KANON PRAW ROBOTYKI ASIMOWA:
1. Robot nie może ingerować w działanie człowieka, oprócz tych działań, które szkodzą człowiekowi.
2. Robot musi być posłuszny rozkazom wydawanym przez człowieka, oprócz tych rozkazów, które są sprzeczne z drugim prawem.
3. Robot musi chronić swoją egzystencję, oprócz tych przypadków, które są sprzeczne z drugim lub drugim prawem.
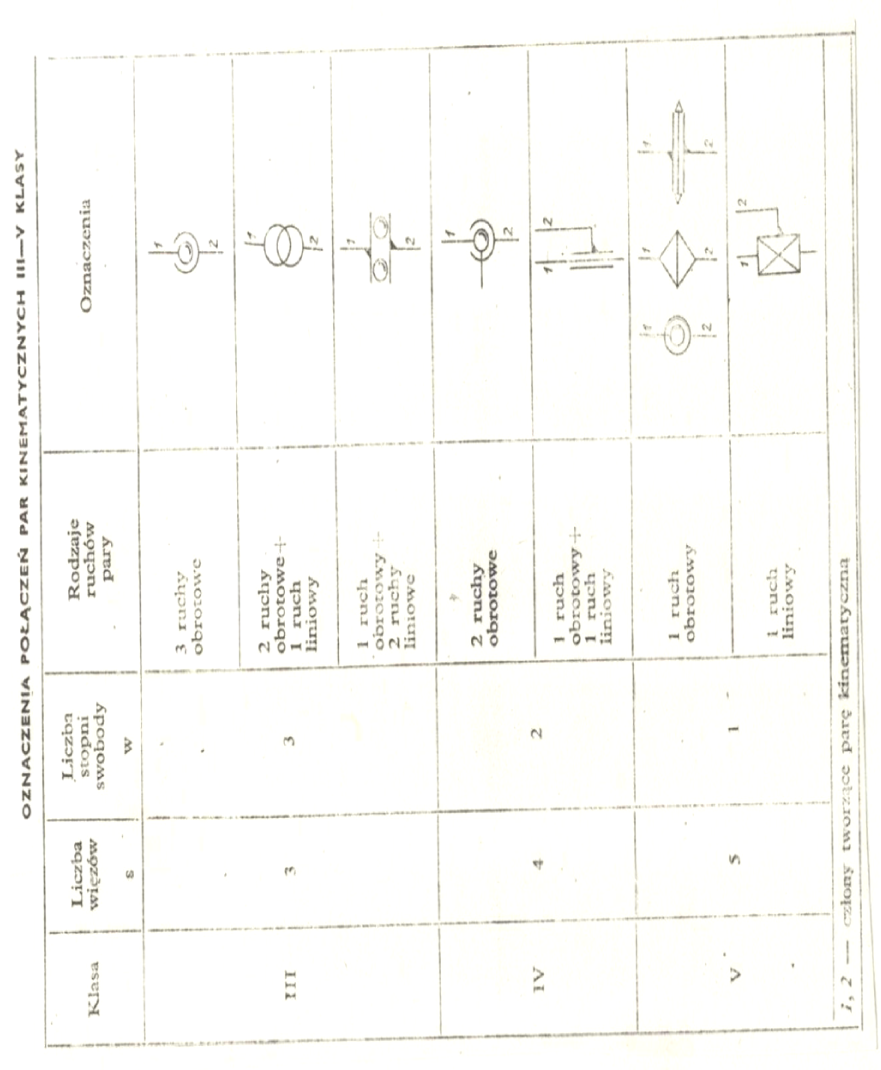
Liczba stopni swobody:
Liczba stopni ruchliwości:
Liczba stopni manewrowości:
Uwaga: w przypadku mechanizmu zbudowanego z par V klasy: r = n -1 = p5
ŚWIAT:
1502 - Goetz von Berlichingen i jego „Żelazna ręka”
1712 - Thomas Newcomen wynajduje maszynę parową
1784 - James Watt wynajduje pierwszy regulator prędkości obrotowej
1810 - Medhurst - pierwszy siłownik parowy
1861 - Sommeiler - pierwszy siłownik powietrzny; początek rezygnacji z napędu parowego
1876 - wprowadzenie silnika spalinowego
1879 - wprowadzenie pneumatycznych sieci energetycznych
1891 - wprowadzenie elektrycznych sieci energetycznych
1903-1913 - wprowadzenie podziału procesu produkcyjnego na elementarne operacje technologiczne przy zastosowaniu ruchomej taśmy produkcyjnej samochodu Ford model T
1920 - pojawienie się słowa „ROBOT” - Karel Capek "R.U.R.- Rossum's Universal Robots" - premiera w Polsce w 1922r.
