REGULACJA PRĘDKOŚCI OBROTOWEJ
Cel ćwiczenia
W ćwiczeniu bada się układ stabilizacji prędkości obrotowej silnika prądu stałego, pracującego w warunkach zmiennego obciążenia. Stabilizacja realizowana jest w dwóch odrębnych układach regulacji, ze sprzężeniem od zakłócenia oraz od wielkości regulowanej.
W ćwiczeniu dokonuje się porównania właściwości statycznych i dynamicznych obu układów regulacji przy zmianach wartości zadanej i zmianach obciążenia.
Układ regulacji prędkości obrotowej ze sprzężeniem zwrotnym od zakłócenia.
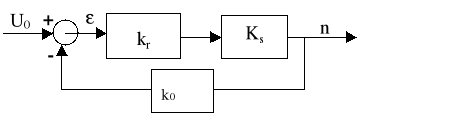
Na rys. 1 przedstawiono układ regulacji prędkości pracujący w układzie otwartym.
Wartość zadaną n0 po przetworzeniu na sygnał napięciowy u0=k0 n0 i po wzmocnieniu kw razy podaje się jako napięcie us na obiekt regulacji (silnik). Przyjmuje się iż silnik wykazuje inercję I-go rzędu i jego transmitancja wynosi ![]()
.
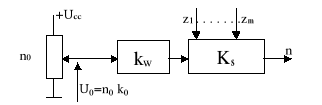
Rys. 1 Schemat układu sterowania w układzie otwartym;
Układ można opisać równaniem
![]()
(1)
W stanie ustalonym, przy braku zakłóceń powinno być : n=n0, czyli:n0=n0 k0 kw ks .
Stąd należy tak dobrać wzmocnienia aby zachodziło: k0 kw ks=1.
Sterowanie polega na podaniu wartości zadanej u0=k0 n0(t) na wzmacniacz kw, który wypracowuje sygnał sterujący obiektu u(t), tak aby na wyjściu obiektu otrzymać przebieg n(t) zgodny z przebiegiem zadanym. Wszelkie zakłócenia z(t) oddziałujące na obiekt powodują niezgodność pomiędzy n(t) a n0(t).
Gdy wzmocnienie statyczne obiektu ks zmieni się do wartości ![]()
ks to zgodnie z równaniem 1 otrzymamy:
![]()
(2)
![]()
- prędkość na wyjściu układu gdy wzmocnienie statyczne silnika wynosi ![]()
![]()
- prędkość na wyjściu układu gdy wzmocnienie statyczne obiektu wynosi ![]()
ks
Z równań 2 i 3 wynika że układ jest wrażliwy zarówno na zakłócenia jak i na zmiany parametrów obiektu.
Każdemu sygnałowi, bez względu na to czy jest on traktowany jako wejściowy czy zakłócający można przypisać transmitancję wynikającą z wpływu danej wielkości na sygnał wyjściowy obiektu. Tak więc przy jednym sygnale wejściowym i m sygnałach zakłócających z1..zm, właściwości obiektu opisane są macierzą transmitancji o wymiarach 1x(m+1). Sygnał wyjściowy obiektu jest sumą sygnałów z wyjść poszczególnych transmitancji i równanie (1) należy rozszerzyć do postaci:
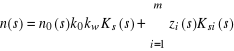
(3)
gdzie Ksi - - transmitancja obiektu dla i-tego zakłócenia zi(s)
Przy analizie działania układów regulacji wpływ zakłóceń przelicza się na wyjście obiektu- równoważny schemat przedstawia rys 2.
rys. 2 Schemat układu sterowania w układzie otwartym; wpływ zakłóceń przeliczono na wyjście obiektu.
