Def. 3.3.1 (wyznacznik macierzy)
Wyznacznikiem macierzy kwadratowej nazywamy funkcję, która każdej macierzy rzeczywistej (zespolonej) A = [aij] przypisuje liczbę rzeczywistą (zespoloną) detA. Funkcja ta jest określona wzorem indukcyjnym:
1. jeżeli macierz A ma stopień n = 1, to
![]()
,
2. jeżeli macierz A ma stopień n ≥ 2, to
![]()
gdzie Aij oznacza macierz otrzymaną z macierzy A przez skreślenie i-tego wiersza i j-tej kolumny.
Uwaga. Wyznacznik macierz A oznaczamy także przez det[aij] lub |A|, a w formie rozwiniętej przez
.
Fakt 3.3.3 (interpretacja geometryczna wyznaczników 2-go i 3-go stopnia)
Niech D oznacza równoległobok rozpięty na wektorach ![]()
, ![]()
Pole |D| tego równoległoboku wyraża się wzorem:
.
Niech V oznacza równoległościan rozpięty na wektorach ![]()
, ![]()
, ![]()
Objętość |V| tego równoległościanu wyraża się wzorem:
.
Def. 3.3.4 (dopełnienie algebraiczne)
Niech A = [aij] będzie macierzą kwadratową stopnia n ≥ 2. Dopełnieniem algebraicznym elementu aij macierzy A nazywamy liczbę:
![]()
,
gdzie Aij oznacza macierz stopnia n - 1 powstałą przez skreślenie i-tego wiersza i j-tej kolumny macierzy A.
Tw. 3.3.5 (rozwinięcia Laplace'a wyznacznika)
Niech A będzie macierzą kwadratową stopnia n ≥ 2 oraz niech liczby 1 ≤ i, j ≤ n będą ustalone. Wtedy wyznacznik macierzy A można obliczyć ze wzorów:
1. ![]()
.
Inaczej mówiąc, wyznacznik macierzy jest równy sumie iloczynów elementów i-tego wiersza i ich dopełnień algebraicznych. Wzór ten nazywamy rozwinięciem Laplace'a wyznacznika względem i-tego wiersza.
2. ![]()
.
Inaczej mówiąc, wyznacznik macierzy jest równy sumie iloczynów elementów j-tej kolumny i ich dopełnień algebraicznych. Wzór ten nazywamy rozwinięciem Laplace'a wyznacznika względem j-tej kilumny.
Uwaga. Dla ustalonych liczb 1 ≤ r, s ≤ n, gdzie r ≠ s, prawdziwe są wzory:
.
Inaczej mówiąc, suma iloczynów elementów dowolnego wiersza i dopełnień algebraicznych elementów innego wiersza jest równa 0. Podobnie, suma iloczynów dowolnej kolumny i odpowiadających im dopełniń algebraicznych innej kolumny jest równa 0.
Def. 3.4.3 (wyznacznik macierzy)
Niech A = [aij] będzie macierzą kwadratową stopnia n. Wyznacznikiem macierzy A nazywamy liczbę detA określoną wzorem:
![]()
,
gdzie 
, a sumowanie obejmuje wszystkie (tj. n!) permutacje n-elementowe.
Uwaga. Obie definicje wyznacznika, indukcyjna i permutacyjna, są równoważne.
Def. 3.6.1 (macierz odwrotna)
Niech A będzie macierzą stopnia n. Macierzą odwrotną do macierzy A nazywamy macierz B spełniającą warunek:
AB = BA = In ,
gdzie In oznacza macierz jednostkową stopnia n. macierz odwrotną do macierzy A oznaczamy przez A-1.
Uwaga. Jeżeli macierz A ma macierz odwrotną, to nazywamy ją odwracalną i wówczas detA ≠ 0. Macierz odwrotna do danej macierzy jest określona jednoznacznie.
Def. 3.6.2 (macierz osobliwa i nieosobliwa)
Macierz kwadratową A nazywamy macierzą osobliwą, gdy
![]()
.W przeciwnym przypadku mówimy, że macierz A jest nieosobliwa.
Fakt 3.6.3 (warunek odwracalności macierzy)
Macierz kwadratowa jest odwracalna wtedy i tylko wtedy, gdy jest nieosobliwa.
Tw. 3.6.4 (o postaci macierzy odwrotnej)
Niech macierz A = [aij] stopnia n będzie nieosobliwa. Wtedy
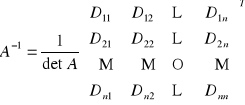
,
gdzie Dij oznaczają dopełnienia algebraiczne elementów aij macierzy A.
Uwaga. Dla macierzy nieosobliwej 
wzór na macierz odwrotną ma postać:
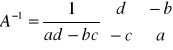
.
