10 kroków symulacji
Krok 1 - musimy wiedzieć, jaki problem mamy do rozwiązania, czy do jego rozwiązania konieczne jest użycie symulacji, jeśli tak, to dla jakiej części problemu.
Krok 2 - należy sformułować obiekt, zdecydować, które informacje są potrzebne, przeprowadzić wstępne obliczenia zarówno dla lepszego „wyczucia” problemu, jak i późniejszego wykorzystania w tworzonym modelu.
Krok 3 - gromadząc informacje należy mieć na uwadze, że jakość i dokładność informacji są ważniejsze niż ich ilość
Krok 4 - należy stworzyć opis symulowanego modelu, stwierdzić, które elementy i działania zostaną zasymulowane oraz które parametry zostaną użyte i co będzie mierzone
Krok 5 - korzystając z programu symulacyjnego należy utworzyć plan rozmieszczenia elementów modelu, szczegółowo opisać elementy zdefiniować przepływy oraz ustalić kolejność operacji
Krok 6 - sprawdzić, czy utworzony model odzwierciedla studiowany obecnie system, czy rezultaty są zgodne z wynikami wstępnych obliczeń, jeśli nie są, to czy jesteśmy w stanie wyjaśnić ten problem
Krok 7 - należy przeprowadzić kolejne symulacje przy zmianie niektórych parametrów systemu, porównać wyniki symulacji
Krok 8 - sformułowanie wniosków
Krok 9 - prezentacja symulowanego modelu, tzn. prosta animacja lub kompletny pokaz z animacją, ilustracjami, komentarzami i wynikami oraz obrona sformułowanych wniosków
Krok 10 - w oparciu o wnioski modyfikacja rzeczywistego obiektu studiów
rodzajów elementów
maszyna, transporter, bufor, pomocnik - pracownik obsługi, operator systemu; przenośnik, ścieżka, magazyn, zbiornik, wejście/ wyjście
3 elementy transportu
1 transporter
2 przenośnik - przyjmuje się jako transport ciągły,
3 ścieżka - jest bardzo specyficznym elementem, zdeterminowanym przez transporter i produkt
5 elementów pojęcia magazyn
1 bufor - charakteryzuje się czasowym przetrzymywaniem produktu
2 wejście/ wyjście - jest używane zawsze na początku i na końcu modelowanego systemu
3 zbiornik - domyślnie jest reprezentowany przez poziomy
4 magazyn - podobnie jak bufor , z tym że produkt można w nim ułożyć w określonym miejscu
5 przenośnik - jest kombinacją pojęć magazyn i transport
Parametry pracy
Czas - czas potrzebny na wykonanie pracy. Można wpisać stałą wartość, rozkład stochastyczny lub wyrażenie TLI.
Ustawienie na wejściu - w momencie dostarczenia produktu do elementu następuje wykonanie wyrażenia TLI.
Ustawienie na wyjściu - w momencie opuszczania elementu przez produkt następuje wykonanie wyrażenia TLI.
Partia - liczba produktów wykonywana w jednej operacji. Domyślnie ustawione jest l, co oznacza, że kiedy jeden produkt jest dostępny dla jakiegoś elementu, produkcja może się rozpocząć. Jeżeli wpiszemy 3, to produkcja nie będzie mogła się rozpocząć, zanim wszystkie trzy produkty nie będą dostarczone do elementu.
Partia wyjściowa - liczba produktów, które są odsyłane, kiedy proces produkcyjny jest zakończony, domyślnie l.
Okno dialogowe - parametry pracy, informacje dodatkowe Parametry wprowadzane w tym oknie zostały omówione P" niżej.
Nazwa procesu - do 15 znaków. Nazwa ta jest używana w danych wejściowych i w raportach Odwołują się do niej również instrukcje TLI.
Numer procesu - służy do zmiany nr procesu. Jeśli nr jest uży^ w instrukcji TLI, to użytkownik powinien go zmienić sam na zgodny ztymJał0 w tym polu. Nowy nr nie może już być używany przez inny proces.