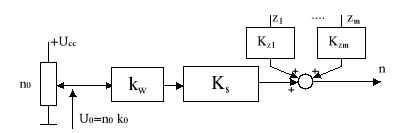
Jeśli zakłócenia występujące w układzie są mierzalne układ sterowania można zmodyfikować do postaci przedstawionej na rys. 3. Ten typ sterowania nazywa się sterowaniem z pomiarem zakłócenia w układzie otwartym lub sterowaniem przez działanie wprost (antycypacyjne z wyprzedzeniem; ang. feedforward). W układzie tym wpływ zakłócenia eliminuje się zmieniając sygnał sterowania w zależności do zmian sygnałów zakłócających.
rys. 3. Schemat układu sterowania z pomiarem zakłócenia w układzie otwartym;
Tego typu sterowanie wyprzedza wpływ zakłócenia na obiekt gdyż człon pomiarowy jest z reguły znacznie szybszy od obiektu i regulator zdąży prawidłowo zadziałać zanim wpływ zakłócenia objawi się na wyjściu układu.
Istotnym ograniczeniem układów z regulacją od zakłócenia jest możliwość ich stosowania tylko w przypadku zakłóceń mierzalnych, ponadto tak jak układy bez pomiaru zakłócenia są wrażliwe na zmiany parametrów obiektu (przy braku zakłóceń układy są równoważne).
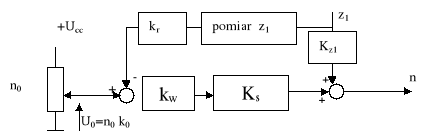
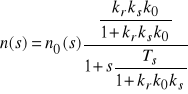
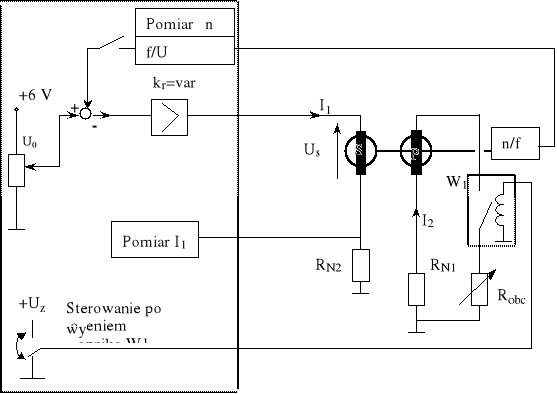
Przykład praktycznej realizacji układu ze sprzężeniem od zakłócenia przedstawiono na rys. 4. W układzie tym obiekt regulacji-silnik, sprzężony jest mechanicznie z prądnicą P. Obciążenie prądnicy stanowi dekada rezystancyjna Robc. Zmiana obciążenia powoduje zmianę momentu hamującego i w rezultacie zmianę prędkości obrotowej układu. Prąd płynący w obwodzie prądnicy traktuje się jako zakłócenie. Sygnałem proporcjonalnym do tak rozumianego zakłócenia jest spadek napięcia na rezystancji RN2 . Sygnał sterowania otrzymuje się jako sumę wartości zadanej Uz i wzmocnionego kr razy spadku napięcia na rezystancji RN2.
Sygnał sprzężenia doprowadzany jest ze znakiem „+” do węzła sumacyjnego ponieważ kierunek działania zakłócenia jest przeciwny do kierunku działania wymuszenia- zwiększenie prądu w obwodzie prądnicy powoduje zmniejszenie prędkości obrotowej silnika.
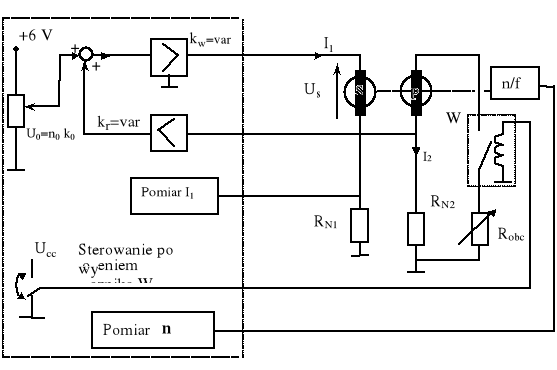
Rys 4. Realizacja układu regulacji ze sprzężeniem zwrotnym od zakłócenia.
