
Teoria Maszyn i Mechanizmów
Analiza Mechanizmu:
Synteza strukturalna i geometryczna mechanizmu
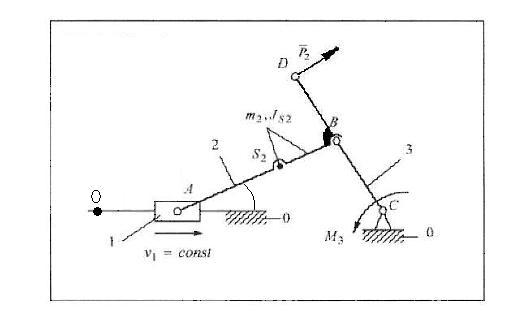
Na postawie symbolicznego zapisu struktury i parametrów łańcucha kinematycznego budujemy jego schemat ideowy:
Dodatkowo przyjmuję wymiary mojego mechanizmu:
|AB|=1[m]
|BC|=0,7[m]
|OC|=1,9559 [m]
|BD|=0,4 [m]
dodatkowo dla danego położenia początkowego przyjmuję następujące dane:
|0A|=0,6[m]
φ2=30°
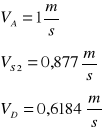
Człon napędzający posiada następującą prędkość i przyspieszenie
![]()
Ruchliwość i klasy mechanizmu:
a)ruchliwość
![]()
w- ruchliwość mechanizmu
n- liczba członów mechanizmu
i- klasa par występujących w łańcuchu kinematycznym
p4- para kinematyczna klasy czwartej
p5- para kinematyczna klasy piątej
Wyznaczenie ruchliwości analizowanego mechanizmu
n= 3
p4=0
p5=4
![]()
Ruchliwość mechanizmu w=1
b)klasy mechanizmu:
Po odłączeniu członu napędzającego 1 pozostałe człony 2 i 3 tworzą grupę strukturalną.
Grupa strukturalna analizowanego mechanizmu jest klasy II
Analiza kinematyczna mechanizmu.
Analiza kinematyczna mechanizmu metoda grafoanalityczna.
Analiza kinematyczna wykonana jest dla jednego wybranego położenia mechanizmu.
Grafoanalityczna analiza prędkości mechanizmu.
Wyznaczanie prędkości VA .
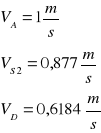
Zgodnie z przyjętą prędkością członu napędzającego, prędkość VA=1![]()
Wyznaczanie prędkości VB
W tym celu skorzystam własności dodawania trójkątów. Jak widać na rysunku, wektor prędkości ![]()
jest równoległy do odcinka |OA|, wektor prędkości ![]()
jest prostopadły do odcinka |BC|, oraz wektor prędkości ![]()
jest prostopadły do odcinka |AB|. Możemy więc zapisać równanie opisujące daną zależność na podstawie rysunku.
![]()
Wyznaczanie prędkości punktu VD
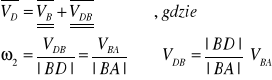
Wektor prędkości ![]()
jest prostopadły |DB|
Wyznaczanie prędkości środka masy
Przyjęcie podziałki rysunkowej dla planu prędkości:
Następnie rysuję znane wektory, dzięki czemu mogę swobodnie odczytać wartości prędkości na podstawie przecięć prostych(wektorów, przy których znany jest jedynie kierunek). Długości poszczególnych odcinków oznaczają odpowiednie wartości prędkości.
Plan prędkości (w programie AutoCAD)
Z planu prędkości odczytano następujące wartości:
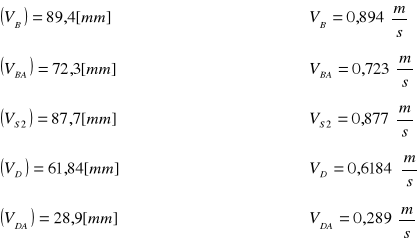
Wyznaczenie prędkości kątowej członu drugiego:
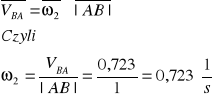
Wyznaczenie prędkości kątowej członu trzeciego:
Grafoanalityczna analiza przyśpieszeń mechanizmu.
