďŇāńÖczna
liczna obrotów
wńôzŇā√≥w
sztywnych, ŇāńÖczńÖca co najmniej 2 statycznie niewyznaczalne
prńôty,
ő£‚ąÜ=2w-p-u+d
‚Äďliczba
niezaleŇľnych przesunińôńá (w-wńôzŇāy, p-
prńôty,
u-prńôty, w kt√≥rych koniec ma swobodńô przesuwu prostopadle
do
osi prńôta, d-przesztywnienia)
30.Metoda
termiczne.
przemieszczeŇĄ.
ObcińÖŇľenia
ObcińÖŇľenie
termiczne wywoŇāuje zmianńô dŇāugoŇõci, ugińôcia prńôta.
W
ukŇāadach statycznie wyznaczalnych zmiana temp. wywoŇāuje
deformacje
i przemieszczenia, ale nie powstajńÖ siŇāy wewn. W
ustrojach
statycznie niewyznaczalnych wywoŇāane przemieszczenia i
deformacje
prowadzńÖ do wystńÖpienia moment√≥w zginajńÖcych, siŇāy
poprz.
I podŇā. SiŇāy te mogńÖ byńá tak duŇľe, Ňľe
nie
powinny byńá omijane
w
obliczeniach. W metodzie przemieszczeŇĄ ogranicza sińô to do
wprowadzenia
do r√≥wnaŇĄ kanonicznych skŇāadnika temp. rit.
W obl.
Przyjmuje
sińô, Ňľe
wraz
z wysokoŇõcińÖ przekroju temp. zmienia sińô
liniowo:5
=
6
‚ąÜ
Rodzaje
odksztaŇāceŇĄ:
a)liniowe
wydŇāuŇľenie lub skr√≥cenie prńôta‚ąÜ(:
+
‚ąÜ(;
Ogólny
wz√≥r okreŇõlajńÖcy, spos√≥b budowy linii wpŇāywowej dowolnej
=7
>?@ A@ńôBC>ŇõA@)78
=
9 ‚ąô ) ‚ąô
2
siŇāy
S: lwpS=S1
lwpX1+S2
lwpX2+...+SnlwpXn+lwpSp
lub
skrócony:
)
lwpS=ő£SilwpXi+lwpSp
gdzie:
Si
‚ÄďwartoŇõńá
rozpatrywanej siŇāy S w
78
=
9 ‚ąô E‚ąÜ(;
F
+ ‚ąÜ(:
FG=7
>H)FIŇā>ŇõA@
F >H J>H?KL7M)
‚Ąé
ukŇāadzie
podstawowym pod wpŇāywem Xi=1,
lwpXi
‚Äďlinia
wpŇāywowa
b)obroty:
nadliczbowej
niewiadomej zastńôpujńÖcej nadliczbowy wińôz i, lwpSp
‚Äď
NO
PNQ‚ąÜ5=
=
linia
wpŇāywowa siŇāy S w ukŇāadzie podstawowym, n ‚ÄďstopieŇĄ
66))
statycznej
niewyznaczalnoŇõci.
7:
=
‚ąÜ ‚ąô K:7;
=
‚ąÜ ‚ąô K;‚ąÜK
= ‚ąÜK:
‚ąí
‚ąÜK;
Etapy:
-obc. rozpatrywanej belki poruszajńÖcńÖ sińô siŇāńÖ P=1, skierowana
22‚ąÜPR‚ąÜPRzgodnie
z kierunkiem obcińÖŇľeŇĄ przewidzianych dla danej konstrukcji
5@
= 9 S6
5C
= ‚ąí9 S6
=9
‚ąí 7?J. U>B?BFUB. )@V@>7FW)‚ÄďpoŇāoŇľenie
siŇāy P=1 okreŇõlamy odcińôtńÖ x i ukŇāadamy r√≥wnanie
Rit
WywoŇāuje:
zmianńô dŇāugoŇõci, ugińôcia -r√≥Ňľnica temperatur:
(2
schematy)
‚Äďogrzanie (ozińôbienie) r√≥wnomierne prńôta (4 wyraŇľajńÖce
poszukiwanńÖ wartoŇõńá w funkcji x -linie wpŇāywowe siŇā
wewnńôtrznych
moŇľemy wyrazińá w zaleŇľnoŇõci od linii wpŇāywowych
schematy)36.