-RN1=RN2=0.5 ![]()
- służą do pomiaru prądów odpowiednio I1 i I2 metodą pośrednią
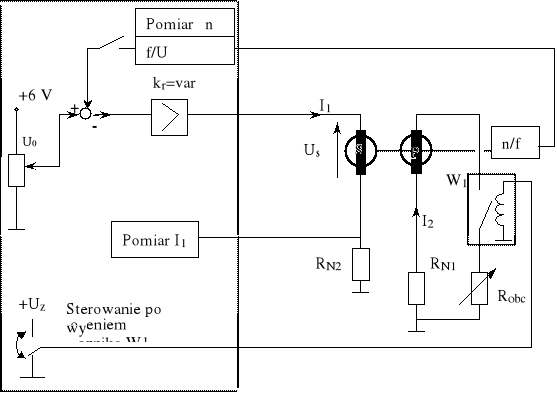
Wartość wzmocnienia kr dobiera się tak, aby pomimo zmiany obciążenia, czyli prądu w obwodzie prądnicy, obroty silnika w stanie statycznym nie uległy zmianie. Dobór kr wyjaśnia rys. 5. W celu utrzymania niezmiennych obrotów n przy zmianie prądu obciążenia I2 konieczne jest zwiększenie napięcia Us o wartość ![]()
:
![]()
(4)
stąd:
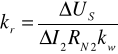
(5)
Rys. 5 Graficzna metoda wyznaczenia wzmocnienia kr (kz1 - moduł transmitancji zakłóceniowej ![]()
)
Układ regulacji prędkości obrotowej ze sprzężeniem zwrotnym od wielkości regulowanej.
3.1 Wprowadzenie
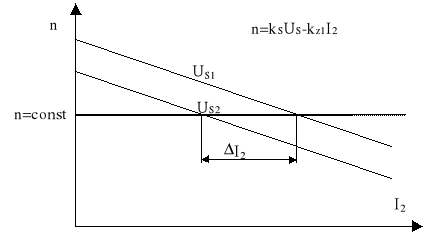
W przypadku gdy zakłócenie nie jest mierzalne (lub jeśli pomiar jest uciążliwy), można zrealizować układ wykorzystujący w procesie regulacji skutek (y) a nie przyczynę (z) -rys. 6. Nie występuje wówczas żadne działanie z wyprzedzeniem. Można to w pewnym sensie skompensować, stosując regulator zawierający działanie różniczkujące (sTd), przyspieszające działanie regulatora w stanach dynamicznych.
rys. 6. Układ regulacji ze sprzężeniem od wielkości regulowanej; gdzie y0-wartość zadana, y- wartość wyjściowa, - uchyb regulacji; R - regulator, przykładowo typu PID
Po zastosowaniu regulatora proporcjonalnego (P),. o wzmocnieniu kr, w stanie ustalonym mamy:
![]()
; (6)
![]()
(7)
stąd po przekształceniach:
![]()
(8)
![]()
(9)
gdzie:
- uchyb regulacji;
ks -wzmocnienie statyczne obiektu;
kr- wzmocnienie członu proporcjonalnego regulatora
W układzie z rys. 6 sygnały wyjściowy i wejściowy obiektu mają ten sam wymiar.
W przypadku gdy tej zgodności nie ma, stosuje się w pętli sprzężenia zwrotnego przetwornik pomiarowy n/U0 o stałej k0 (rys. 7). Wówczas:
![]()
(10)
![]()
(11)
stąd:
![]()
(12)
![]()
(13)
Dla ![]()
równanie 12 upraszcza się do postaci gwarantującej idealną regulację prędkości obrotowej:
![]()
(14)
Przy spełnieniu warunku ![]()
, ani zmiany wartości ks ani kr nie powodują zmian prędkości wyjściowej układu.
Rys. 7 Schemat układu regulacji prędkości obrotowej ze sprzężeniem od wielkości regulowanej.