Przyspieszenie punktu A
Przyspieszenie członu napędzającego, podobnie jak i jego prędkość zostało z góry narzucone i wynosi:
![]()
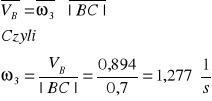
Równania przyśpieszeń mechanizmu dla poszczególnych punktów:
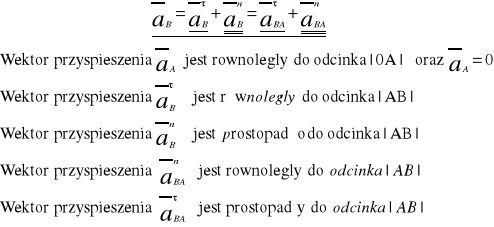
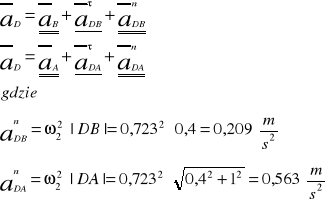
Wyznaczenie przyspieszenia pkt.D
Wyznaczenie przyspieszenia pkt. środka masy S2
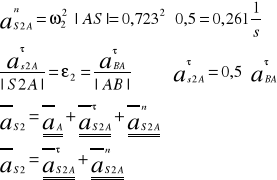
Przyjęcie podziałki rysunkowej dla planu przyśpieszeń:
![]()
Plan przyśpieszeń
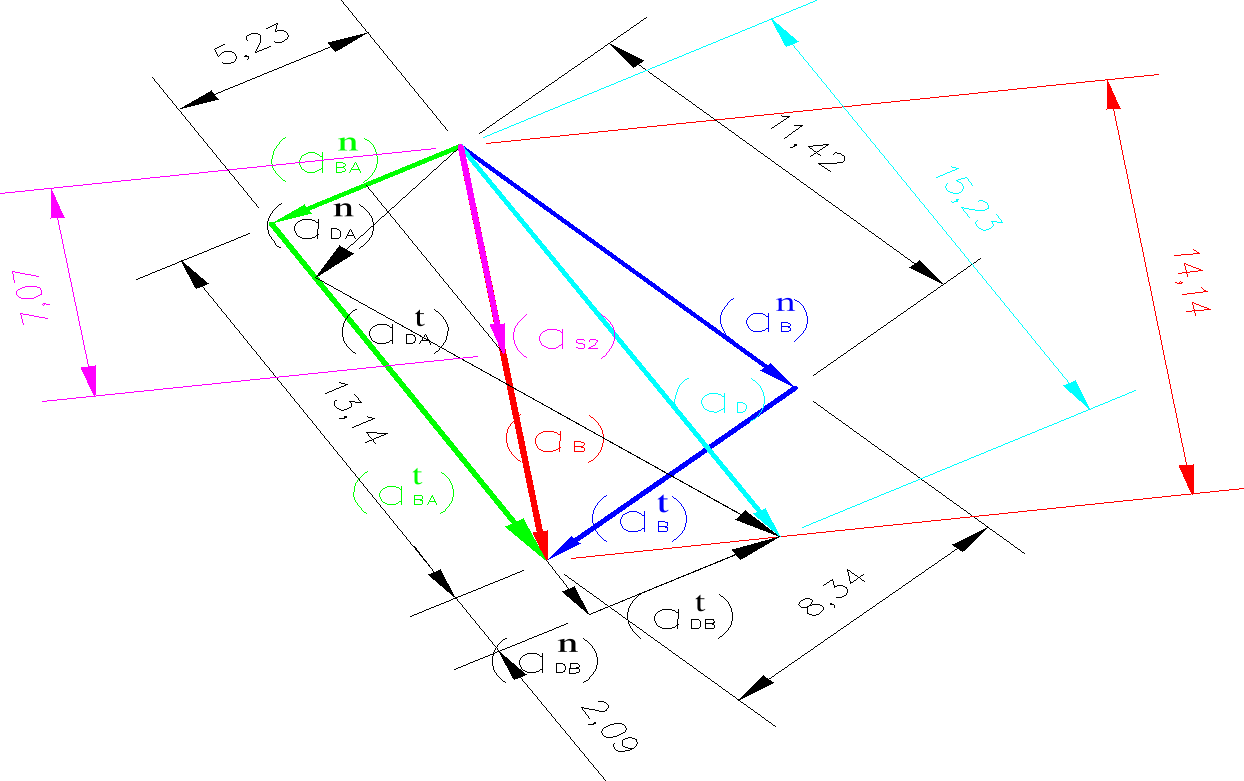
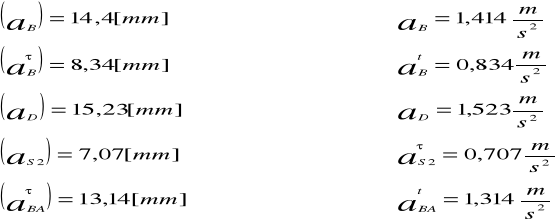
Na podstawie rysunku, analogicznie do wykresu prędkości odczytuję następujące przyspieszenia:
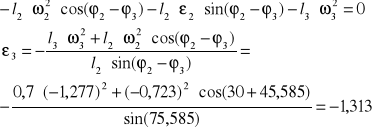
Wyznaczenie przyspieszenia kątowego członu drugiego:

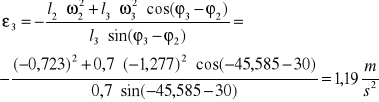
Wyznaczenie przyspieszenia kątowego członu trzeciego:

Analiza kinematyczna mechanizmu metodą analityczną
Dane:
- φx(t)=0
- φ0(t)=180
- l0(t)= 1,956 [m]
- l2(t)=1[m]
- l3(t)=0,7[m]
Dodatkowo zakładam położenie początkowe:
Mechanizm opisujemy wielobokiem wektorowym:
![]()
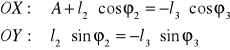
