W Y Ż S Z A S Z K O Ł A |
ZAKŁAD AUTOMATYKI OKRĘTOWEJ |
Nazwisko i imię |
|||
M O R S K A w S Z C Z E C I N I E
WYDZIAŁ MECHANICZNY |
Nr ćw.
12/14 k. |
Temat ćwiczenia
Ciągłe układy regulacji - symulacja komputerowa |
Adamczewski Krzysztof
Rok akad. 1999/2000 |
||
Data wyk. ćwicz.
|
Data odd. spr.
|
Ocena |
Podpis wykł. |
Rok stud. IV M inż. Grupa Aa |
|

Podstawowe wiadomości o regulatorach
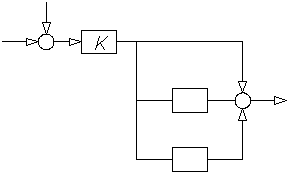
Na powyższym rysunku przedstawiony jest schemat blokowy współpracy regulatora z obiektem. Regulator zastępuje operatora, który w układzie starowania ręcznego kontrolował przebieg procesu regulowanego. Do najważniejszych zadań regulatorów należą:
porównanie wartości bieżącej (mierzonej) parametru kontrolowanego z wartością zadaną (określanie wartości odchyłki regulacji),
wytwarzanie sygnału wyjściowego o wartości zależnej od wartości odchyłki regulacji, czasu występowania odchyłki regulacji i szybkości jej zmian,
zapewnienie sygnałowi wyjściowemu postaci i mocy potrzebnej do uruchomienia urządzeń wykonawczych.
Rodzaje regulatorów:
bezpośredniego działania (nie korzystające z energii pomocniczej),
pośredniego działania (korzystające z energii pomocniczej):
elektryczne,
pneumatyczne,
hydrauliczne,
z sygnałem wyjściowym nieciągłym:
dwustawne,
impulsowe,
z sygnałem wyjściowym ciągłym:
krokowe,
trójstawne z korekcją.
Najliczniejszą, najbardziej uniwersalną grupę stanowią regulatory z sygnałem wyjściowym ciągłym. W tej grupie budowane są regulatory: elektryczne, pneumatyczne i hydrauliczne. W zależności od sposobu kształtowania sygnału wyjściowego mogą to być regulatory typu P, PI, PD bądź PID.
Dodatkowo można stwierdzić, że regulatory mogą być uniwersalne bądź specjalizowane (przeznaczone do regulacji jednej wielkości np. ciśnienia).
Regulator typu P (proporcjonalny)
Regulator tego typu charakteryzuje się następującymi cechami:
pozwala zmniejszyć wpływ zakłóceń, nie eliminuje ich jednak całkowicie,
odchyłka regulacji w układzie z tym regulatorem jest proporcjonalna do wartości zakłóceń i w przybliżeniu odwrotnie proporcjonalna do wzmocnienia regulatora,
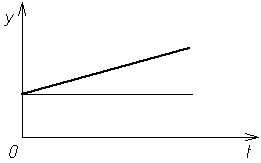
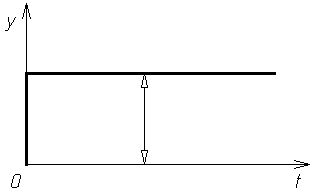
jest członem bezinercyjnym; ma więc odpowiedź skokową (przedstawioną na poniższym rysunku).
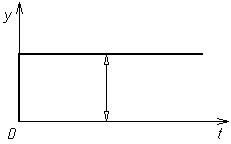
Rys. 2.1 Odpowiedź skokowa regulatora typu P.
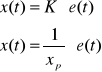
gdzie: K - wzmocnienie regulatora,
xp - zakres proporcjonalności.
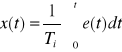
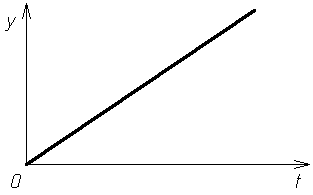
Regulator typu I (całkujący)
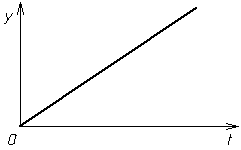
Rys. 3.1 Odpowiedź skokowa członu całkującego
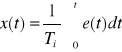
gdzie: Ti - czas całkowania,
Czym mniejsze Ti tym mniej „agresywne” działanie regulatora.
