Inżynieria ruchu drogowego jest dziedziną inżynierii zajmującą się badaniami procesów ruchu drogowego i praktycznym zastosowaniem wiedzy o ruchu w planowaniu, projektowaniu, realizacji i eksploatacji systemów transportu oraz urządzeń komunikacyjnych. Podstawowym celem inżynierii ruchu drogowego jest zapewnienie bezpiecznego, sprawnego i ekonomicznego przemieszczania się osób i towarów przy ograniczeniu ujemnego wpływu transportu na środowisko.
Podstawowe cechy IRD:
Systemowość - człowiek=pojazd=droga=człowiek
Empiryczność - większość praw i zasad rozwiązywania problemów wykryta została i sformułowana na podstawie obserwacji i badan ruchu oraz wypadków
Interdyscyplinarność - np. matematyczne modelowanie ruchu - matematyka; kinematyka i dynamika ruchu pojazdów, akustyka - fizyka; psychologia komunikacyjna - psychologia; skutki wypadków, wpływ hałasy i spalin na zdrowie - medycyna;
Sprzeczność celów
Obszar zainteresowań IRD:
Badania i analizy ruchu
Charakterystyka uczestników procesu ruchu
Pojazd
Człowiek
Droga
Badania ruchu drogowego w skali makro
Powstawanie ruchu
Cel i powód podróży
Zagospodarowanie terenu
Transport zbiorowy
Badania ruchu drogowego w skali mikro
Źródła i cele ruchu
Natężenie ruchu
Prędkości pojazdów
Jakość ruchu
Ruch pieszych
Analizy i interpretacje
Metody statystyczne
EMC specjalistyczne oprogramowanie narzędziowe
Organizacja i zarządzanie ruchem
Zarządzenia i przepisy dotyczące:
Pojazdów
Kierowców
Pieszych
Prędkości
Parkowania
Wyprzedzania
Kierunków ruchu
Urządzenia i środki oddziaływania
Znaki pionowe
Sygnalizacja
Kanalizacja
Przejścia dla pieszych
Zabezpieczenia ruchu (robót)
Bariery ochronne
Zabezpieczanie robót drogowych
Tymczasowa organizacja
Planowanie systemów transportowych
Projektowanie geometryczne dróg i ulic
Urządzenia postojowe
Prawodawstwo, administracja i nadzór ruchu
Środowiskowe
Pogoda - wpływ na widoczność, przyczepność, ciśnienie atmosferyczne, wilgotność, temperaturę
Zagospodarowanie terenu
Geometria drogi
Obecność innych pojazdów
Fizjologiczne i fizyczne
Czas reakcji - przedział czasu upływający od momentu pojawienia się zewnętrznego bodźca, do momentu podjęcia akcji będącej właściwą reakcją na ten bodziec; Złożony czas reakcji: postrzeżenie bodźca - wybór właściwego bodźca - podjęcie odpowiedniej decyzji - właściwa reakcja;
Wzrok - umożliwia ocenę odległości, kształtu, koloru, wielkości; najszybciej dostrzeganym sygnałem świetlnym jest sygnał czerwony, następnie zielony i żółty; jeżeli chodzi o spostrzeżenie tablicy barwnej z odległości 75m najłatwiej dostrzec żółtą, następnie białą, czerwoną, niebieską, zieloną i czarną