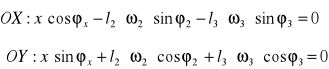
Po zrzutowaniu na osie układu mamy:

Uwzględniając fakt, iż:
Otrzymujemy:

Wprowadzając oznaczenia takie jak:
![]()
Otrzymujemy:
Porównując obydwie strony równania mamy:
Obliczając ostatecznie współczynniki mamy:
A=-1,356
C=-0,8661
Otrzymujemy
![]()
= -30°
![]()
= 45,585°
Analityczne wyznaczanie prędkości mechanizmu.
Stosując podstawowe wiadomości z fizyki, w celu obliczenia prędkości różniczkujemy drogę po czasie.
Zarówno jak i równania drogi, tak i dla prędkości zapisujemy równania dla obydwu osi:
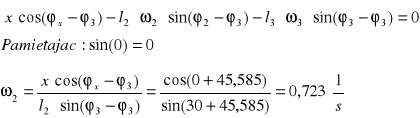
Pamiętając że:
![]()
W celu wyznaczenia prędkości ![]()
obracamy układ współrzędnych o kąt φ3 :
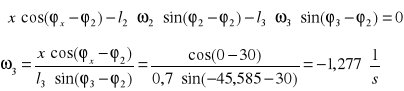
Analogicznie w celu obliczenia ![]()
przesuwamy układ współrzędnych kąt φ2 :
Analityczne wyznaczanie przyspieszeń mechanizmu.
Przyspieszenie jest pochodną prędkości po czasie, znając tą zależność możemy wyliczyć przyspieszenia:
![]()
Postępując tak samo, czyli obracając układ kąt ![]()
mamy:
![]()
Czyli:
Stosując tą samą metodę wyliczamy ![]()
:
Wykresy analityczne w programie SAM.