Przyjmując jak poprzednio dla stanów dynamicznych ![]()
, prędkość na wyjściu układu w postaci operatorowej wyniesie:
(15)
Dla ![]()
, stała czasowa układu zamkniętego ![]()
wyniesie:
![]()
(16)
W szczególnym przypadku dla ![]()
(napięcie na wyjściu przetwornika n/U równe napięciu podanemu na silnik - Us ) otrzymamy:
![]()
(17)
3.2. Przykład praktycznej realizacji układu z rys. 7 przedstawiono na rys. 8.
rys. 8. Realizacja układu regulacji ze sprzężeniem od wartości wyjściowej
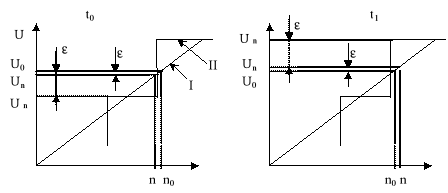
Do pomiaru prędkości wykorzystuje się sygnał z przetwornika obrotowo impulsowego n/f0. Częstotliwość mierzy się poprzez zliczanie impulsów a następnie przetwarza na napięcie. Z zasady tego przetworzenia wynika iż wyjściowy sygnał napięciowy jest skwantowany. Wprowadza to pewną niedogodność ujawniającą się w sytuacji gdy wartość wzmocnienia kr jest większa od wartości, dla której uchyb regulacji liczony z (12) jest mniejszy od kwantu napięcia ![]()
przetwornika n/U (rys 9). W stanie ustalonym w chwili t0 prędkość układu wynosi n. Napięcie na wyjściu dyskretnego przetwornika n/U wynosi U'n. i jest różne od napięcia Un które wystąpiło by na wyjściu przetwornika o charakterystyce ciągłej. W rezultacie, na wyjściu węzła sumacyjnego otrzymuje się sygnał '>> . Oznacza to, że wartość napięcia podanego na silnik jest wielokrotnie większa niż w analogicznym układzie z przetwornikiem ciągłym (ew. ograniczona wartością napięcia zasilania układu). To spowoduje zwiększanie prędkości układu aż do momentu gdy prędkość przekroczy wartość zadaną n0. Po przekroczeniu n0 sygnał uchybu zmienia znak na przeciwny i rozpoczyna się proces hamowania (przebiegi dla czasu t1).
Z przeprowadzonego rozumowania wynika że próby uzyskania uchybów mniejszych od ![]()
prowadzą do wytworzenia na silniku niekorzystnego przebiegu napięcia o skrajnie dużych wartościach i mogą powodować mechaniczne uszkodzenia silnika.
Równie niekorzystny wpływ na działanie układu regulacji ma mimośrodowe osadzenie przetwornika obrotowo - impulsowego [2].
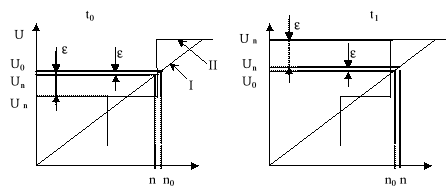
Rys. 9. Wpływ kwantowego charakteru przetwornika n/U w układzie ze sprzężeniem od wielkości regulowanej
Opis stanowiska pomiarowego
Układ pomiarowy realizowany jest przez system komputerowy. Elementy układu objęte linią przerywaną na rys. 4 i 8 realizowane są programowo. Silnik sprzężony jest mechanicznie z prądnicą i przetwornikiem obrotowo impulsowym. Zamknięcie / otwarcie obwodu prądnicy dokonuje się za pomocą przekaźnika.
W programie dostępne są opcje pomiarów statycznych i dynamicznych.
- W opcji pomiarów statycznych system komputerowy zapisuje do pamięci 20 kolejnych wyników pomiaru. Na ekranie przedstawiane są wartości średnie mierzonych sygnałów.
- W opcji pomiarów dynamicznych działanie programu polega na zadaniu skokowej zmiany wybranej wartości (z poziomu wartości zadanej poprzednio do aktualnie nastawionej). Przebiegi czasowe prędkości obrotowej, napięcia na silniku i prądu w obwodzie prądnicy przedstawiane są na wykresie. Wykonanie skoku uruchamia się przyciskiem „Skok”. Czas trwania rejestracji przed i po zadaniu skoku określa się w programie. Wprowadzone wartości nastaw stanowią wartości początkowe następnego skoku.
