Pakiety informatyczne w mechanice i budowie maszyn
Laboratorium
Temat: Wyznaczenie przemieszczeń węzłowych i częstości drgań własnych konstrukcji
Data odbycia laboratorium: 16.04.2012
Wykonał: Mirosław Gatlik WIMiR
Kod programu:
p=3000;
E=2e11;
L=2;
ro=7850;
A=0.000775;
x = [0,0.5*L, L, 1.5*L, 2*L];
y = [0, (sqrt(3)/2)*L, 0, (sqrt(3)/2)*L, 0];
k = [1 0 -1 0; 0 0 0 0; -1 0 1 0; 0 0 0 0]
m = [2 0 1 0; 0 2 0 1; 1 0 2 0; 0 1 0 2]
k12 = ((E*A)/L)*k;
k23 = ((E*A)/L)*k;
k13 = ((E*A)/L)*k;
k24 = ((E*A)/L)*k;
k34 = ((E*A)/L)*k;
k35 = ((E*A)/L)*k;
k45 = ((E*A)/L)*k;
m12 = ((ro*A*L)/6)*m;
m23 = ((ro*A*L)/6)*m;
m13 = ((ro*A*L)/6)*m;
m24 = ((ro*A*L)/6)*m;
m34 = ((ro*A*L)/6)*m;
m35 = ((ro*A*L)/6)*m;
m45 = ((ro*A*L)/6)*m;
c12 = policz_cosinusa(x(1),x(2),y(1),y(2));
s12 = policz_sinusa(x(1),x(2),y(1),y(2));
c23 = policz_cosinusa(x(2),x(3),y(2),y(3));
s23 = policz_sinusa(x(2),x(3),y(2),y(3));
c13 = policz_cosinusa(x(1),x(3),y(1),y(3));
s13 = policz_sinusa(x(1),x(3),y(1),y(3));
c24 = policz_cosinusa(x(2),x(4),y(2),y(4));
s24 = policz_sinusa(x(2),x(4),y(2),y(4));
c34 = policz_cosinusa(x(3),x(4),y(3),y(4));
s34 = policz_sinusa(x(3),x(4),y(3),y(4));
c35 = policz_cosinusa(x(3),x(5),y(3),y(5));
s35 = policz_sinusa(x(3),x(5),y(3),y(5));
c45 = policz_cosinusa(x(4),x(5),y(4),y(5));
s45 = policz_sinusa(x(4),x(5),y(4),y(5));
DC12 = [c12 s12 0 0; -s12 c12 0 0; 0 0 c12 s12; 0 0 -s12 c12];
DC23 = [c23 s23 0 0; -s23 c23 0 0; 0 0 c23 s23; 0 0 -s23 c23];
DC13 = [c13 s13 0 0; -s13 c13 0 0; 0 0 c13 s13; 0 0 -s13 c13];
DC24 = [c24 s24 0 0; -s24 c24 0 0; 0 0 c24 s24; 0 0 -s24 c24];
DC34 = [c34 s34 0 0; -s34 c34 0 0; 0 0 c34 s34; 0 0 -s34 c34];
DC35 = [c35 s35 0 0; -s35 c35 0 0; 0 0 c35 s35; 0 0 -s35 c35];
DC45 = [c45 s45 0 0; -s45 c45 0 0; 0 0 c45 s45; 0 0 -s45 c45];
ko12 = DC12'*k12*DC12;
ko23 = DC23'*k23*DC23;
ko13 = DC13'*k13*DC13;
ko24 = DC24'*k24*DC24;
ko34 = DC34'*k34*DC34;
ko35 = DC35'*k35*DC35;
ko45 = DC45'*k45*DC45;
Kg = zeros(10);
pk12=[1 2 3 4];
Kg(pk12,pk12)=Kg(pk12,pk12)+ko12;
pk23=[3 4 5 6];
Kg(pk23,pk23)=Kg(pk23,pk23)+ko23;
pk13=[1 2 5 6];
Kg(pk13,pk13)=Kg(pk13,pk13)+ko13;
pk24=[3 4 7 8];
Kg(pk24,pk24)=Kg(pk24,pk24)+ko24;
pk34=[5 6 7 8];
Kg(pk34,pk34)=Kg(pk34,pk34)+ko34;
pk35=[5 6 9 10];
Kg(pk35,pk35)=Kg(pk35,pk35)+ko35;
pk45=[7 8 9 10];
Kg(pk45,pk45)=Kg(pk45,pk45)+ko45;
Mg = zeros(10);
mk12=[1 2 3 4];
Mg(mk12,mk12)=Mg(mk12,mk12)+m12;
mk23=[3 4 5 6];
Mg(mk23,mk23)=Mg(mk23,mk23)+m23;
