BIOMECHANIKA - dyscyplina naukowa zajmująca się organizmami żywymi, traktowanymi jako narzędzia o określonych funkcjach mechanicznych.
Celem biomechaniki jest zrozumienie układu ruchu ciała człowieka.
PARAMETRY MASOWE CIAŁA CZŁOWIEKA:
Obliczanie mas poszczególnych członków ciała człowieka
Wyznaczanie środków ciężkości w poszczególnych segmentach ciała
Ciężar - jest wynikiem przyciągania ziemskiego. Jednostka [N].
Jest wielkością wektorową, ponieważ posiada cztery cechy wektora:
Wzór na ciężar: P=m*g gdzie g=9,81m/s2
Masa - to ilość danej materii. Jednostka [kg]. Jest wielkością skalarną charakteryzującą ciało w sposób jednoznaczny.
Względne ciężary części ciała według Browna i Fishera z XIXw.:
Głowa - 7%
Tułów - 43%
Ramię - 3%
Przedramię - 2%
Dłoń - 1%
Udo - 12%
Podudzie - 5%
Stopa - 2%
Środek ciężkości - jest punktem przyłożenia wypadkowej siły ciężkości. Punkt, który należy podeprzeć aby ciało było w równowadze = punkt od którego we wszystkich kierunkach równoważą się siły ciężkości.
Umowne położenie środków ciężkości w poszczególnych częściach ciała:
G - siodełko tureckie kości klinowej
T - 44%
R - 47%
PR - 42%
D - w okolicy głowy trzeciej kości śródręcza
U - 44%
PU - 42%
S - 44%
Moment siły - jest to iloczyn siły i ramienia siły.
M=F*r [Nm]
r1*P1=P2*r2 by ciało było w równowadze
r - ramię siły czyli najkrótsza odległość od osi obrotu do kierunku działania siły
Bezpośrednie metody wyznaczania ŚC:
Metoda zawieszenia.
Metoda Borelliego -Zastosowanie dźwigni dwustronnej. Badanie dokonujemy w trzech płaszczyznach.
Du Bois - Reymonda - dźwigni jednostronnej. Waga tarowana po położeniu deski do 0. Stopy badanego przylegają do podpórki. Znajduje się płaszczyznę OŚC. Pomiar w trzech płaszczyznach.
Metoda graficzna - wypadkowa dwóch sił równoległych jest równa geometrycznej sumie tych sił na zwrot siły bezwzględnie większej, a jej punkt przyłożenia znajduje się na prostej łączącej punkty przyłożenia sił składowych i dzieli ten odcinek odwrotnie proporcjonalnie do wielkości sił składowych.
Rysunek stosowany przy metodzie wykreślnej:
Wzór powyższego rysunku (stosowany przy metodzie obliczeniowej):
F1*X = F2*y
Y= L -X
F1*X = F2(L-X)
F1X = F2L -F2X
F1X+ F2X= F2L
X(F1+F2) = F2L |: (F1+F2)
![]()
Metoda analityczna wyznaczania OŚC:
Wypadkowy moment siły ciężkości układu sił równoległych względem dowolnego punktu jest równy algebraicznej sumie momentów sił składowych tego punktu
Oznaczamy środki ciężkości poszczególnych segmentów ciała
Umieszczamy obraz człowieka w układzie współrzędnych
Najpierw należy wyznaczyć położenie środków ciężkości poszczególnych części ciała:
- oznaczamy środki obrotu w stawach
- łączymy liniami środki obrotu w osie obrotu
- sprawdzamy czy linie stanowią osie symetrii, jeśli nie to nanosimy poprawki
Rysujemy układ współrzędnych tak by sylwetka znalazła się w wartościach dodatnich
Mierzymy linijką współrzędne OŚC i zapisujemy na kartę obliczeń
Wyliczamy momenty sił mnożąc wartości współrzędnych przez względne ciężary
Sumujemy momenty sił oddzielnie dla X i Y; wyliczamy sumę momentów sił
Dzielimy sumę momentów sił przez siłę wypadkową celem obliczenia ramion sił (współrzędnych środka ciężkości całego ciała).