Do pomiaru prędkości obrotowej wykorzystuje się przetwornik obrotowo impulsowy (250 impulsów na obrót). Prędkość wyznacza się na podstawie pomiaru czasu trwania zadanej liczby impulsów. Żądaną liczbę impulsów określa się w programie
Zadania
5.1 Dokonać identyfikacji właściwości statycznych zespołu: określić pomiarowo zależności pomiędzy napięciem Us a prędkością obrotową dla różnych obciążeń I2 (konieczne do wykreślenia charakterystyk z rys. 5).
5.2. Wyznaczyć prawidłową wartość wzmocnienia kr, dla układu ze sprzężeniem zwrotnym od zakłócenia. Przeprowadzić pomiary sprawdzające. Badania przeprowadzić dla różnych wartości prądu I2, napięcia Uz i wartości wzmocnienia kw. Sprawdzić czy optymalna nastawa kr jest za każdym razem taka sama.
5.3. Dla układu ze sprzężeniem od zakłócenia wybrać opcję pomiarów dynamicznych. Wyznaczyć właściwości dynamiczne układu otwartego. Wykonać pomiary odpowiedzi układu zamkniętego na:
a) skokową zmianę wartości zadanej
b) zmianę prądu w obwodzie prądnicy
5.4. Wykonać pomiary z p. (5.3) dla układu ze sprzężeniem zwrotnym od wartości wyjściowej. Porównać przebiegi prędkości obrotowej i napięcia na silniku w obu układów regulacji. Pomiary wykonać dla wartości wzmocnienia kr.=1, 5, 100. Porównać przebiegi napięcia na silniku przy różnych wartościach wzmocnienia kr. Ocenić warunki pracy silnika dla wszystkich przypadków.
Pytania kontrolne:
1. Jaki jest podstawowy schemat blokowy zamkniętego układu regulacji ?
2. Jaki jest schemat blokowy badanego w ćwiczeniu układu ze sprzężeniem zwrotnym od zakłócenia ?
3. Porównać właściwości dynamiczne obu układów.
4. Czy badany układ ze sprzężeniem zwrotnym od zakłócenia działa poprawnie, gdy prędkość obrotowa maleje wskutek zwiększenia momentu hamującego lub z innej przyczyny niż zwiększenie prądu w obwodzie prądnicy (np. wskutek wzrostu tarcia w łożyskach silnika lub prądnicy) ?
Literatura
[1] J. Klamka, Z. Ogonowski: Teoria systemów liniowych Skrypty uczelniane Nr 1987 Gliwice 1996.
[2] Laboratorium miernictwa przemysłowego Pomiar prędkości obrotowej
(KWr), plik: Reg_PR_27-01.doc
Laboratorium Podstaw Automatyki Regulacja prędkości obrotowej
1
- 7 -
Laboratorium Podstaw Automatyki
Wyszukiwarka
Podobne podstrony:
REG PID 27-01.DOC, Laboratorium Podstaw Automatyki
ĆWICZENIA ANALOGOWE, PWR [w9], W9, 3-4, Semestr bez wpisu, Podstawy automatyki, Laboratorium, Podsta
CWICZENIE 2(1), PWR [w9], W9, 3-4, Semestr bez wpisu, Podstawy automatyki, Laboratorium, Podstawy au
AUTORZY, PWR [w9], W9, 3-4, Semestr bez wpisu, Podstawy automatyki, Laboratorium, Podstawy automatyk
przekazniki automaty 5 wojto, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Podstawy Automat
Regul wiel 2001 , Laboratorrium Podstaw Automatyki
Laboratorium Podstaw Automatyki
Laboratorium Podstaw automatyki
pidy6poprawione, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Podstawy Automatyki 2, przyda
automaty, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Podstawy Automatyki 2, przydatne
sprawko 1D, Automatyka 1d, Laboratorium z Podstaw Automatyki
5D Stosowanie PLC do sterow(1), PWR [w9], W9, 3-4, Semestr bez wpisu, Podstawy automatyki, Laborator
Elektronika- Komputerowa symulacja analogowych układów elektronicznych.DOC, LABORATORIUM PODSTAW AUT
paa1, Laboratorium Podstaw Automatyki
Ćwiczenia laboratoryjne z podstaw automatyki Krajewski, Musielak
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
więcej podobnych podstron