ZAKŁAD TEORII MASZYN
I PODSTAW AUTOMATYKI
Projekt mechanizmu
korbowo -suwakowego
Lesiczka Sławomir
Wydział Inżynierii
Mechanicznej i Robotyki
Rok II Gr.10
Rok akadem.99/2000
Analiza kinematyczna i kinetostatyczna mechanizmu dźwigniowego.
Zakres opracowania:
Analiza strukturalna mechanizmu.
Obliczyć ruchliwość i określić klasę mechanizmu.
Analiza kinematyczna mechanizmu.
Zamodelować mechanizm w programie AKM i przeprowadzić analizę kinematyczną.
Wyznaczyć prędkości i przyśpieszenia liniowe oznaczonych na rys. punktów mechanizmu oraz prędkości i przyśpieszenia kątowe członów metodą grafoanalityczną (metodą planów).
Wyznaczyć prędkości i przyśpieszenia liniowe oznaczonych na rys. punktów mechanizmu oraz prędkości i przyśpieszenia kątowe członów metodą analityczną.
Porównać wyniki obliczeń kinematycznych dla zadanego położenia mechanizmu (wyniki zestawić w tablicy).
Analiza kinetostatyczna
Przyjąć masę i momenty bezwładności względem środka masy dla wskazanych członów oraz siłę oporu P.
Obliczyć siły bezwładności i momenty od sił bezwładności.
Wyznaczyć reakcje w parach kinematycznych i moment równoważący - MRI = MRI( Pi, Bi, MBi) przyłożony do członu napędzającego, mechanizmu metodą grafoanalityczną.
Sprawdzić obliczenia momentu równoważącego metodą porównania mocy chwilowych.
Zgodnie z numerem i wariantem liczbowym zadania przyjęto wymiary i położenie jak na rys.1
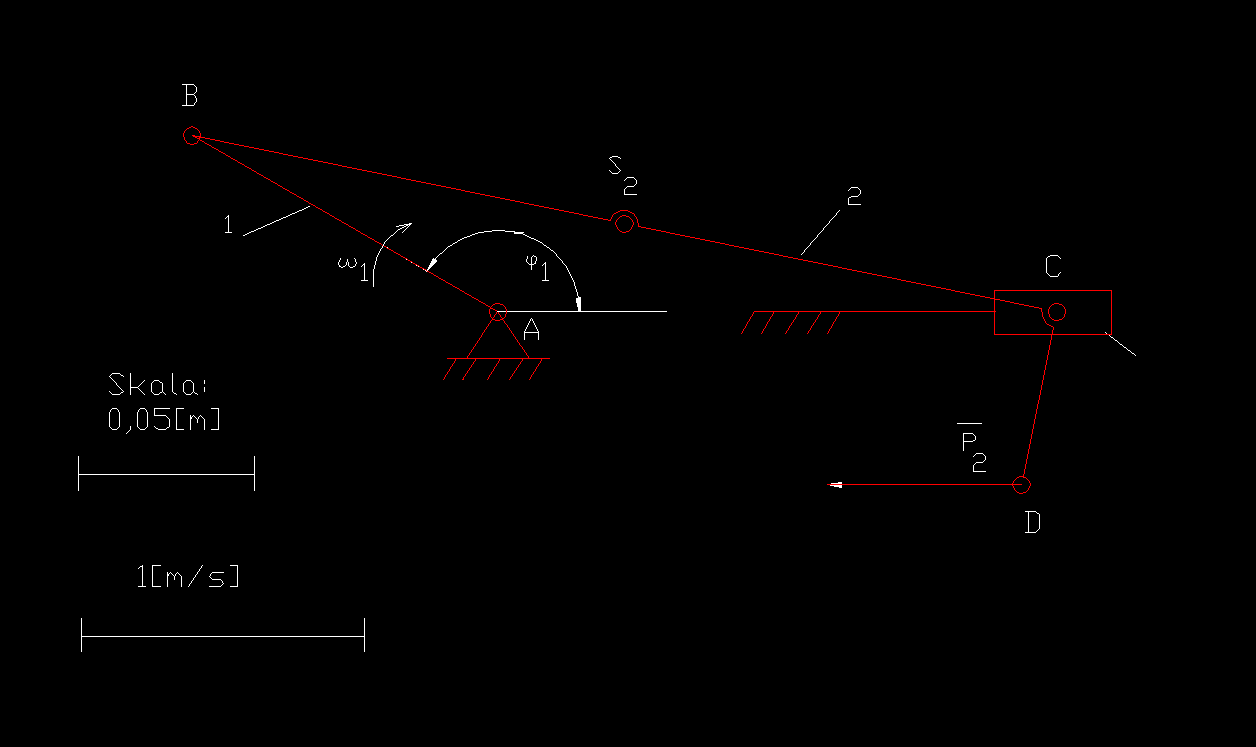
Prędkość: ω1= - 40[1/s]
Położenie: φ1= 150o
Założenia:
1. Wymiary:
AB=0,10 [m]
BC=0,25 [m]
CD=0,05 [m]
2. Masa i moment bezwładności:
m2=2 [kg]