Ogólny schemat w programie SAM
Powyższy schemat u uwzględnieniem toru poszczególnych punktów
Wyniki prędkości przyspieszeń w programie SAM
Porównanie otrzymanych wyników z poszczególnych metod, jako sprawdzenie poprawności obliczeń:
zmienna |
metoda grafoanalityczna |
metoda analityczna |
SAM |
Prędkości |
|||
VA |
1 |
1 |
1 |
VB |
0,894 |
- |
0,894 |
VBA |
0,723 |
- |
- |
VD |
0,6184 |
- |
0,619 |
VDA |
0,289 |
- |
- |
VS2 |
0,877 |
- |
0,877 |
ω2 |
0,723 |
0,723 |
0,723 |
ω3 |
1,277 |
-1,277 |
-1,277 |
Przyspieszenia |
|||
aA |
0 |
0 |
0 |
aB |
1,414 |
- |
1,414 |
aBt |
0,834 |
- |
- |
aBN |
1,142 |
- |
- |
|
1,314 |
- |
- |
|
0,523 |
- |
- |
aD |
1,523 |
- |
1,522 |
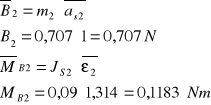
aS2 |
0,707 |
- |
0,707 |
ε2 |
1,314 |
-1,313 |
-1,314 |
ε3 |
1,19 |
1,19 |
1,19 |
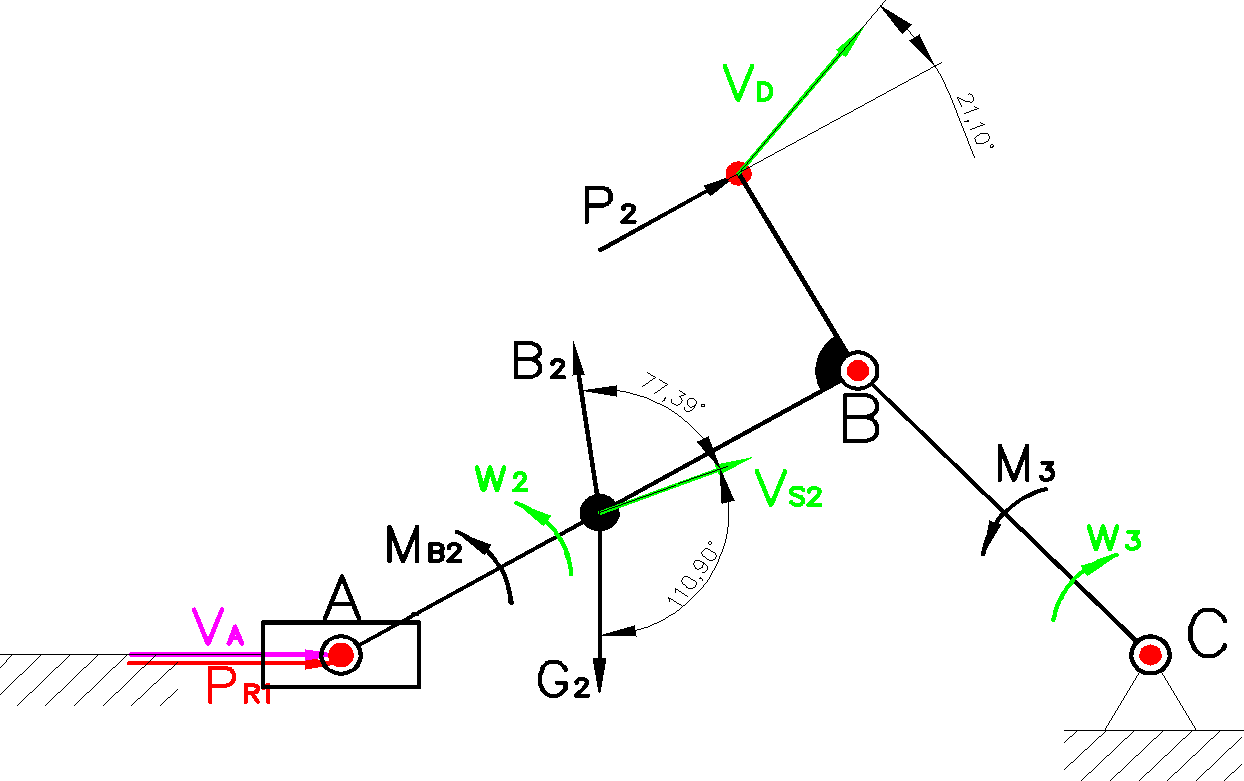
3.0 Analiza kinetostatyczna mechanizmu.
Schemat:
Zgodnie z założeniami projektu, człon 2 mechanizmu traktujemy jako masowy. Uwzględnimy wpływ siły ciężkości na obciążenie mechanizmu.
