Wyjaśnić różnicę między strukturą sterowania i regulacji.
Określić typ członu,wyznaczyć transmitancję i właściwości tego członu o równaniu:
![]()
3.Układ dynamiczny opisany jest równaniem stanu:
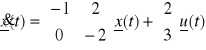
,napisać równania dla każdej zmiennej stanu.
Ad 1.
Sterowanie - celowe oddziaływanie na obiekt tak, aby osiągnąć jego pożądane zachowanie.
Regulacja - sterowanie w układzie zamkniętym zawierającym węzeł sumacyjny,za pomocą, którego realizowane jest ujemne sprzężenie zwrotne.
Struktury
sterowania regulacji
Obiekt sterowalny obiekt sterowalny ┌→obiekt regulowany→→┬→
↓ ↑ ↓ ↑ ↑ ↓
komputer ↑ komputer ┌→ x ↓
↓ ↑ ↕ ↑ ↓ -
operator operator └←←← regulator← e←←┴←w
↑ +
sygnał nastawiający sygnał wejściowy
Ad 2.
![]()
Jest to człon inercyjny. Postać ogólna równania: ![]()
Zamiana na transmitancję operatorową .
Ze wzorów : ![]()
u =u(s) , y =y(s) , T ,k - stałe. Stąd : y(s)Ts + y(s) = ku(s)
Transmitancja operatorowa ![]()
Wartości własne: Ts+1=0 s=![]()
Carakterystyki : statyczna y=ku
skokowa y(t)=h(t)=k(1-![]()
dla u(t)=1(t)ust
Charakterystyka amplitudowo-fazowa :
G(j ω)=![]()
część rzeczywista P(ω)= ![]()
część urojona Q(ω)= ![]()
Charakterystyka amplitudowa (logarytmiczna)
Lm(ω)=20 log
dla ω ≤ ![]()
Lm(ω)=20 log k dla ω ≥ ![]()
Lm(ω)=20 log k- 20 log (ωT)
Równania układu i macierze:
![]()
równanie wyjścia y(t)=x(t) równanie stanu ![]()
dla T= 1 i k=1 mamy macierze:
A= ![]()
B=![]()
C=![]()
D=![]()
Ad 3.
Ponieważ jest to macierz dwuwymiarowa otrzymujemy dwa następujące równania stanu:
![]()
![]()
u
y
y=ku
y(t), u(t), h(t)
k*ust
u(t)= 1(t)*ust
t
y(t)=h(t)=h*(1-e-t/T)*u
Wyszukiwarka
Podobne podstrony:
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
Z9, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
ZESTAW 1, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
156, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolos
Sciaga234, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolo
konop, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolos
ZESTAW 6, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
WNIOSKI UZUPEŁNIENIE, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty,
Z6, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
przekazniki automaty 5 wojto, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Podstawy Automat
234, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolos
Z10, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
miszczu zejsc Elementy logiczne, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab,
ĆW3#DK, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty laborka, automatyka lab, Auto
Elemety log-konspekt, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty,
Z4, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
więcej podobnych podstron