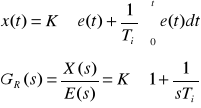
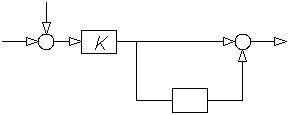
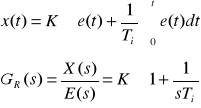
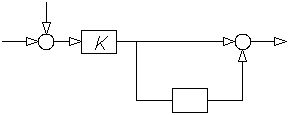
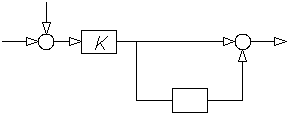
Regulator typu PI (proporcjonalno-całkujący)
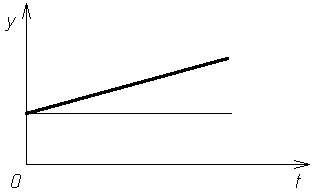
Omówione powyżej proste regulatory typu P oraz I nie zapewniają wystarczająco dobrych wyników regulacji. Regulator proporcjonalny nie zapewnia sprowadzenia do zera odchyłki regulacji, natomiast zastosowanie regulatora całkującego pozwala wprawdzie sprowadzić do zera odchyłkę regulacji w stanie ustalonym, ale wydłuża znacznie czas regulacji i łatwo prowadzi do niestabilności układu, w którym pracuje. Regulator typu PI łączy w sobie zalety regulatorów typu P oraz I, z których powstał.
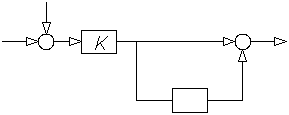
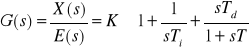
Rys. 4.1 Regulator typu PI.
Rys. 4.2 Odpowiedź skokowa
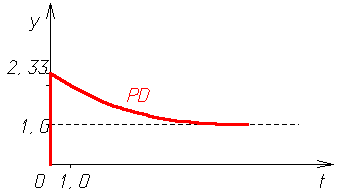
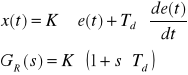
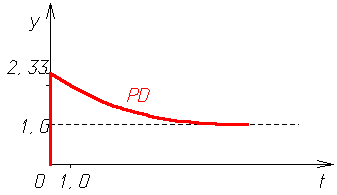
Regulatory typu PD (proporcjonalno-różniczkujący)
W rzeczywistości nie ma takich regulatorów, gdyż nie można skonstruować elementów różniczkujących idealnie. Do irealnego regulatora PD montuje się filtry dolnoprzepustowe.
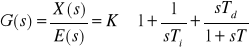
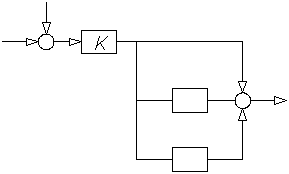
Regulatory typu PID
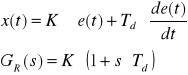
Regulator typu PID jest regulatorem najbardziej uniwersalnym, dającym najlepsze możliwości dostosowania go wymagań różnych obiektów. Powstaje on przez dołączenie do regulatora typu PI członu różniczkującego (typu D).
Człon różniczkujący wprowadzony jest w celu przyspieszenia przebiegów zachodzących w układzie regulacji. Sygnał wyjściowy członu typu D jest proporcjonalny do prędkości zmian sygnału wejściowego, natomiast nie zalezy od wartości tego sygnału. W przypadku regulatora dodanie członu D wprowadza do sygnału wyjściowego składnik zależny od prędkości zmian odchyłki. Dzięki temu do układu wprowadza się jak gdyby przewidywanie: jeżeli odchyłka regulacji narasta i jest coraz większa, regulator wytwarza sygnał przeciwdziałający temu narastaniu wcześniej niż mogłoby to być zrobione na podstawie znajomej aktualnej wartości odchyłki regulacji. Człon typu D nazywany bywa „wyprzedzającym”.