Obliczenie momentów bezwładności:
założenia projektu:
przyjmuję następujące wartości siły i momentu:
P2=20N
![]()
M3=10m
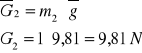
m2= 1 kg
Obliczam moment bezwładności na podstawie wzoru:
![]()
Wstawiając dane:
![]()
wyznaczenie sił bezwładności B oraz siły przyciągania G:
c) uwolnienie układu od więzów:
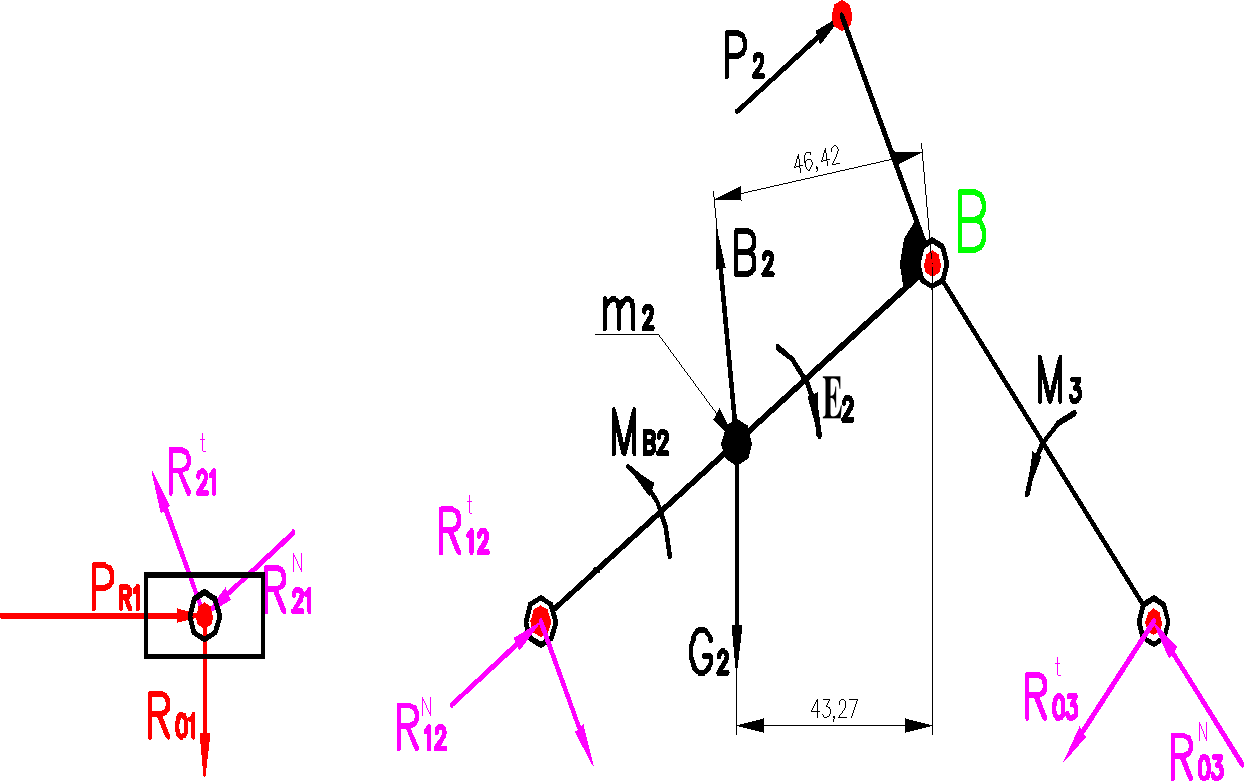
d) obliczenia sił
Ogólne równanie sił:
![]()
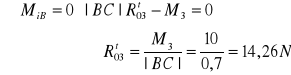
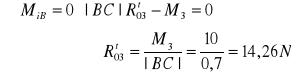
Równanie momentów dla członu trzeciego względem pnkt B
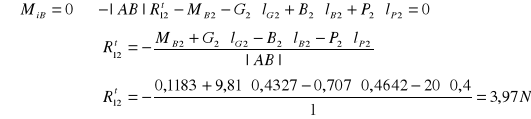
Równanie momentów dla członu drugiego względem pnkt B
Podobnie jak to miało miejsce w przypadku metody grafoanalitycznej, teraz również posłużę się programem AutoCAD do wyznaczenia poszczególnych sił.