Słuch - człowiek szybciej reaguje na bodźce dźwiękowe niż wizualne
Równowaga
Psychologiczne - mają wpływ na zachowanie się człowieka:
Motywacja podróży
Inteligencja - warunkuje możliwość przystosowania się użytkownika do danych warunków ruchu
Temperament
Doświadczenie i nawyki - nawyk to stadium samoczynnej koordynacji pomiędzy wzrokiem, słuchem i dotykiem a wykonywana czynnością motoryczną
Charakter - np. dokładność, odpowiedzialność, sumienność
Czynnik emocjonalne - np. zdolność koncentracji
Dojrzałość
Zmęczenie spowodowane brakiem snu, hałasem, długotrwałą koncentracja uwagi
Monotonia drogi
Niewygodna pozycja
Alkohol, narkotyki, leki
Choroby
Oświetlenie
Pora doby
Należy unikać projektowania dróg monotonnych
Tor jazdy powinien być wyznaczony jednoznacznie
Rozwiązania organizacji ruchu na drodze nie mogą zmuszać kierowcy do równoczesnego podejmowania kilku decyzji
Lokalizacja znaków musi uwzględniać ograniczenia kąta ostrego widzenia
Unikanie lokowania przy drogach reklam rozpraszających uwagę
Wielkość, kształt, kolor i liczba znaków powinny być zgodne z wymogami postrzegania
Oświetlenie drogi i ulic powinno charakteryzować się ciągłością i równomiernością
Czynniki związane z geometrią drogi:
Szerokość jezdni, liczba i szerokość pasów ruchu
Szerokość poboczy, chodników, pasów zieleni
Przeszkody boczne i ich oddalenie od krawędzi jezdni - np. podpory wiaduktu, barierki, drzewa
Rozwiązanie jezdni (jednoprzestrzenna, dwie jezdnie)
Dodatkowe pasy ruchu
Przebieg drogi w planie i profilu
Konfiguracja terenu określająca widoczność drogi
Czynniki związane z ruchem i jego organizacją:
Struktura kierunkowa ruchu, obciążenie ruchem poszczególnych pasów ruchu
Prędkość ruchu, warunki w jakich ruch się odbywa
Wahania ruchu
Parkowanie
Organizacja ruchu na jezdni, oznakowanie poziome
Obecność przystanków komunikacji zbiorowej, ich lokalizacja i rozwiązanie
Kolizje z ruchem pieszych
Obecność sygnalizacji świetlnej
Struktura rodzajowa ruchu
Poprawa punktualności i regularności kursowania pojazdów
Utrzymaniu ciągłości ruchu i wysokiej niezawodności działania
Zmniejszenie czasów podróży, a zwłaszcza oczekiwana i przesiadek
Zapewnienie pasażerom informacji o charakterze okresowym (np. rozkład jazdy) jak i bieżącej (czas przybycia i nazwa najbliższego przystanka, połączenia przesiadkowe, zakłócenia i przerwy w ruchu)
Podniesienie bezpieczeństwa pasażerów, skrócenie czasu usuwania skutków awarii, wypadków itp.
Ułatwienie pracy służbom eksploatacyjnym, zmniejszenie zmęczenie wywołanego żmudnymi czynnościami rutynowymi
Lepsze wykorzystanie taboru będącego w dyspozycji przedsiębiorstwa, zwiększenie zdolności przewozowej linii i sieci komunikacyjnej.
