Charakterystyki częstotliwościowe otrzymuje się na podstawie transmitancji widmowej, jeśli ca potraktuje się jako zmienną niezależną, przybierającą wartości od O do + oo. Charakterystyki częstotliwościowe mają nie tylko sens pojęciowy, lecz i pomiarowy* ponieważ wprowadzając eksperymentalnie do układu wymuszenie harmoniczne o nastawianej pulsacji ω = 2πf można mierzyć charakterystyki częstotliwościowe na wyjściu układu. Można rozróżnić następujące charakterystyki częstotliwościoe:
- charakterystykę amplitudową A(ω) =|G(jω)|,
- charakterystykę fazową ![]()
ϕ(ω)= arg G(jω),
- charakterystykę raeczywistą R(ω) = Re [G(jω)],
- charakterystykę urojoną Q(ω) = Im [G(jω)]. Dwie ostatnie przedstawiane są w postaci graficznej jako charakterystykę amplitudowo-fazową (wykres Nyquista). To jest krzywą G(j o), którą można otrzymać na płaszczyźnie zmiennej zespolonej o osiach R(co) i Q(o»), po przez uzmiennienie ω.

InterpretacJe charakterystyk:

3. Układem nieliniowym - jest każdy układ zawierający chociaż l element nieliniowy. Na przykład, nieliniowe są wszystkie układy zawierające elementy o działaniu przekaźnikowym lub elementy, w których uwzględnimy takie zjawiska jak tarcie suche, luzy, histereza albo mechaniczne ograniczenia ruchu. Elementy i układy nieliniowe opisujemy za pomocą nieliniowych równań różniczkowych .różnicowych lub algebraicznych. Nie obowiązuje ich zasada superpozycji.
Układ statyczny nieliniowy R1+R2(i)*i=u
Układ dynamiczny nieliniowy L*di(t)/dt + R(t)*i(t)=u(t)
gdzie : R2 - oporność zależna nieliniowo od prądu
R(t)=r*e-t -współczynnik zależny nieliniowo od czasu.
Podstawową zależnością charakteryzującą nieliniowy układ dynamiczny jest jego charakterystyka statyczna, czyli zależność między jego sygnałem wyjściowym, a sygnałem wejściowym w stanach ustalonych, tj. przy założeniu, że wszystkie pochodne względem czasu sygnałów i współrzędnych układu są równe zeru. Charakterystyka statyczna stanowi zbiór punktów równowagi układu.
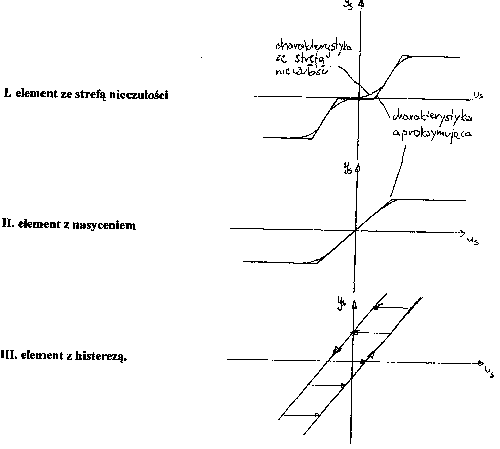
Przykłady:
Wyszukiwarka
Podobne podstrony:
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
Z9, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
ZESTAW 1, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
156, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolos
Sciaga234, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolo
konop, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolos
ZESTAW 6, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
WNIOSKI UZUPEŁNIENIE, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty,
przekazniki automaty 5 wojto, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Podstawy Automat
234, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Kolos, Kolos
Z10, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
miszczu zejsc Elementy logiczne, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab,
ĆW3#DK, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty laborka, automatyka lab, Auto
Z1, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
Elemety log-konspekt, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty,
Z4, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
więcej podobnych podstron