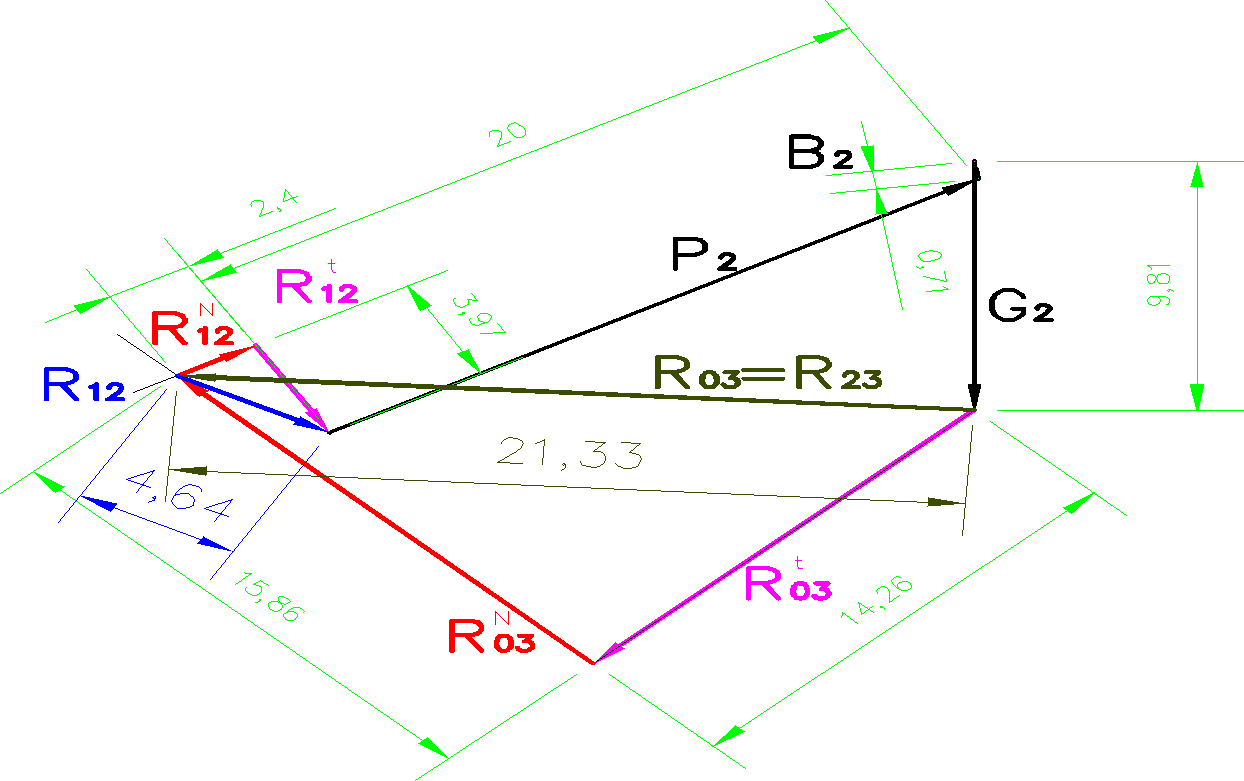

Następnie wyznaczam siły równoważącej działającej na człon napędzający:
Z planu sił odczytano:
![]()
![]()
Metoda mocy chwilowej.
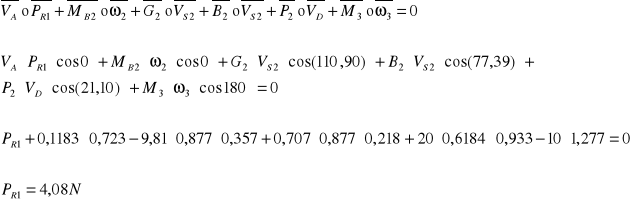
Siła równoważąca:
![]()
Podsumowanie analizy kinetostatycznej.
Rodzaj metody |
Metoda wykreślna |
Metoda mocy chwilowych |
Analiza kinetostatyczna w SAM-ie |
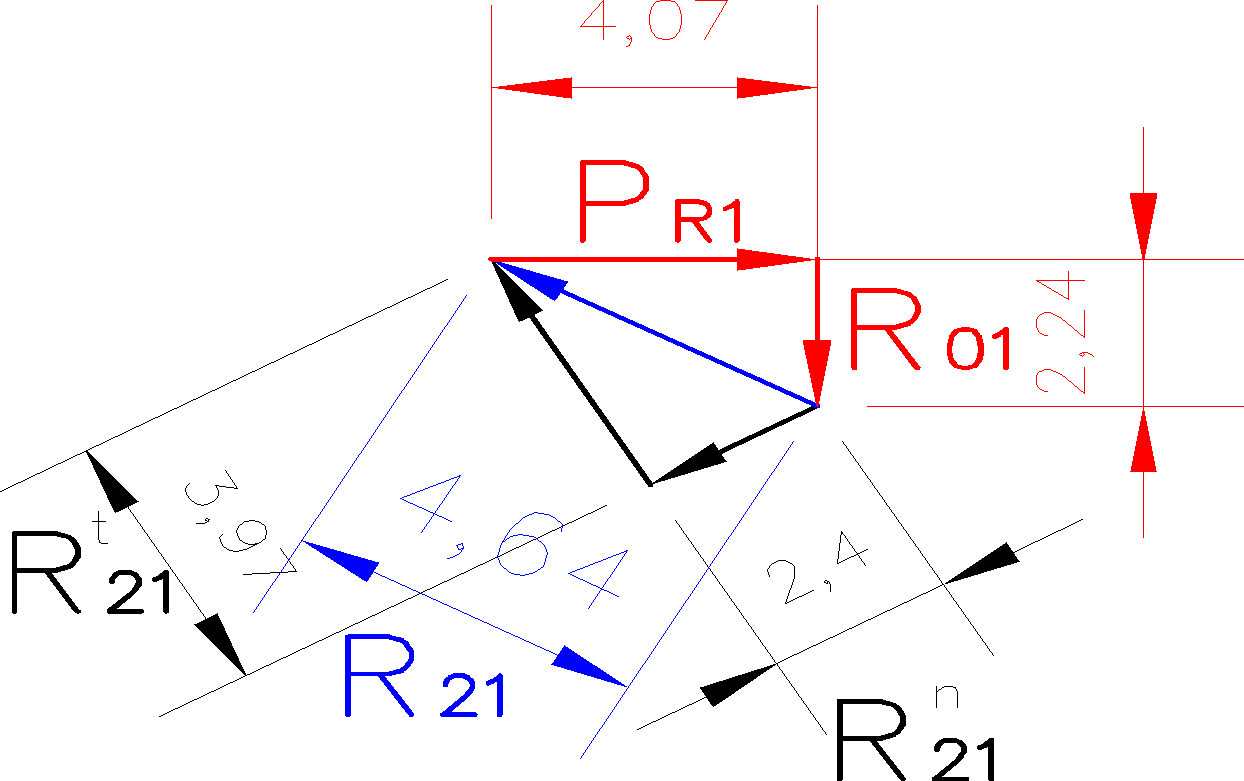
PR1 |
4,07 |
4,08 |
4,078 |
![]()
πa
PLAN SIŁ DLA CZŁONU NAPĘDZAJĄCEGO
![]()
Wyszukiwarka
Podobne podstrony:
cw26(teoria), Studia PWr W-10 MBM, Semestr II, Fizyka, Fizyka - laborki, Fizyka - laborki, Fizyka La
karta T, Studia PWr W-10 MBM, Semestr VI, Obróbka Ubytkowa, OU projekt, obróbka ubytkowa projekt
cw31(teoria), Studia PWr W-10 MBM, Semestr II, Fizyka, Fizyka - laborki, Fizyka - laborki, Fizyka La
cw21(teoria), Studia PWr W-10 MBM, Semestr II, Fizyka, Fizyka - laborki, Fizyka - laborki, Fizyka La
Karta I 2, Studia PWr W-10 MBM, Semestr VI, Obróbka Ubytkowa, OU projekt, obróbka ubytkowa projekt,