Zakorkowane ciągi ulic i rejony miast
Przepełnione parkingi i brak miejsc postojowych w centrach miast przy niezapełnionych parkingach w rejonach peryferyjnych
Nierównomierne wykorzystanie komunikacji miejskiej w różnych porach dnia
Ruch w poszukiwaniu miejsc do parkowania w obrębie śródmieścia
Wysoki stopień hałasu i emisji zanieczyszczeń w obszarach o dużym nasyceniu ruchem
Zła dostępność celów w mieście
Pogorszenie jakości funkcjonowania miasta
Ograniczone możliwości inwestowania i przeznaczania terenu na cele komunikacyjne
Brak informacji lub niepełna informacja o ruchu
Rosnący ruch prywatny i służbowy
Zmiany w podejściu do ruchu w polityce komunikacyjnej władz miejskich
Niska atrakcyjność transportu publicznego
Nadmierne zatłoczenie dróg i ulic w miastach
Śladowe stosowanie systemów zarządzania ruchem w miastach
Wysoki stopień zanieczyszczenia powietrza i hałas
Unikanie zbędnych podróży
Rozgęszczanie ruchu, którego nie da się uniknąć
Zmniejszanie uciążliwości ruchu dla środowiska
Optymalna informacja dla użytkowników dróg (przed i w czasie podróży)
Zwiększenie efektywności sterowania ruchem (potoki pojazdów)
Poprawa infrastruktury drogowej
Polepszenie środków transportu publicznego
Obserwacja lokalna:
Obserwacja chwilowa:
Znaki poziome
Jak zmieniał się obszar zainteresowania IRD? Na początku swej historii IRD zajmowała się planowaniem geometrycznym i projektowaniem ulic oraz organizacją ruchu celem uczynienia go bezpiecznym, dogodnym i ekonomicznym. W latach następnych IRD zajęła się również pomiarem ruchu, badaniem praw jego powstawania i wykorzystaniem nabytej w ten sposób wiedzy w jego organizacji. Obecnie obszar zainteresowania IRS objął również ograniczenie ujemnego wpływu ruchu na środowisko; Dlaczego IRD jest empiryczną dziedziną wiedzy? IRD jest empiryczną dziedziną wiedzy ponieważ większość praw i zasad została wykryta i sformułowana na podstawie obserwacji i badań ruchu oraz wypadków; Na czym polega sprzeczność celów IRD? Podstawowym celem inżynierii jest zapewnienie bezpiecznego, sprawnego i ekonomicznego przemieszczania się osób i towarów przy ograniczeniu ujemnego wpływu transportu na środowisko. Te kryteria często są sprzeczne. Jeśli transport jest bezpieczny, może nie być sprawny; jeśli jest przyjazny dla środowiska, może być nieekonomiczny
Czynniki wpływające na zachowanie się uczestników ruchu:
Czynniki wpływające na czas reakcji:
Dostateczne pole widzenia
Prędkość pojazdu [km/h] |
Odległość koncentracji wzroku [m] |
Kąt widzenia pionowego [0] |
Kąt widzenia poziomego [0] |
0 |
75 |
~115 |
~160 |
32 |
250 |
~70 |
~110 |
96 |
540 |
~25 |
~40 |
Wnioski dotyczące użytkowników dróg:
Przepustowość - teoretycznie określana największa liczba pojazdów jaka w określonych warunkach geometrycznych i ruchowych oraz w dogodnych warunkach atmosferycznych z zachowaniem bezpieczeństwa ruchu może przejechać przez określony przekrój jezdni; Przepustowość podstawowa (wyjściowa) - największa liczba pojazdów, jaka może w idealnych warunkach geometrycznych i ruchowych przejechać przez określony przekrój; Przepustowość projektowa (natężenie krytyczne) - największa liczba pojazdów, które mogą w ciągu godziny przejechać przez badany przekrój jezdni z zachowaniem warunków charakterystycznych dla wybranego poziomu swobody ruchu
Warunki ruchu drogowego - zespół czynników określających jakość sytuacja drogowo - ruchowej, w której znajduje się użytkownik drogi; Poziomy swobody ruchu - jakościowa zmiana warunków ruchu uwzględniająca odczucia kierowców i innych użytkowników drogi. Cały zakres warunków ruchu jest podzielony na 6 klas swobody ruchu oznaczonych dużymi literami od A do F, gdzie poziom swobody A odpowiada najlepszym, a F najgorszym warunkom ruchu.