Metoda Crossa. Og√≥lne zaŇāoŇľenia,moment√≥w
podporowych ‚Äďlinie wpŇāywowńÖ dowolnej wielkoŇõci
statycznej:
lwpS=ő£SilwpXi+lwpSp
gdzie:
Si
‚ÄďwartoŇõńá
rozpatrywanejwsp√≥Ňāczynniki
wejŇõciowe, procedura
siŇāy
S w ukŇāadzie podstawowym pod wpŇāywem Xi=1,
lwpXi
‚Äďliniaobliczeniowa.
wpŇāywowa
nadliczbowej niewiadomej zastńôpujńÖcej nadliczbowy wińôz
RozwińÖzujemy
ukŇāady majńÖce nadliczbowe wińôzy ‚Äď statycznie
i,
lwpSp
‚Äďlinia
wpŇāywowa siŇāy S w ukŇāadzie podstawowym, n ‚Äď
niewyznaczalne.
Niewiadomymi sńÖ momenty zginajńÖce wstopieŇĄ
statycznej niewyznaczalnoŇõci.
przekrojach
przywńôzŇāowych, a schemat statyczny tzw. podstawowy
??
t/h??
t/h(zastńôpczy)
przyjmuje sińô taki sam jak w metodzie przemieszczeŇĄ. Po
wyznaczeniu
moment√≥w wyjŇõciowych przeprowadza sińô rachunkowe34.
Linie wpŇāywowe siŇā ‚Äď konstrukcje
wyrównanie
moment√≥w w wńôzŇāach drogńÖ kolejnych przybliŇľeŇĄ
niewyznaczalne.
Metoda kinematyczna,<-
EJőĪt‚ąÜt/h(iteracjńô).
Przyjmujemy umowńô odniesienie do znak√≥w identycznńÖ,
procedurajak
dla metody przemieszczeŇĄ. Wsp√≥Ňāczynniki
obliczeniowa.1)
sztywnoŇõńá
gińôtna prńôta ‚Äďdla kokardy Sij=4EJ/l
‚Äďdla tr√≥jkńÖta
Zwalniamy
jeden, odpowiedni zew. lub wew. wińôz i dokonujemy Sij=3EJ/l
?jednostkowego
przemieszczenia na kierunku siŇāy, kt√≥rej lwp 2)
sztywnoŇõńá
wńôzŇāa Si=ő£Sij,
Si=Sij+Sik+Sil,
Sin=Min/ŌÜ,
Sin=Min
rysujemy3)
rozdzielniki
moment√≥w r√≥wnowaŇľnych czyli stosunek sztywnoŇõci
Rzńôdne
lwp wielkosci statycznej: ő∑lwpS=
-[MM/EJ dx ‚Äď R‚ąÜ]
prńôta
do sztywnoŇõci wńôzŇāa rij=Sij/Si,
rik=Sik/Si,
ril=Sil/Si,
rij+rik+ril=1,
WykonujńÖc
linie wpŇāywowńÖ:nő£1rin=1
-
reakcji, w postaci siŇāy skupionej lub siŇāy poprzecznej dokonujemy
4)
przekaŇļniki
moment√≥w ‚Äďstosunek momentu przekazanego do
przesunińôcia
o jednoŇõńá wzdŇāuŇľ kierunku dziaŇāania odpowiedniej siŇāy
-
momentu wymuszamy obr√≥t o kńÖt jednostkowy zgodnie z momentu
przekazywanego z przekroju doznajńÖcego obrotu
<-
‚ąÜt=t
őĪt
l
Pij=M(drugi
wńôzeŇā)/M(gdzie ŌÜ)zaŇāoŇľonym
kierunkiem dziaŇāania tego momentu
Z
PRAWEJ STRONY(lewego przykŇāadu) ZAMOCOWANIE
SZTYWNE
BEZ REAKCJI W OSI PRńėTA (klocek nad i pod
prńôtem)
31.