ktech-str1 - Kopia, Studia PWr W-10 MBM, Semestr VI, Obróbka Ubytkowa, OU projekt, obróbka ubytkowa
Karta I 4, Studia PWr W-10 MBM, Semestr VI, Obróbka Ubytkowa, OU projekt, obróbka ubytkowa projekt,
cw43(teoria), Studia PWr W-10 MBM, Semestr II, Fizyka, Fizyka - laborki, Fizyka - laborki, Fizyka La
Karta I 8, Studia PWr W-10 MBM, Semestr VI, Obróbka Ubytkowa, OU projekt, obróbka ubytkowa projekt,
Karta I 5, Studia PWr W-10 MBM, Semestr VI, Obróbka Ubytkowa, OU projekt, obróbka ubytkowa projekt,
ktech-str1, Studia PWr W-10 MBM, Semestr VI, Obróbka Ubytkowa, OU projekt, obróbka ubytkowa projekt,
cwiercfalowka-teoria, Studia PWr W-10 MBM, Semestr II, Fizyka, Fizyka - laborki, Fizyka - laborki, F
Karta I, Studia PWr W-10 MBM, Semestr VI, Obróbka Ubytkowa, OU projekt, obróbka ubytkowa projekt
wahadlo matematyczne- teoria, Studia PWr W-10 MBM, Semestr II, Fizyka, Fizyka - laborki, Fizyka - la
więcej podobnych podstron