![]()
![]()
Oznaczamy na zdjęciu środek ciężkości o współrzędnych X i Y
Stopnie swobody: może być 6; jest to ruch niezależny wykonany w jednym kierunku, bez zmiany położenia w stosunku (…?).
Człon w przestrzeni określają trzy punkty ABC o 9 współrzędnych .
Ciało sztywne - odległości AB, BC, AC nie ulegają zmianie. Z 9 współrzędnych pozostaje tylko 6 niezależnych parametrów określających położenie członu w przestrzeni. Mówimy wtedy o 6 stopniach swobody:
Trzy ruchy postępowe
Trzy ruchy obrotowe
H=6-s gdzie: H - liczba stopni swobody s - więzy
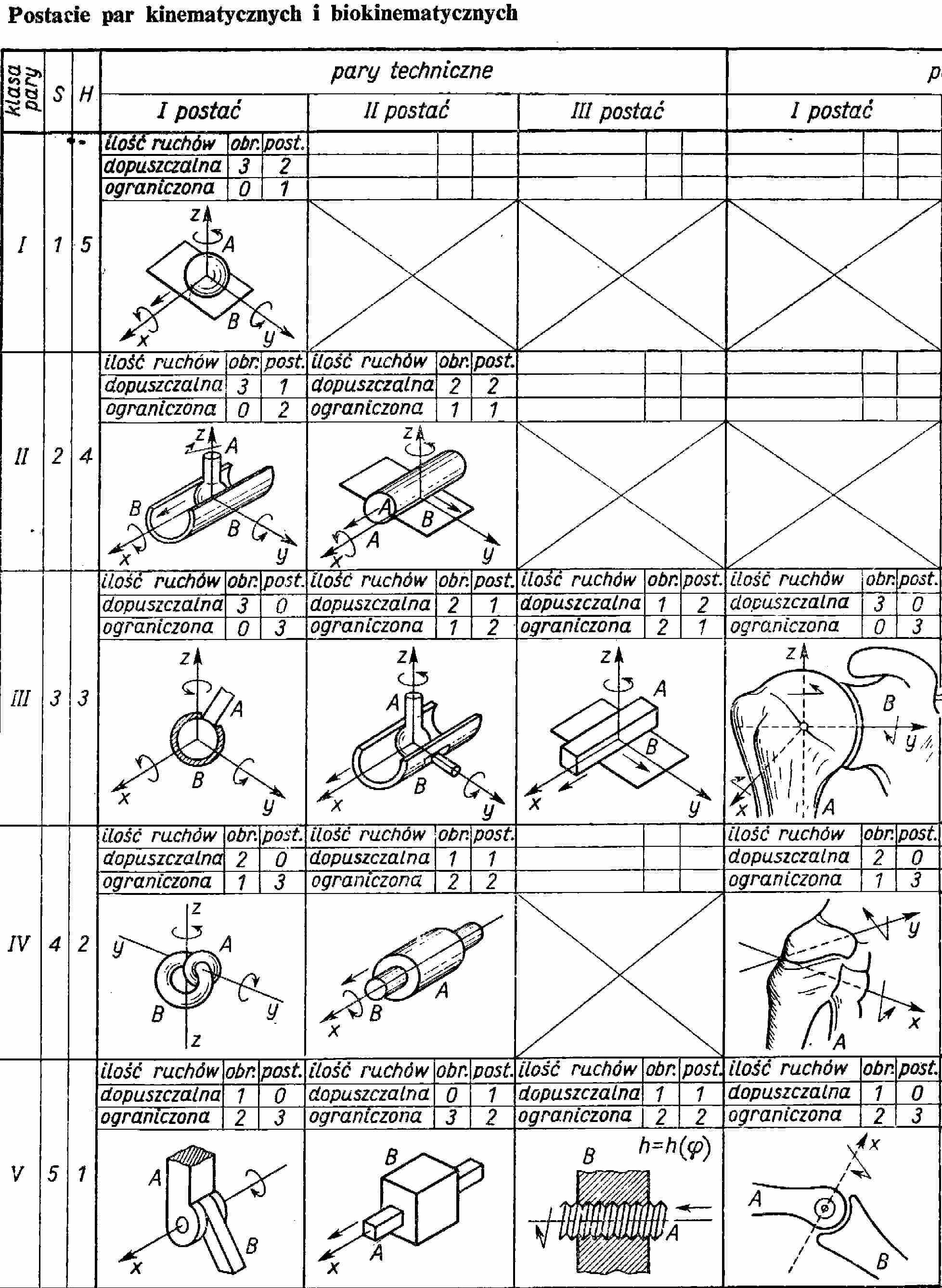
Człon - sztywny element ciała ludzkiego. Podstawowa struktura mechanizmu.