Metoda przemieszczen. Obciazenia osiowe.
ObcińÖŇľenia
osiowe sńÖ to siŇāy skierowane r√≥wnolegle do prńôta.
PowodujńÖ
przemieszczenie prńôta zgodnie z kierunkiem danej siŇāy, a
razem
z nim innych niezablokowanych prńôt√≥w w konstrukcji. WpŇāyw
siŇā
podŇāuŇľnych osiowych (1,2 wykres), +cińôŇľar wŇāasny (3 w), bez
wpŇāywu
siŇā osiowych (4 w), z wpŇāywem (5 w)
32.
Metoda przemieszczen. Podatnosc podpór.
W
konstrukcjach budowlanych wystńôpujńÖ przypadki sprńôŇľystego
osiadania
podp√≥r. WielkoŇõńá osiadaŇĄ zaleŇľna jest od dziaŇāajńÖcej siŇāy.
Zazwyczaj
przyjmuje sińô liniowńÖ zaleŇľnoŇõńá wielkoŇõci osiadania i siŇāy
(reakcji).
Im wińôksza siŇāa tym wińôksze osiadania. Rodzaje
podatnoŇõci:
a)PodatnoŇõńá
podparcia K- siŇāa powodujńÖca jednostkowe
obniŇľenie
podpory
b)PodatnoŇõńá
podpory w- obniŇľenie podpory siŇāńÖ
jednostkowńÖ
ZaleŇľnoŇõńá
: w=(1:K)
ns=r-3-p
(metoda statyczna), rii=ő£Mi+őļ
(moment) gdy Zi
to
obrót,
rii=ő£Mi+k
(siŇāa) gdy Zi
to
przesów
35.
Linie wpŇāywowe przemieszczen ‚Äď konstrukcje 37.
Teoria II rzńôdu.
niewyznaczalne.
Metoda kinematyczna,W
teorii II rzńôdu uwzglńôdniamy wpŇāyw narastajńÖcego ramienia siŇāy
wyboczeniowej na moment
wyboczeniowy.procedura
obliczeniowa.
ObcińÖŇľamy
rozpatrywanńÖ, statycznie niewyznaczalnńÖ belkńô
nieporuszajńÖcńÖ
sie siŇāńÖ jednostkowńÖ (P=1 lub M=1)
dziaŇāajńÖcńÖ
wzdŇāuŇľ
rozpatrywanego
przemieszczenia i obliczamy rzńôdne linii ugińôcia
spowodowanego
tym obcińÖŇľeniem, korzystajńÖc ze wzoru:
ő∑lwpV(ŌÜ)=ő£‚ąęMM/EJ
dx.
Otrzymana
linia ugińôcia bńôdzie poszukiwanńÖ linińÖ wpŇāywowńÖ
przemieszczenia
jako linii ugińôcia belki obcińÖŇľonej siŇāńÖ
nieporuszajńÖcńÖsińôbezpotrzebyobliczaniarzńôdnych.
33.
Linie wpŇāywowe siŇā ‚Äď konstrukcje
niewyznaczalne.
Metoda statyczna, procedura
obliczeniowa.
38.
R√≥wnanie r√≥zniczkowe preta sciskanego siŇā
osiowa
oraz jego rozwińÖzanie.
X=
:\
]
X
M=5)
= bc
+
bS
5
+ bd
A>?_5
+ be
?@V_5
-
rozwińÖzanie
:^
\
+
=
Z
‚ąí
Z
:]
`_S
:^`
‚ąí
‚ąô
=
0 -
r√≥wnanie r√≥Ňľniczkowe
‚ąô
Y
Z
Y
Z
=
‚ąí[
39.