Opisy ruchu w poszczególnych poziomach swobody ruchu:
A - ruch swobodny, duża swoboda wyboru prędkości i manewrowania
B - ruch równomierny, prędkość podróży i swoboda manewrowania ograniczone w niewielkim stopniu
C - ruch równomierny, wybór prędkości wyraźnie ograniczony; manewry wymagają dużej uwagi ze względu na obecność innych pojazdów
D - ruch nierównomierny, wybór prędkości i manewrów jest bardzo ograniczony, a komfort jazdy niski. Chwilowe wzrosty natężenia powodują zakłócenia ruchu
E - ruch nierównomierny, natężenie ruchu odpowiada przepustowości drogi. Prędkość ustabilizowana na stosunkowo niskim poziomie. Manewrowanie odbywa się jedynie na zasadzie wymuszenia. Niewielki wzrost natężenia lub chwilowe zatrzymanie ruchu prowadzą do poważnych zakłóceń
F - ruch wymuszony; takie warunki następują tylko w przypadku gdy natężenie ruchu dojeżdżającego do danego przekroju drogi przekracza jej przepustowość. Mała prędkość, zatrzymania ruchu, zaś w skrajnych przypadkach natężenie i prędkość spadają do zera.
Procent czasu blokowania - jest określany jako średni procent łącznego czasu podróży w którym pojazdy jadąc w kolumnie ponoszą straty na wskutek braku możliwości wyprzedzenia;
Wpływ na przepustowość dróg:
Cztery grupy metod wyznaczania przepustowości:
Wyznaczenie przepustowości odcinków międzywęzłowych
Określenie długości odcinków przeplatania
Określenie przepustowości wlotów skrzyżowań niesterowanych
Przepustowość wlotów skrzyżowań sterowanych
Przepustowość skrzyżowań sterowanych - to liczba pojazdów które w pewnym przedziale czasu mogą przejechać przez to skrzyżowanie. Jest zależna od czasów otwarcia wlotów i od maksymalnej intensywności z jaką pojazdy mijają linie stop w czasie trwania sygnału zielonego; Intensywność nasycenia - to taka intensywność ruchu określona na linii stop, która byłaby osiągnięta gdyby na wlocie ciągle istniała kolejka, a sygnał zielony przeznaczony dla tych pojazdów stanowił 100% długości cyklu.
System zarządzania - systemem nazywamy zbiór elementów i wiążących je relacji przydatnych do opisu i kształtowania wybranego fragmentu rzeczywistości. System zarzadzania ruchem pojazdów to zbiór zintegrowanych metod i środków oddziaływania na ich ruch na podstawie informacji o jego aktualnym stanie i środowisku;
Cele zarządzania komunikacją zbiorową:
Zarządzanie ruchem pojazdów - sposób wykorzystania pojedynczych pojazdów aby osiągnąć cele sformułowane przez politykę transportową przedsiębiorstwa i miasta; Kryteria optymalizacji: - minimalizacja odchyleń od rozkładu jazdy, - maksymalizacja zysków, - reagowanie na sytuacje nietypowe (wypadki, zatory itp.); są dwie warstwy zarządzania ruchem pojazdów: wewnętrzna - realizowana przez służby ruchu przedsiębiorstwa komunikacyjnego, to znaczy działania dyspozytorskie - związane z rozmieszczeniem i przemieszczaniem taboru w czasie i przestrzeni, zewnętrzna - realizowana przez organizatora ruchu drogowego - związana z uprzywilejowaniem pojazdów komunikacji zbiorowej w sieci ulic
Symptomy zapaści ruchowej:
Przyczyny zapaści ruchowej:
Przesłanki tworzenia systemów zarządzania
Podstawowe cele działania:
Zadania dla realizacji celów:
Przebieg prędkości v(t) to wykres zmian prędkości pojazdu w kolejnych chwilach czasu przejazdu przez dany odcinek drogi; Profil prędkości v(x) to wykres zmian prędkości pojazdu wzdłuż odcinka drogi, po którym porusza się pojazd; Rodzaje obserwacji ruchu drogowego: 1. Lokalna - obserwator stoi w miejscu, rejestruje pojazdy przekraczające przekrój jezdni; 2. Chwilowa - obserwator wykonuje zdjęcie pokazujące stan ruchu w danej chwili; 3. Ruchoma - obserwator przemieszcza się w czasie i przestrzeni; 4. Quazilokalna - dwa pomiary wykonywane obok siebie; 5. Quazichwilowa - dwa zdjęcia jedno po drugim lub zapis na kamerze; Parametr ruchu drogowego: to wielkość charakterystyczna dla procesu ruchu, na ogół będąca wartością zmienną, których zbiór tworzy próbę; Estymator ruchu drogowego: parametr obliczony z próby w celu scharakteryzowania populacji wyników, będący konkretną wartością, stosowany do prezentacji wyników;
Współczynniki przeliczeniowe pojazdów rzeczywistych i umownych wyrażają zróżnicowane własności techniczno-ruchowe różnych rodzajów pojazdów, w stosunku do samochodu osobowego, przyjętego za umowny pojazd porównawczy. Umożliwiają przeliczenie natężenie ruchu wyrażonego w pojazdach rzeczywistych (P) na natężenie w pojazdach umownych (E). Współczynniki te wprowadzone zostały, aby ujednolicić strukturę strumienia pojazdów, co umożliwia policzenie takich wielkości jak przepustowość. Zależą od cech strumienia cech zachowania pojazdów i ich parametrów (zajmowany obszar, przyspieszenie, liczba pasażerów, dynamika);
Parametry opisujące wielkość strumienia w obserwacji chwilowej i lokalnej: 1. Chwilowej: - odstępy drogi między pojazdami: Δx; - strumień jednostkowy pojazdów: Ψxi(t); - liczba pojazdów: N(ti, xo, x1); - gęstość strumienia ruchu: k ; - koncentracja strumienia ruchu: Hti (x) [poj/m]; 2. Lokalnej: - odstępy czasu między pojazdami: Δt; - strumień jednostkowy pojazdów: Φxi(t); - liczba pojazdów: M(xi , to , t1); - natężenie strumienia ruchu: q; - intensywność strumienia ruchu:λ xi (t) [poj/s]; Parametry wykorzystywane do wyznaczania poziomów swobody ruchu: - gęstość ruchu [P/km/pas]; - średnia prędkość podróży [km/h]; - intensywność ruchu [P/h]; - procent czasu blokowania [%]; - prędkość ruchu swobodnego [km/h]; - wykorzystanie przepustowości
Wady i zalety sygnalizacji świetlnej: 1. Zalety: - podporządkowanie ruchu i ułatwienie jazdy kierowcom; - zwiększenie przepustowości wlotów; - zmniejszenie liczby wypadków niektórych rodzajów; - umożliwienie przejazdu pojazdów lub przejścia pieszym przez ulicę o dużym natężeniu; - zmniejszenie strat czasu; - zmniejszenie kosztów transportu; 2. Wady - wzrost strat czasu w okresach bardzo słabego ruchu; - wzrost liczby wypadków niektórego rodzaju; - zakłócenia ruchu w przypadku awarii sygnalizacji
Odcinek międzywęzłowy - odcinek autostrady, na którym ruch odbywa się w sposób niezakłócony włączaniem się do ruchu, wyłączaniem się z ruchu lub przeplataniem.