Półpara - człon przystosowany do połączenia z innymi
Para kinematyczna - ruchowe połączenie dwóch półpar swobodnych.
Łańcuch kinematyczny - spójny układ członów połączonych ruchowo
Mechanizm - podstawa (człon nieruchomy) + łańcuch biokinematyczny wykonujący określone ruchy
Biomechanizm chwilowy - ma miejsce, gdy podczas trwania zadania ruchowego zmianie ulega skład podstawy i łańcucha biokinematycznego
Klasa pary biokinematycznej - liczba odjętych stopni swobody
Ruchliwość - nazywamy nią liczbę stopni swobody członów ruchomych mechanizmu względem podstawy.
![]()
Gdzie: n - liczba członów ruchomych bez podstawy (na rysunku cztery)
Pi - liczba par kinematycznych w danej klasie (na rysunku np. dwie V)
i - klasa pary biokinematycznej (oznaczane rzymskimi od III do V)
Równowaga - rozumie się to jako stan, w którym spełnione są następujące warunki:
Suma sił pionowych = 0
-||- poziomych = 0
Suma momentów sił = 0
Rozróżnia się trzy stany równowagi:
Stała - jest to stan, gdy po wytrąceniu ciała z równowagi, ciało to po pewnym czasie powróci do położenia wyjściowego. Jeżeli ciało o masie M wychyla się wówczas zastanie ono podniesione na pewną wysokość h. Na ciało działa przyśpieszenie ziemskie g. Ciało to zdobywa energię potencjalną i powróci do położenia wyjściowego. E=mgh.
Obojętna - gdy po wytrąceniu ciała ze stanu równowagi zmieni ono swe położenie, by znaleźć się w równowadze w innym punkcie. Energia potencjalna nie ulega zmianie.
Chwiejna - środek ciężkości ciała zmienia swe położenie, jego wychylenie zaś będzie go z tego położenia oddalać, a energia potencjalna maleć.
Ciało w podporze - jest, gdy ogólny środek ciężkości ciała znajduje się powyżej punktu podparcia. Przez punkt podparcia rozumie się punkt przyłożenia wypadkowej siły nacisku na podłoże. Sile nacisku odpowiada taka sama siła co do kierunku i wielkości.
Mięśnie
Podstawowym objawem czynności mięśni jest skurcz. Skurcz mięśni w najprostszej postaci powoduje zbliżanie się jego przyczepów. Powstające w mięśniu naprężenie to siła mięśniowa FM.
Charakterystyka zależności siły mięśni od parametrów fizjologiczno-biomechanicznych:
Jednostka ruchowa - grupa włókien mięśniowych unerwianych przez jedną k. ruchową rogów przednich. Obejmuje: motoneuron, jego akson, grupę unerwianych włókien. Odpowiada na pobudzenie nerwu obwodowego skurczem całościowo - zgodnie z prawem „wszystko albo nic”.