JC2=1/3· m2·Bl2=2/3·0,252=0,0417 [kg·m2]
3. Położenie środka masy.
Założono Równoramienny rozkład masy na długości odcinka
BC.
BS2=1/2BC=O,125 [m]
Wartość siły zewnętrznej.
P2=100 [N]
Analiza strukturalna
Ruchliwość i klasa mechanizmu
n = 3 ruchome człony
pv=4 ilość par kinematycznych klasy V
w= 3n-∑(i-3)pi = 3∙3 - (5-3)4=1
wGrupy=3∙2 - (5-3)3 = 0
Analizowany mechanizm jest mechanizmem klasy II.
2. Analiza kinematyczna.
Na podstawie przeprowadzonej analizy strukturalnej ustalono, że model mechanizmu musi zawierać człon napędzający oraz grupę oznaczoną w programie AKM symbolem -N-(O-O-P).
Po ustaleniu wymiarów przeprowadzono symulację ruchu mechanizmu (moduł Animacja) oraz analizę kinematyczną (moduł Wykresy).
Analiza kinematyczna mechanizmu - metoda grafoanalityczna (metoda planów).
Analiza prędkości i przyspieszeń.
VC=VB+VCB
VB= ω1∙AB = 40∙0,1 = 4 [m/s]
Odczytano:
V= 1,29 [m/s]
V= 3,54 [m/s]
![]()
VS2=VB+VS2B
VS2B=ω2·BS2 =14,16·0,125=1,77 [m/s]
Odczytano:
VS2=2,39 [m/s]
VD= VB+VDB
VDB=ω2·BD=14,16·0,255=3,61 [m/s]
Odczytano:
VD=0,61 [m/s]
aC=aB+aτCB+anCB
aB=ω21·AB=402·0,1=160 [m/s2]
anCB=ω22 BC=14,162 ·0,25=50,13 [m/s2]
Odczytano:
aC=103,73 [m/s2]
aτCB=71,42 [m/s2]
aCB=87,25 [m/s2]
![]()
aS2=aB+aτS2B+anS2B
anS2B=ω22·BS2=14,162·0,125=25,06 [m/s2]
aτS2B=ε2·BS2=285,68·0,125=37,71 [m/s2]
Odczytano:
aS2=127,58 [m/s2]
aD=aB+aτDB+anDB
anDB=ε2·BD=285,68·0,255=72,85 [m/s2]
anDB=ω22·BD=14,162·0,255=51,13 [m/s2]
Odczytano:
aD=119,93 [m/s2]
Podziałki przyśpieszeń i prędkości przedstawione zostały na załączonych rysunkach.
Prędkości i przyśpieszenia.