Związek prędkości odcinkowej i prędkości podróży:

, gdzie:
![]()
wartość średnia prędkości odcinkowej
![]()
wartość średnia prędkości podróży
![]()
wartość średnia wariancji prędkości podróży
Prędkość odcinkowa jest większa, oprócz sytuacji w której pojazd porusza się ze stałą prędkością
Związek między wartościami oczekiwanymi prędkości pojazdu w obserwacjach chwilowych i lokalnych:
, gdzie:
El(v) - wartość oczekiwana prędkości w obserwacji lokalnej
Em(v) - wartość oczekiwana prędkości w obserwacji chwilowej
![]()
- wariancja wartości oczekiwanej prędkości w obserwacji chwilowej
Parametry opisujące przemieszczanie się pojazdów w obserwacji lokalnej i chwilowej:
gl(v) - funkcja gęstości prawdopodobieństwa rozkładu prędkości
Gl(v) - dystrybuanta rozkładu prędkości
- wartość oczekiwana prędkości strumienia
![]()
- średnia wartość prędkości (estymator)
gm(v) - funkcja gęstości prawdopodobieństwa rozkładu prędkości
Gm(v) - dystrybuanta rozkładu prędkości
- wartość oczekiwana prędkości
![]()
- średnia wartość prędkości (estymator)
Podstawowe równanie ruchu drogowego:
λ = κEm(v), gdzie:
λ - intensywność strumienia ruchu
κ - koncentracja strumienia ruchu
Em(v) - wartość oczekiwana prędkości w obserwacji chwilowej
Zasada wyznaczania przepustowości odcinków międzywęzłowych:
![]()
gdzie:
fq - współczynnik uwzględniający poziom swobody ruchu zależny od prędkości projektowej pożądanego poziomu swobody ruchu;
fp - wpływ szerokości pasa i odległości przeszkód bocznych;
fCA - współczynnik uwzględniający obecność samochodów ciężarowych i autobusów
fzd - współczynnik znajomości drogi;
dla wielu n pasów ruchu w HCM:
![]()
Cov = 2000 poj/h dla vproj ≥100 km/h - przepustowość wyjściowa
Cov = 1900 poj/h dla vproj < 100 km/h - przepustowość wyjściowa
n - liczba pasów w jednym kierunku
Zasada wyznaczania przepustowości skrzyżowań sterowanych sygnalizacją:
![]()
S - intensywność nasycenia
g - efektywność sygnału zielonego
c - ilość cykli
Rysunek i interpretacja statycznej charakterystyki strumienia pojazdów:
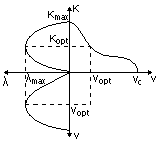
Wraz ze wzrostem koncentracji ruchu κ maleje jego prędkość v. Koncentracja zmienia się w granicach od 0 (kiedy intensywność λ jest równa 0 i ruch nie występuje) do pewnej maksymalnej wartości κmax (odpowiadającej sytuacji, gdy samochody stoją w korku, a prędkość jest równa 0). Pomiędzy tymi granicami znajduje się koncentracja optymalna κopt przy której występuje maksymalna intensywność strumienia λmax, równa przepustowości drogi. Sytuacja ta zachodzi przy pewnej optymalnej prędkości vopt. Przy większej koncentracji strumienia ruch jest wymuszony i odbywa się z mniejszą prędkością.
Wyszukiwarka
Podobne podstrony:
Średniowiecze to okres rozwoju malarstwa przede wszystkim na?sce
Darmowa wyszukiwarka - styl tiger, ► WSZYSTKO NA CHOMIKA POMOC
egza-Ib, Notatki Rolnictwo, 4 rok, IV rok, Wszystko na SZUR
Wszystko na sprzedaż
5[1].Wszystko na raz...
SONDA LAMBDA WSZYSTKO NA TEMAT BMW?4
Mikroby 2008 Stomatologia st, 3 rok stoma, mikroby i immuny, mikro wszystko na egz
SZUR, Notatki Rolnictwo, 4 rok, IV rok, Wszystko na SZUR
pp wszystko na pierwsze koło, studia, semestr I, PP
CAN (wszystko na temat magistrali CAN)
F1, ► WSZYSTKO NA CHOMIKA POMOC
sciaga kolo 2, Budownictwo UWM, Materiały budowlane wszystko na egzamin
Wszystko na tym świecie jest przemijające i nietrwałe, Buddyzm, Teksty
wszystko na temat oświecenia
WSZYSTKO NA GRAFIKE
Torcik- Chlewik, Przepisy, Ciasta - TORTY inne niż wszystkie- na różne okazje, rocznice
szur-IW, Notatki Rolnictwo, 4 rok, IV rok, Wszystko na SZUR
Tort na roczek, Przepisy, Ciasta - TORTY inne niż wszystkie- na różne okazje, rocznice
więcej podobnych podstron