Siła jako cecha motoryczna daje zdolność człowieka do:
- zachowania dowolnego układu ciała w przestrzeni
- nadawania przyśpieszenia
- pokonywania sił tarcia, grawitacji.
Rodzaje sprawności siłowej:
- siła statyczna
- czynność dynamiczna
- czynność eksplozywna
Moment siły - siła maksymalna czyli najlepszy rezultat z pomiaru siły, dotyczy pary lub łańcucha biokinematycznego
Siła mięśniowa zależy od budowy mięśnia (ilości jego włókien mięśniowych i ich rozmieszczenia). Najkorzystniejsza jest pierzasta budowa, bo zwiększa jego przekrój fizjologiczny, a także prędkość skurczu.
Długość mięśnia - optimum działania siły uzyskuje się przy rozciągnięciu wynoszącym 20% jego długości spoczynkowej.
Kierunek działania siły mięśnia - wypadkowa siła mięśniowa jest przyłożona w środku geometrycznym powierzchni przyczepu przy symetrycznym rozłożeniu włókien mięśniowych. Przy asymetrycznym jest przesunięta kierunku dominującej ilości włókien.
Siła mięśniowa zależy od:
- budowy mięśnia
- jego długości
- ilości kurczących się włókien mięśniowych
- prędkości ich skracania
- stanu unaczynienia mięśnia
Moment siły zależy od:
- wszystkich poprzednio wymienionych
- wielkości kąta ścięgnowo-kostnego
- odległości przyczepu i linii siły mięśnia od osi obrotu
- długości ramienia siły mięśnia
Zadanie: Obliczanie momentu siły ciężkości biołańcuchów w różnym ułożeniu w stosunku do poziomu.
MC= MR+MPr+MD
QR=3%*9,81*masa ciała
MR= QR* długość ramienia*0,47
MPr= QPr* (długość przedramienia*0,42 + długość ramienia)
MD = QD * (długość dłoni + ramienia + przedramienia)
Miernictwo momentów siły mięśniowej
W układzie par biokinematycznych pomiar sił mięśniowych sprowadza się do pomiaru momentu siły na zasadzie równoważenia momentów mięśni przez momenty oporu:
![]()
Podział pomiarów momentów sił m.
Bezpośrednie - stosowane na osobniku żywym przy pomocy dynamometrów.
Pośrednie - metody dyskretne np. fotokinematyczna i fotometryczna. Pozwalają wyliczyć wielkości minimalne MM potrzebnych do zrównoważenia czy pokonania oporów.
Subiektywne - badany samodzielnie napina maksymalnie mięśnie
Stymulacyjne - skurcz maksymalny wywołany przez drażnienie mięśnia impulsem elektrycznym.
W statyce
W dynamice
Zasady pomiarów w statyce:
Pomiar winien odbywać się w specjalnie przygotowanym stanowisku pomiarowym.
Wyłączamy stopnie swobody poprzez ustalenie siłami zewnętrznymi sąsiednich odcinków ciała.
Badany segment powinien znajdować się w pozycji pionowej w celu zniesienia momentu siły ciężkości.
Opór przyrządu pomiarowego powinien być przyłożony pod kątem prostym do badanego elementu, by najłatwiej zmierzyć odległość od osi obrotu do punktu przyłożenia siły oporu.
Prędkość wszystkich elementów biorących udział w badaniu musi być równa zeru, by wykluczyć moment bezwładności
Przed pomiarem rozgrzewka badanego.
Parametry funkcjonalne układu ruchowego
Konieczność obsługiwania każdego stopnia swobody przez co najmniej dwa mięśnie, z których każdy obsługuje pół stopnia swobody. Dotyczy to jednostronnego działania mięśnia - może on tylko ciągnąć. Liczba mięśni obsługujących dany stopień swobody jest na ogół większa, ponieważ występuje stabilizacja ruchu.
W ustrojach żywych występują pary biokinematyczne obrotowe dlatego mięśnie wywołują w stawach momenty sił względem osi obrotów tych stawów, pod którymi przebiegają. Moment siły=moment obrotowy.