SiŇāa krytyczna.
ObcińÖŇľenie
dopuszczalne oblicza sińô ze wzoru:
rZ
Y
+ Z{Y| + Yq = s
RozwińÖzanie:
Y
= }~{
v
w=rx
+
‚ÄĘ)
rx
=
‚ā¨rZ
‚ąí
{Z
gdzie:
Pkr
‚Äď
obcińÖŇľenie krytyczne
xw
‚Äď
wsp√≥Ňāczynnik bezpieczeŇĄstwa
40.
Wzory transformacyjne do obliczenia
momentów
wezŇāowych w pretach sciskanych
osiowo.
1.Belka
obustronnie utwierdzona:
f
f
=
=
=
=
g
g
g
g
h
=i)j + k=i)jf
‚ąí
l=i)mn
hk=i)j
+ =i)jf
‚ąí
l=i)mn
h
′=i)j
‚ąí
"=i)mn
h
"=i)j n
2.Belka
jednostronnie utwierdzona:
h
′=i)j
‚ąí
p′=i)mnf
=
g3.‚ÄėWspornik‚Äô:
f
f
RYS.
41.
R√≥wnanie ukŇāadu drgajńÖcego o 1 stopniu
swobody
oraz jego rozwińÖzanie.
Yq
+ rZ
Y
= s
r=t
u
RozwińÖzanie:
Y
= v w=r + j)
42.
Wzór Geigera
300
1
h=[]
y
mm
Y=
x
gy
y
43.
R√≥wnanie ukŇāadu drgajńÖcego o 1 stopniu
swobody
poddanego dziaŇāaniu obcińÖŇľeŇĄ
wymuszajńÖcych.
rZ
Y
+ Yq =
z=
)
u
44.
R√≥wnanie tŇāumionego ukŇāadu drgajńÖcego o 1
stopniu
swobody oraz jego rozwińÖzanie.
Wyszukiwarka
Podobne podstrony:
MB (Lab) - R√≥Ňľne ŇõcińÖgi, 12, GńôstoŇõńá(p)-masaJednostkiObjńôtoŇõciMateriaŇāuBezUwzglńôdnieniaPor√≥wWewMater
Egzamin - sciagi, 12. Prawo Coulomba, 12
12, Studia, STUDIA PRACE ŇöCIńĄGI SKRYPTY
Maniek 2009-03-12 SC, ŇöcińÖgi do szkoŇāy, Zajńôcia SpecializujńÖce
download Zarzadzanie Logistyka wykŇāad na dzieŇĄ 18.12.2004-[ www.potrzebujegotowki.pl ], ŇöcińÖgi i wyp
sciagi socjologiczne, 12, 12
sciagi socjologiczne, 12, 12
sprawozdanie temat 12-[ www.potrzebujegotowki.pl ], ŇöcińÖgi i wypracowania
pkmiu zadania 1 2 3 4 6 7 8 10 11 12, ŇõcińÖgi III OP
Genetyka 3.12.2012, Biologia, ŇõcińÖgi
WOS 2008-12-09sc, ŇöcińÖgi do szkoŇāy, Wiedza o SpoŇāeczeŇĄstwie
ŇõcińÖgi wyŇľsza, ŇöCIńĄGA 12, REDUKCJE OBSERWACJI ASTRONOMICZNYCH I GEODEZYJNYCH NA GEOIDńė I ELIPSOIDńė
biblia 13.12.07, SzkoŇāa- pomoce naukowe ;P, ŇöcińÖgi;), Polski
hist10-12.17.04.08, SzkoŇāa- pomoce naukowe ;P, ŇöcińÖgi;)
12 TIORB W12 zageszczanie gruntow i wyko waskop(1), Budownictwo Politechnika Rzeszowska, Rok II, Tec
wykŇāad 12 pamińôńá