(metoda analityczna)
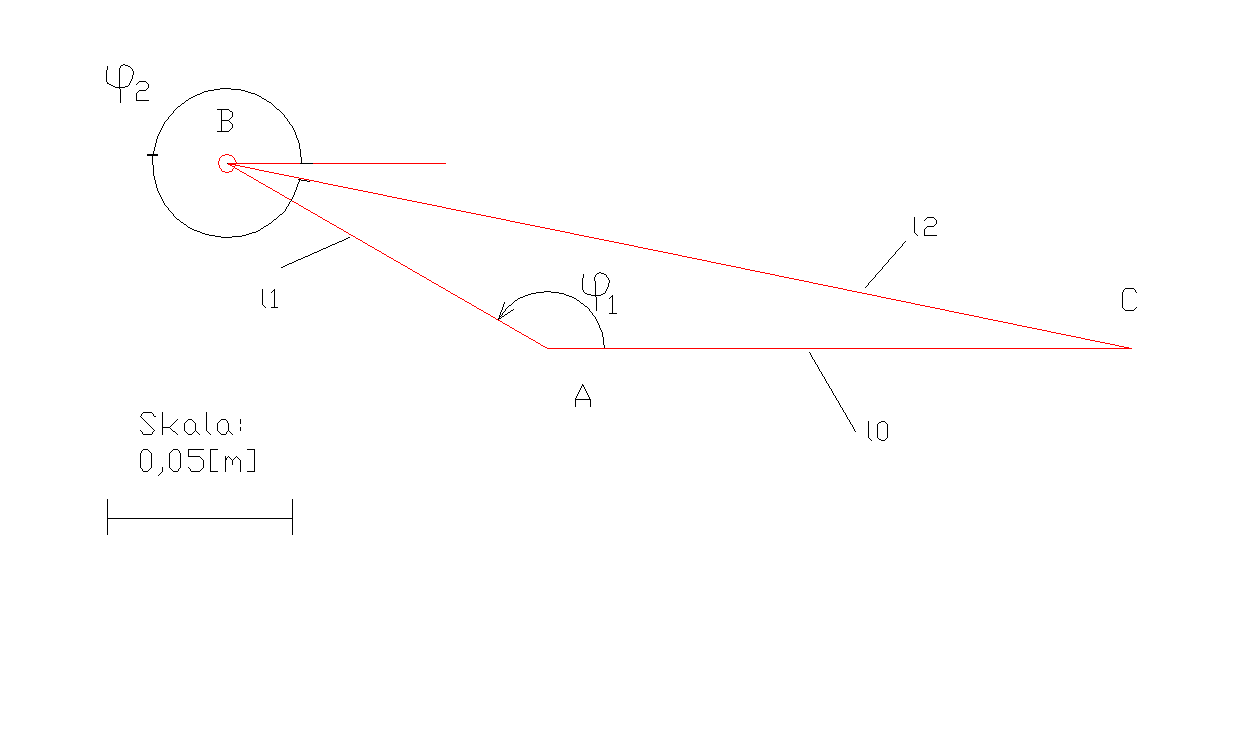
l1=0,10 [m]
l2=0,25 [m]
φ1=150o
φ0=180o
ω1= -40 [1/s]
Σli=l0+l1+l2=0
Σlix=l0cosφ0+ l1cosφ1+ l2cosφ2=0
Σliy=l0sinφ0+ l1sinφ1+ l2sinφ2=0
-l0+l1cosφ1+ l2cosφ=0
l1sinφ1+ l2sinφ2=0
![]()
φ2=348,463o
lo= l1cosφ1+ l2cosφ2=0,1·cos150o+0,25·cos348,463o=0,158 [m]
Prędkości:

![]()
![]()
![]()
-vC-l1·ω1sinφ1- l2·ω2sinφ2=0
l1·ω1cosφ1+ l2·ω2cosφ2=0

ω2=-14,142 [1/s]
-vC=l1·ω1sinφ1+ l2·ω2sinφ2 -vC=0,1·(-40)sin150o+0,25·(-14,142)sin348,463o
vC=1,293 [m/s]
Przyśpieszenia:




aC-l1· ω21cosφ1-l2· ε2sinφ2-l2· ω22cosφ2=0
-l1·ω21sinφ1+l2·ε2cosφ2-l2·ω22sinφ2=0
![]()
![]()
ε2=285,774 [1/s2]
aC=l1· ω21cosφ1+ l2· ω22cosφ2+l2·ε2sinφ2
aC=0,1(-40)2cos150o+0,25(14,142)2cos348,463o+
+0,25·285,774sin348,463o
aC= -103,86 [m/s2]
Porównanie wyników analizy kinematycznej:
|
Metoda planów |
Metoda analityczna |
AKM |
vB |
4 |
-4 |
4 |
vC |
1,29 |
-1,292 |
1,292 |
vD |
0,61 |
- |
0,616 |
vS2 |
1,77 |
- |
2,397 |
ω1 |
40 |
-40 |
-40 |
ω2 |
14,16 |
14,142 |
14,14 |
aB |
160 |
160 |
160 |
aC |
103,73 |
-103,86 |
103,86 |
aD |
119,93 |
- |
120,06 |
aS2 |
127,58 |
- |
127,38 |
ε2 |
285,68 |
285,774 |
285,7 |
Analiza kinetostatyczna.