Akton - mięsień lub jego część, którego włókna mięśniowe mają jednakowy lub zbliżony kierunek przebiegu tzn. względem których rozwija moment siły. Składa się z setek lub tysięcy jednostek motorycznych. Liczba pobudzonych jednostek motorycznych decyduje o wartości siłowej. Aktonem są np. wszystkie głowy czworogłowego uda.
Funkcjonalność mięśnia - suma wszystkich funkcji, które mięsień może przejawiać w działaniu na stawy czyli suma funkcji mięśni obsługujących daną parę biokinematyczną lub łańcuch biokinematyczny.
Funkcja (aktonu) mięśnia - liczba dodatnich i ujemnych składowych momentów sił jakie mięsień może rozwijać względem osi obrotów stawów w których przebiega.
Klasa mięśnia - parametr określany liczbą stawów względem których mięsień może przejawiać swoje funkcje.
Funkcja antagonistyczna aktonu - możliwość wytworzenia momentu siły o znaku przeciwnym spowodowana zmianą położenia włókien mięśniowych w stosunku do osi obrotu.
Parametry geometryczne układu ruchu
Kąt stawowy - w odniesieniu do danej osi obrotu jest to wartość kąta zawartego pomiędzy rzutami osi długich członów rzutowanych na płaszczyznę prostopadłą do osi obrotu (płaszczyzna ruchu). Inaczej - kąt jaki tworzą proste łączące środki obrotu dwu sąsiednich stawów.
Kąt działania mięśnia - kąt utworzony przez linię łączącą punkt przyczepu mięśnia z osią obrotu w stawie oraz linią styczną do ścięgna mięśnia. Zależy od kąta stawu, na który mięsień działa i od miejsca przyczepu ścięgna.
Hypomochlion - jest to wyniosłość kostna lub inny element łączno-tkankowy, który powoduje zwiększenie kąta działania mięśnia.
8
Punkt przyłożenia
Zwrot
Kierunek
Wartość
r1 r2
P1 P2
F1 F2
X y
3N 4N
L
ŚC
FW= 7N
Wyszukiwarka
Podobne podstrony:
cenmombezw, AWF Wychowanie fizyczne, Biomechanika, biomechanika
promwodz, AWF Wychowanie fizyczne, Biomechanika, biomechanika
Ciężarwłas, AWF Wychowanie fizyczne, Biomechanika, biomechanika
sciaga egzamin biomechanika, AWF Wychowanie fizyczne, Biomechanika
cięzarciala, AWF Wychowanie fizyczne, Biomechanika, biomechanika
sciaga biomechanika-EGZ, AWF Wychowanie fizyczne, Biomechanika
ruchliw, AWF Wychowanie fizyczne, Biomechanika, biomechanika
cenmombezw, AWF Wychowanie fizyczne, Biomechanika, biomechanika
ZESTAWY PYTAŃ NA EGZAMIN USTNY ZE STYLIZACJI, Dokumenty AWF Wychowanie Fizyczne
scenariusz podania chwyty pilki recznej, AWF Wychowanie fizyczne, metodyka wychowania fizycznego
sciaga biochem, Dokumenty AWF Wychowanie Fizyczne
gimnastyka-referaty, AWF Wychowanie fizyczne, studiaa, STUDIA, STUDIA, MIX
Bogdanowicz RW, AWF Wychowanie fizyczne, psychologia
Opis i analiza przypadku wychowawczego (1), Dokumenty AWF Wychowanie Fizyczne, Konspekty Wychowanie
otwarta, AWF Wychowanie fizyczne, studiaa, STUDIA, STUDIA, MIX
policzna, Dokumenty AWF Wychowanie Fizyczne, Konspekty Wychowanie Fizyczne
KULTURA FIZYCZNA W USA, AWF Wychowanie fizyczne, HKF
więcej podobnych podstron