1929 - Henry Piraux- „pies elektronowy”
1936 - Chaplin reżyseruje film „Modern Times”
1941 - Isaac Asimow- „The Caves of Steel”
1947 - udane próby wykorzystania serwonapędu elektrycznego w budowie teleoperatora
1948 - pierwsze zastosowania techniki tranzystorowej w elektronice
1949 - Walter Grey- „żółw cybernetyczny”
1949 - opracowanie pierwszej obrabiarki programowanej przy pomocy taśmy magnetycznej (MIT, Cambridge, Boston, USA)
1951 - „lis elektroniczny”
1954 - rozpoczęcie w USA prac badawczych nad maszynami zdolnymi
do zastąpienia pracy człowieka w przemyśle nuklearnym i poszukiwaniach
oceanograficznych; wdrożenie w USA do produkcji przemysłowej obrabiarek
numerycznie sterowanych (NC) z serwonapędem elektrohydraulicznym; opracowanie pierwszego, sterowanego programowo robota przez George'a Davola
1956 - odkupienie praw do robota Davola przez Josepha Engelbergera (studenta fizyki) i założenie przez niego firmy Unimation Inc. (Danburry, Connecticut, USA)
1961 - próba wykorzystania przez Engelbergera robota firmy Unimation do obsługi ciśnieniowej maszyny odlewniczej w zakładach General Motors (New Jersey, USA)
1962 - wdrożenie do pracy produkcyjnej robotów firmy Versatran Division of American Machine and Foundry Corporation, do obsługi dwóch pras tłoczących blachy karoserii samochodowej w zakładach Ford Motor Company (Chicago, USA)
1968 - opracowanie konkurencyjnego, w stosunku do dotychczas "ręcznego" i "punktowego" programowania robotów, programowania przez "obwiedzenie toru ruchu", koncern Trallfa (Norwegia)
1968 - pierwszy przełom w sprzedaży robotów - sprzedano(w skali całego świata) 48 sztuk robotów
1969 - początki internetu - połączono w sieć 4 komputery
1971 - pierwszy mikroprocesor 4-bitowy (Intel, USA); pierwsze zastosowanie robotów w Europie, Szwecja, roboty firmy Unimation do obługi kuźnic wałów korbowych
1974 - pierwszy robot z napędem serwohydraulicznym i sterowaniem mikroprocesorowym (robot T3 koncernu Cincinnati Milacron, USA); pierwszy robot z napędem serwoelektrycznym (z silnikami prądu stałego) i sterowaniem mikroprocesorowym (roboty IRb-6 i IRb-60 firmy ASEA, Szwecja)
1975 - pierwszy zysk ze sprzedaży robotów (firma Unimation, USA)
1978 - opracowanie nowej struktury kinematycznej typu PUMA (USA)
1979 - opracowanie nowej struktury kinematycznej typu SCARA (Japonia)
1984 - drugi przełom w sprzedaży robotów - skokowy spadek ceny większości oferowanych na rynku światowym maszyn (rzędu 25-30%)
1994 - Robodoc, Niemcy
1997 - Michio Kaku- How Science Will Revolutionize the 21st Century
1998 - Robot MITI P3, Katsutoshi Tagami, koncern Honda, Japonia
2000 - Robot Asimo Astmo, Katsutoshi Tagami, koncern Honda, Japonia
2001 - Fromherz - połączenie neuronów mózgu szczura z mikroelektronicznym układem scalonym
2001 - Zeus, Computer Motion, USA
POLSKA:
1976 - pierwsze zastosowanie robotów w procesie emaliowania wanien i zlewozmywaków, Olkuska Fabryka Naczyń Emaliowanych, roboty koncernu Trallfa (Norwegia), oprzyrządowanie emalierskie firmy De Vilbiss (Niemcy)
1976-1981- opracowanie modeli, prototypów i jednostkowa produkcja szeregu własnych opracowań (m.in.IMP Warszawa, OBR PTiKM Anin, CBKO Pruszków, ZAP Ostrów Wlkp.)