Właściwości statyczne układów regulacji
Obiekty regulacji:
statyczne,
astatyczne.
Ad. a) statyczne
Ustalony poziom sygnału.
Regulatory:
bez akcji całkujacej typu P i PD (wystąpi bład statyczny),
z akcją całkującą typu I, PI oraz PID (nie wystapi bład statyczny).
1o - e=0 bo chcemy by regulacja była dokładna
![]()
![]()
2o - bo
1o i 2o sprzeczne
Wartość sygnału rzeczywistego od wartości zadanej różni się o błąd statyczny (estat).
Jeżeli mamy obiekt statyczny należy:
użyć regulatora o własnościach całkujących,
wprowadzić nastawę punktu pracy.
Ad. b) astatyczne
Ustalona prędkość zmian sygnału.
Regulatory:
typu I - niestabilne,
typu PI oraz PID - zbędne,
typu P oraz PD - wystarczające.
W przypadku obiektów astatycznych, z całą pewnością błąd statyczny nie wystąpi.
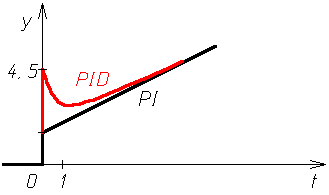
Część praktyczna - modelowanie regulatorów
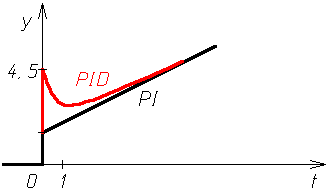
Za pomocą programu komputerowego zamodelowaliśmy regulatory PID o różnym czasie różniczkowania aby pokazać jak zmienia się przebieg oraz regulator PD.
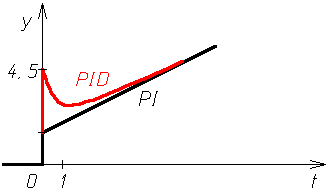
PI: PID:
K=1,5 K=1,5
Ti=3 Ti=3
Td=0,0000001 Td=2
T=1 T=1
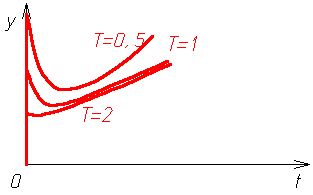
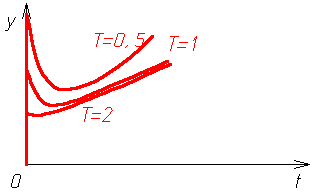
Rys. Przebiegi regulatora PID dla różnych czasów całkowania
Rys. Regulator PD gdzie: 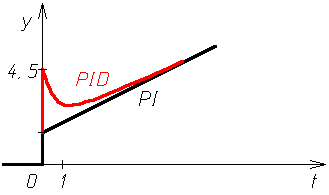
K=1,
Ti=1,
Td=2,
T=1,5
![]()
![]()
Wyszukiwarka
Podobne podstrony:
AKCELE~2, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, wsm1, FIZA, FIZAII
AOL2, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, PODSTAWY KON, Program do obliczeń
Diesel engine, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, Szkoła moje
MP, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, kwity, SEMESTR II, EPEC
A4, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, PODSTAWY KON, Program do obliczeń P
Badanie tyrystorów, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA
Praca Piotra, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola1, III
Zabezpieczenia, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA
BADANI~4, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA, ELEKTRA
SWIAT~42, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola1, III, AUTO
Łopatki, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, AM2, Siłownie, Maszyny przepły
tab lam, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, PODSTAWY KON, Program do oblic
ciasne22, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, PODSTAWY KON, Projekt, Pkm
POMIA~68, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola1, III, TECH REM
Montaz ukladu tlokowo korbowego, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, wsm1,
ELEKTRA-EGZAM, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELEKTRA
Silnik asyn. pierścieniowy, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola, ELE
Stefanowski- Układ zdalnego sterowania i zabezpieczeń, Akademia Morska -materiały mechaniczne, szkoł
więcej podobnych podstron