mk13=[1 2 5 6];
Mg(mk13,mk13)=Mg(mk13,mk13)+m13;
mk24=[3 4 7 8];
Mg(mk24,mk24)=Mg(mk24,mk24)+m24;
mk34=[5 6 7 8];
Mg(mk34,mk34)=Mg(mk34,mk34)+m34;
mk35=[5 6 9 10];
Mg(mk35,mk35)=Mg(mk35,mk35)+m35;
mk45=[7 8 9 10];
Mg(mk45,mk45)=Mg(mk45,mk45)+m45;
Kg(:,[1 2 10])=0;
Kg([1 2 10],:)=0;
Kg(1,1)=1;
Kg(2,2)=1;
Kg(10,10)=1;
Kg
Mg(:,[1 2 10])=0;
Mg([1 2 10],:)=0;
Mg(1,1)=1;
Mg(2,2)=1;
Mg(10,10)=1;
Mg
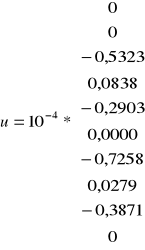
u=inv(Kg)*[0;0;0;0;0;0;-p;0;0;0]
omega2=eig(Kg,Mg);
fmes=sqrt(omega2(2))/(2*pi)
Wyniki otrzymane z programu MATLAB
Globalna macierz sztywności:
Globalna macierz bezwładności:
Przemieszczenia węzłowe i częstość drgań własnych konstrukcji:
fmes =
0.1592

Wyszukiwarka
Podobne podstrony:
wspolczynnik zlamania sprawozdanie, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Lab
Tabelka sprawozdanie, Energetyka AGH, semestr 3, III Semestr, FIZYKA.J, FIZYKA LABORATORIA
poziomy energetyczne sprawozdanie, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Labo
hall sprawozdanie, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, labork
Ćwiczenie M 5 - Oscyloskop - Sprawozdanie, Energetyka AGH, semestr 4, IV Semestr, Metrologia, LABO
EAP Sprawozdanie Lab9, AGH, Semestr IV, Podstawy automatyki[Ornacki,Pakuła,Łukomski,Snamina], EAP Sp
EAP Sprawozdanie Lab7, AGH, Semestr IV, Podstawy automatyki[Ornacki,Pakuła,Łukomski,Snamina], EAP Sp
EAP Sprawozdanie Lab10, AGH, Semestr IV, Podstawy automatyki[Ornacki,Pakuła,Łukomski,Snamina], EAP S
prąd stały - sprawozdanie, Elektrotechnika AGH, Semestr III zimowy 2013-2014, semestr III, semestr I
Sprawozdanie katalogi, AGH, Semestr 5, Napędy i sterowanie hydrauliczne i pneumatyczne, NiS, pneumat
indukcyjnosc sprawozdanie, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium
RLC sprawozdanie, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, laborki
regulator cyfrowy sprawozdanie, Elektrotechnika AGH, Semestr IV letni 2013-2014, Teoria Sterowania i
FiltryAdaptacyjne sprawozdanie, Elektrotechnika AGH, Semestr V zimowy 2014-2015 - MODUŁ C, Teoria i
sprawozdanie05, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, laborki,
Sprawozdanie10, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, laborki,
sprawozdanie08, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, laborki,
Cwiczenie 3 - sprawozdanie, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratoriu
więcej podobnych podstron