Fakt 3.6.5 (własności macierzy odwrotnych)
Niech macierze A i B tego samego stopnia będą odwracalne oraz niech α ∈ C\{0}. Wtedy macierze A-1, AT, AB, αA także są odwracalne i prawdziwe są równości:
1. ![]()
2. ![]()
3. ![]()
4. ![]()
5. ![]()
Fakt 3.7.1 (algorytm Gaussa)
Niech A będzie macierzą stopnia n ≥ 2 o wyznaczniku różnym od zera. Macierz tę można przekształcić do macierzy jednostkowej In wykonując na jej wierszach następujące operacje elementarne:
zamiana między sobą dwóch dowolnych wierszy,
mnożenie dowolnego wiersza przez liczbę różną od zera,
dodawanie do elementów dowolnego wiersza odpowiadających im elementów innego wiersza pomnożonych przez dowolną liczbę.
Macierz jednostkową uzyskamy w dwóch krokach:
I krok. Otrzymanie macierzy trójkątnej górnej z jedynkami na głównej przekątnej postaci:
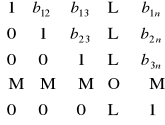
Operacje elementarne wykonujemy tak, aby kolejne kolumny macierzy A uzyskały przedstawioną powyżej postać. Przekształcenia zaczynamy od uzyskania odpowiedniej postaci pierwszej kolumny. Jeżeli a11 ≠ 0, to wiersze w1, w2, …, wn macierzy A przekształacamy kolejno na wiersze ![]()
według wzorów:

.
Jeżeli natomiast a11 = 0, to wiersze macierzy A przestawiamy tak, aby w jej lewym górnym rogu znalazł się element niezerowy i dalej wykonujemy wymienione wcześniej operacje.
Kolejne kolumny z jedynkami na przekątnej i zerami poniżej przekątnej uzyskujemy stosując przedstawione wyżej postępowanie do macierzy coraz niższych stopni, począwszy od stopnia n - 1 aż do stopnia 1 włącznie.
II krok. Otrzymanie macierzy jednostkowej postaci:
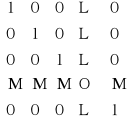
Wiersze ![]()
otrzymanej macierzy trójkątnej przekształcamy kolejno na wiersze ![]()
macierzy jednostkowej w następujący sposób: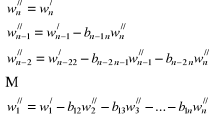
.
Def. 4.1.1 (układ równań liniowych, rozwiązanie układu równań)
Układem m równań liniowych z n niewiadomymi x1, x2, …, xn, gdzie m, n ∈ N, nazywamy układ równań postaci:

,
gdzie aij ∈ R, bi ∈ R dla 1 ≤ i ≤ m, 1 ≤ j ≤ n.
Rozwiązaniem układu równań liniowych nazywamy każdy ciąg (x1, x2, …, xn) n liczb rzeczywistych spełniających ten układ. Układ równań, który nie ma rozwiązań nazywamy układem sprzecznym.
Uwaga. Powyższy układ równanń liniowych można zapisać w postaci macierzowej:
AX = B,
gdzie
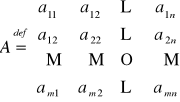
, 
, 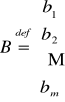
.
Macierz A nazywamy macierzą główną układu równań liniowych, macierz X macierzą (kolumną) niewiadomych, a B macierzą (kolumną) wyrazów wolnych. Rozważa się także układy równań liniowych, w których macierze A, X oraz B są zespolone. W przypadku „małej liczby” niewiadomych będziemy je oznaczać literami x, y, z, t, u, v, w.
Wyszukiwarka
Podobne podstrony:
Geometria analityczna - ściąga, Analiza matematyczna
Twierdzenie Cauchy’ego - ściąga, Analiza matematyczna
sciaga analiza, MATEMATYKA(1)
Analiza matematyczna 2 - ściąga, Analiza matematyczna studia, analiza matematyczna, analiza matematy
Analiza matematyczna 2 ściąga
sciaga kolo1 analiza fin, WTD, analiza matematyczna
ANALIZA MATEMATYCZNA - ściąga, Edukacja, Analiza matematyczna
Analiza matematyczna Teoria sciaga
ANALIZA MATEMATYCZNA sciaga kolo 2
analiza sciaga, studia, Matma, Analiza Matematyczna, analiza, Ściągi
Sciaga Macierz-odwrotna, studia, matematyka
Analiza matematyczna, Analiza matematyczna - wykład, Ściąga z wykładów
sciaga analiza fin, WTD, analiza matematyczna
6643194-sciaga-calki, Studia, Matematyka, Analiza Matematyczna
analiza sciaga, PWR- IŚ, Rok 1, Matematyka, Analiza matematyczna 2.2B
AMwyklady sciaga, WAT, semestr I, Analiza Matematyczna
analiza 2kolo sciaga juz zmniejszona, WTD, analiza matematyczna
więcej podobnych podstron