1977 - zakup licencji koncernu ASEA (Szwecja) na roboty IRb-6 i -60; w kolejnych latach kłopoty z wdrożeniem produkcji seryjnej
1978 - robotyzacja (częściowa) linii zgrzewania karoserii samochodu POLONEZ w FSO Warszawa (10 stanowisk, 15 robotów firmy Unimation, 24 % łącznej liczby zgrzein)
1980 - szczyt rozwoju robotyki „gierkowskiej”: wyprodukowano ok. 600 robotów i manipulatorów, w większości własnej konstrukcji, zastosowano ok. 370 maszyn, w większości bez żadnych efektów gospodarczych
1983 - załamanie rozwoju robotyki krajowej: nie wyprodukowano i nie zastosowano żadnego robota
1986 - pierwsze oznaki ponownego zainteresowania robotyzacją produkcji przemysłowej
1988 - 508 robotów w przemyśle
1989 - 805 robotów w przemyśle
1990 - 1253 roboty w przemyśle
1994 - ok. 2800 robotów w przemyśle
1996 - ok. 3600 robotów w przemyśle
1999 - Pierwsza operacja z teleoperatorem: kierowanie komendami głosowymi endoskopem: w klinice Andrzeja Bochenka w Katowicach, , teleoperator Computer Motion, USA
2001 - ok. 6 tys. Robotów w przemyśle
2006 - ok. 14 tys. Robotów w przemyśle
DEFINICJE:
-Robot - maszyna sterowana automatycznie za pomocą sygnałów generowanych w programowalnym układzie sterowania, programowana ręcznie lub przez nauczanie: przez doprowadzenie do wybranych punktów toru, przez obwiedzenie toru ruchu lub/i przez programowanie z komputerowym wspomaganiem, wykonująca najczęściej powtarzalny, ale mogący ulec zmianie odpowiednio do zmiany zadania lub/i stanu środowiska cykl ruchów manipulacyjnych lub/i lokomocyjnych.
-Robotyka - dziedzina nauki i techniki zajmująca się teorią, realizacją i zastosowaniami
środków i urządzeń technicznych przeznaczonych do wspomagania lub realizacji czynności energetyczno-ruchowych, sensualnych i intelektualnych człowieka.
-Robotronika - dziedzina techniki, której celem jest poprawa właściwości i funkcjonalności
maszyn manipulacyjnych przez konsekwentne i intensywne wykorzystanie komponentów elektronicznych i informatycznych w ich budowie, ograniczanie funkcji i działań mechanicznych na rzecz zintegrowanych działań sensorycznych, procesorowych i programowych(efekt synergii). Robotronika jest bezpośrednią pochodną działań i celów
mechatroniki.
-Robotyzacja - zespół działań polegający na zastępowaniu lub wspomaganiu zadań (czynności) energetyczno-ruchowych, sensualnych i intelektualnych człowieka wymaganych do realizacji przemysłowych procesów wytwarzania lub innych działań człowieka przez cybernetyczne maszyny lokomocyjno-manipulacyjne.
