Cel ćwiczenia
Celem ćwiczenia było zbadanie możliwości doboru nastaw regulatorów składających się z różnych członów (konfiguracje: P, PI, PD, PID). Ćwiczenie laboratoryjne składało się z trzech składowych:
Wykonaniu 3 symulacji dla każdej ze wskazanych przez prowadzącego nastaw
Próbie regulacji członu przy pomocy regulatora całkującego
Próbie regulacji członu przy użycie regulatora PID.
Zadanie pierwsze
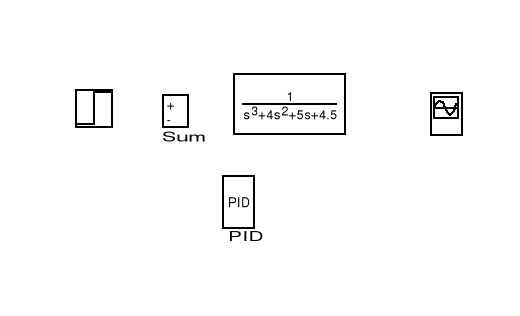
Model układu dla regulatora proporcjonalnego
Poniżej przedstawiono krzywe dla różnych wartości współczynnika wzmocnienia regulatora.
k = 4
k = 0,5
k = 20
Widać, że wraz wzrostem współczynnika k maleje amplituda sygnału. Czas wyrównania sygnału jest zbliżony dla każdego z przypadków.
Charakterystyki dla regulatora proporcjonalno - całkującego dla różnych wartości współczynników k oraz Ti (czasu zdwojenia).
k = 4
Ti = 0.3
k = 0.3
Ti =4
k = 2
Ti = 10
Zauważono, iż dla pierwszej krzywej współczynniki zostały dobrane niewłaściwie. Obiekt zachowywał się niestabilnie (charakterystyka rozbiegała się). W pozostałych przypadkach współczynniki dobrano właściwie. Zauważono, iż współczynnik k odpowiadał głównie za wartość amplitudy sygnału zaś Ti za wartość czasu po którym wartość sygnału przyjmowała wartość równą zeru.
Charakterystyki dla regulatora proporcjonalno - różniczkującego w zależności od różnych wartości współczynników k oraz Td (czas wyprzedzenia).
k = 2
Td=2
k = 2
Td = 22
k = 0.5
Td = 2
Z powyższych charakterystyk wynika, iż wraz ze wzrostem współczynnika Td, rośnie czas po jakim sygnał osiągnie stałą wartość.
Charakterystyki dla regulatora PID
k = 2
Ti= 2
Td = 2
Ti = 10
Td = 1
k = 2
k=2
Ti = 0.5
Td =10
k = 4
Ti = 0.5
Td =3
k = 10
Ti = 0.5
Td = 3
Wykonano więcej charakterystyk celem dokładniejszego zaobserwowania wspływu poszczególnych współczynników na przebieg całej charakterystyki.
Zadanie drugie
Celem tego zadania było sprawdzenie możliwości regulowania sygnału przy użyciu członu całkującego. Tym celem wykonano charakterystyki dla różnych wartości zmiennej X.
Poniżej model układu zaprojektowanego do badań.
Charakterystyki dla następującej wartości zmiennych:
X = 0.5
X = 1
X = 0.005
Każda z otrzymanych charakterystyk uzyskanych dla regulatora całkującego rozbiega się wraz z upływem czasu. Świadczy to o tym, iż ten typ regulatora nie nadaje się do regulacji sygnału (działając samodzielnie).
Zadanie trzecie
Celem ostatniego zadania była próba dostrojenia regulatora PID poprzez dobranie jak najkorzystniejszych wartości współczynników k, Ti oraz Td. Zamieszczone w tym punkcie wykresy ilustrują drogę do osiągnięcia celu.
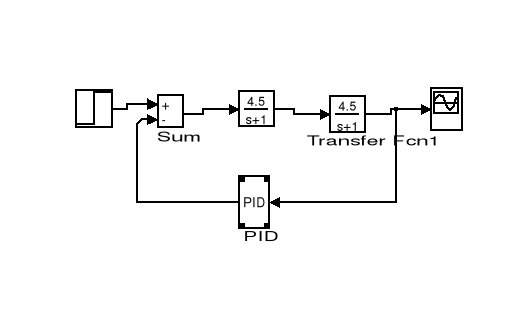
Poniżej model układu wykorzystanego do badań.
Charakterystyki dla kombinacji współczynników wykorzystanych przez studentów.
k = 3; Ti = 100; Td = 5
k = 0; Ti = 0.1; Td = 2
k = 2; Ti = 5; Td = 3
k = 2; Ti = 2; Td = 3
k = 2; Ti = 1; Td = 3
k = 2; Ti = 1; Td = 1
Najlepszą regulację uzyskano dla danych z ostatniego wykresu. Maksymalna wartość sygnału wyniosła ok. 0,15 zaś czas po jakim osiągnął on wartość równą 0 był mniejszy niż 15 sekund.
Wnioski
Podczas realizacji zadania nr 1 zauważono, iż poszczególne człony mają wpływ na przebieg regulowanych charakterystyk:
Współczynnik „k” odpowiedzialny jest za wartość amplitudy sygnału.
Współczynnik „Td” pośrednio decyduje o okresie czasu po którym sygnał osiągnie stałą wartość.
Współczynnik Ti informuje po jakim czasie wartość sygnału osiągnie 0.
Człon całkujący jako jedyny regulujący układ nie spełnia zamierzonej funkcji. Powoduje bowiem rozbieganie się sygnału wraz ze wzrostem upływającego czasu (niestabilność układu)
Regulator PID daje największe możliwości regulacji spośród wszystkich badanych regulatorów. Zwiększanie/zmniejszanie wartości poszczególnych współczynników decyduje o tym, który z członów ma największe znaczenie podczas regulacji.
Zauważono, iż dla mniejszych wartości współczynników uzyskuje się lepszą regulację.
Wyszukiwarka
Podobne podstrony:
5A, Politechnika Wrocławska, Automaty lab
automaty 5a, Politechnika Wrocławska Energetyka, zal spr
D1, Politechnika Wrocławska, Automaty lab
6A, Politechnika Wrocławska, Automaty lab
11A, Politechnika Wrocławska, Automaty lab
strona tyt 2A, Politechnika Wrocławska Energetyka, IV semestr, Automatyka LAB
cw2A, Politechnika Wrocławska, Automaty lab
A6, Politechnika Wrocławska, Automaty lab
automaty 4a, Politechnika Wrocławska, Automaty lab
A1, Politechnika Wrocławska, Automaty lab
Zagad NE09, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elekt
automatyka i robotyka-rozwiazania, Politechnika Wrocławska - Materiały, podstawy automatyki i roboty
sc5 druk, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elektro
SC3, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elektrotechn
Eegzamin zagadnienia cz1, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro,
sciaga elektra, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy e
AiR 2013 zima (1), Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem5, automaty
więcej podobnych podstron