Wartość dodana - różnica między wartością produktu po procesie i przed nim dla każdego produktu wytwarzanego w procesie. Można podać negatywną wartość (na przykład: produkt, który jest złomem czy odpadem).
Priorytet - parametr, który może być używany przy różnych marszrutach technologicznych.
Wybraki - procent produktów, jaki jest odpadem (wybrakiem) w tym procesie.
Losowy generator czasu - może być specyficzny dla danego procesu.
Losowy generator partii wejściowych (wsad, porcja) - używany dla partii wejściowych. Może być specyficzny dla indywidualnego procesu.
Losowy generator partii wyjściowych - używany dla partii wyjściowych. Może być specyficzny dla indywidualnego procesu.
Wymień programy symulacyjne
ARENA, Automation Master, AUTOMOD, CFS, COSIMIR, COSIVIS, DESA, GRAFSIM, MAST, PACE ,PICS, QUEST, Taylor II, SIMFACTORY, Visual SimNet, SIMPEXII
Co to znaczy TLI
TLI jest to wyrażenie napisane w języku programowania
T-Taylor
L- Language
I - Interface
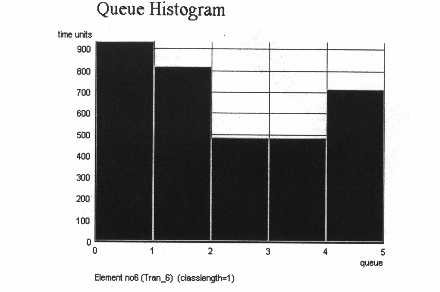
Histogram kolejki
Time units- jednostka czasu
Queue - kolejka
Histogram czasu oczekiwania
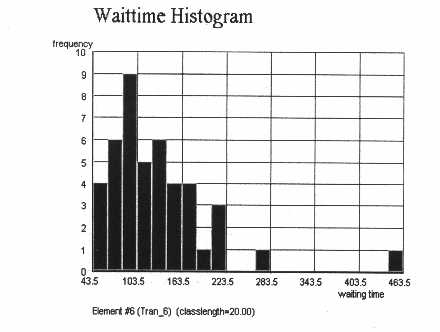
Frequency- częstotliwość
Waiting time - czas oczekiwania
Elementy danych wyjściowych
1 Dane wyjściowe - przesyłanie danych, raporty, baza danych, integracja, analiza, grafika
a. przesyłanie danych - pliki (periodyczne)- dostęp do plików;;
-trwała kopia; -interfejs do innych programów
b. raporty- standardowe; -przerobione
c. baza danych- pamięć; -wyszukiwanie; -manipulacja
d. integracja- arkusz kalkulacyjny
e. analiza- przedział ufności, czas serii, objaśnienia, optymalizacja, ruch wsteczny
f. grafika - histogram, wykres - grafika statystyczna; - - grafika dynamiczna
Wyszukiwarka
Podobne podstrony:
automatyka i robotyka 12 12 1
Pomiary Automatyka Robotyka 12 Nieznany
Maszynoznawstwo ogolne, Automatyka i Robotyka, Semestr 1, Maszynoznastwo, kolos, ściągi
Zagad NE09, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elekt
opracowanie2, Automatyka i robotyka
automat tokarski, Automatyka i Robotyka, Semestr 5, ZMiSW, kolos lab
CLAB 1 2010-2011, Automatyka i Robotyka, Język programowania
sprawozdanie automatyka2, studia, V semestr, Automatyka i robotyka, sprawko automaty stabilność
Automatyka i Robotyka KOL
automatyka i robotyka-rozwiazania, Politechnika Wrocławska - Materiały, podstawy automatyki i roboty
sc5 druk, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elektro
Automatyka i robotyka Zad 2, Inżynieria biomedyczna UTP, Automatyka
rownania nieliniowe, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczne,
I, Automatyka i Robotyka, Semestr 3, Obróbka cieplna i powierzchniowa, ściągi
więcej podobnych podstron