-Robotyzacja zadań lokomocyjnych - zespół działań polegający na zastępowaniu lub wspomaganiu czynności energetyczno-ruchowych człowieka, zwierząt lub innych zadań lokomocyjnych, także połączonych z zadaniami manipulacyjnymi, technologicznymi, sensualnymi i intelektualnymi, przez cybernetyczne maszyny lokomocyjno-manipulacyjne.
-Robotyzacja zachowań człowieka - zespół działań polegający na budowie i zastosowaniu cybernetycznych maszyn lokomocyjno-manipulacyjnych, imitujących wygląd człowieka lub wybranych części jego ciała i realizujących wybrane działania jego układu mięśniowo-szkieletowego, sensualnego i intelektualnego.
-Maszyna w sensie klasycznej definicji Franza Reuleaux (1829-1905):
"... jest to mechanizm lub zespół mechanizmów we wspólnym kadłubie, służący do przetwarzania energii lub wykonywania określonej pracy mechanicznej ..."
- Maszyna w sensie definicji (1963) Iwana Artobolewskiego (1905-1977):
"... jest to urządzenie techniczne przeznaczone do częściowego lub całkowitego zastępowania funkcji energetycznych, fizjologicznych i intelektualnych człowieka ..."
-Manipulator - maszyna sterowana automatycznie za pomocą mechanizmu napędowo-sterującego lub sygnałów generowanych w stało programowym układzie sterowania, wykonująca powtarzalny cykl ruchów manipulacyjnych.
-Robot przemysłowy - urządzenie techniczne przeznaczone do zastępowania człowieka przy wykonywaniu określonych czynności manipulacyjnych, przystosowane do realizacji różnych, łatwo zmienianych programów ruchu manipulacyjno-transportowego, użytecznego w procesie produkcyjnym.
-Geometria mechanizmów - opis i badanie stosunków i zachowań przestrzennych mechanizmów maszyn manipulacyjnych.
-Kinematyka mechanizmów - opis i badanie realizacji ruchu i zachowań ruchowych mechanizmów maszyn manipulacyjnych.
-Kinetyka mechanizmów - opis i badanie sił i momentów wywołujących ruch mechanizmów maszyn manipulacyjnych.
-Mechanizm kinematyczny- mechanizm maszyny manipulacyjnej zbudowany jest w postaci szeregowego układu połączonych ruchowo członów kinematycznych, czyli w postaci tzw. łańcucha kinematycznego.
Wyszukiwarka
Podobne podstrony:
Spawalnictwo-Wyklad, Automatyka i Robotyka, Semestr 5, Spawalnictwo, Kolos z wyk
ODLEWNICTWO, Automatyka i Robotyka, Semestr 5, Odlewnictwo, kolos wyk
Odl.-pytania ETI, Automatyka i Robotyka, Semestr 5, Odlewnictwo, kolos wyk
Odlewy3, Automatyka i Robotyka, Semestr 5, Odlewnictwo, kolos wyk
Maszynoznawstwo ogolne, Automatyka i Robotyka, Semestr 1, Maszynoznastwo, kolos, ściągi
automat tokarski, Automatyka i Robotyka, Semestr 5, ZMiSW, kolos lab
I, Automatyka i Robotyka, Semestr 3, Obróbka cieplna i powierzchniowa, ściągi
wstęp i podstawowe informacje, Automatyka i Robotyka, Semestr II, Ekologia i zarządzanie środowiskie
anal termin 2, Automatyka i Robotyka, Semestr I, Analiza, Egzamin, egzamin
porozumienie 2010, Mechatronika AGH IMIR, semestr 6, Elementy wyk. robotów 2, ARTAS.SAM.v6.0.45.Mult
Projekt manipulatora, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, A PROJEKT MANIPULA
poruszane zagadnienia na wykładzie, Automatyka i Robotyka, Semestr 3, Obróbka cieplna i powierzchnio
tsis kolos troche pytan, Automatyka i Robotyka, Semestr 4, Technologia sterowania
PKM - opracowania roznych pytan na egzamin 6, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
więcej podobnych podstron