Masa, moment bezwładności i siła zewnętrzna
Przyjęto w założeniach.
Siła bezwładności i moment od sił bezwładności.
B2 = m2aS2 = 2·127,58=255,16 [N]
MB2 = JC2·ε2=0,0417·285,68=11,91 [Nm]
Reakcja w parach kinematycznych i moment równoważący.
ΣPi=Pn12+ Pτ12+P2+B2+P03=0
ΣMC(2)= Pτ12·BC-0,0167B2-0,049P2-MB2=0
Pτ12=![]()
(0,0167B2+0,049P2+MB2)
Pτ12=![]()
(0,0167·255,16+0,049·100+11,91)
Pτ12=84,28 [N]
Odczytano:
P12 = 376,12 [N]
Pn12=366,56 [N]
P03 = 75,88 [N]
Mr= P12·0,0096=3,6 [Nm]
Moment równoważący, porównanie mocy chwilowych.
ΣNi= Mr·ω1+B2vS2cos115,27o+P2·vDcos167,07o+MB·ω2=0
Mr= -![]()
(B2vS2cos115,27o+ P2·vDcos167,07o+ MB· ω2)
Mr = - ![]()
(255,16·1,77cos115,27o+100·0,61cos167,07o+11,91·14,16)
Mr=2,09 [Nm]
Duży błąd względny wynika z stosowanych przybliżeń oraz ustawienia mechanizmu. Nominalny Mr jest znacznie większy.
Wyszukiwarka
Podobne podstrony:
TMM Projekt 4.3, Domumenty, Studia, Studia, 2 rok, tmm, projekty, Projekty, Projekty TMM, Inne, 6 (4
MOMENT~2, Domumenty, Studia, Studia, 2 rok, PKM, PKM - różne projekty, Projekty
Upow.do wylozenia projektu operatu 31 03 03, studia, rok II, EGiB, od Pawła
kredki sc 2 sem, Studia, IV rok, PST, Projektowanie struktur terenowych
OBLICZENIA DO WYIESIENIA PROJEKTU W TERENIE, studia, rok III, geo inż, od Marzeny
Projekt X, Studia, 1 rok, WDS
Projekt 2 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Projekt 1 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
semestr II, Studia, IV rok, PST, Projektowanie struktur terenowych
projekt sip przyklad, Studia, 3 rok, semestr 5, semestr 6 SPRAWKA
Dane techniczne projektu lotu, studia, rok III, fotogrametria, od Łukasza
Âci-ga na egzamin, Studia, IV rok, PST, Projektowanie struktur terenowych
opracowanie-sciaga, Studia, IV rok, PST, Projektowanie struktur terenowych
Projekt TMM 1A(1), Mechatronika AGH IMIR, rok 2, sprawozdania, TMM, inne projekty, Projekt 1a
Stopnie trudnosci uprawy gleb, geodezja, rok III, Projektowanie Struktur Terenowych, Studia
więcej podobnych podstron