Sprawozdanie z podstaw automatyki.
Ćwiczenie nr 2:
Opis matematyczny, modelowanie i charakterystyki układów dynamicznych
Politechnika Śląska
Wydz. Elektryczny
Mechatronika
sekcja 9:
Pytlik Mateusz
Trela Klaudiusz
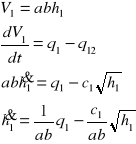
Pierwszą częścią ćwiczenia jest wyprowadzenie równań modelu uwzględniających nieliniowości związane z kształtem zbiorników oraz burzliwym charakterem przepływów.
Dla pierwszego zbiornika:
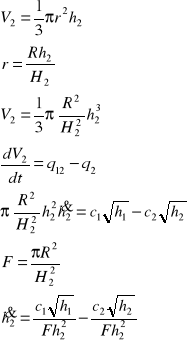
Dla drugiego zbiornika:
Tworzymy model układu w Simulinku i wprowadzamy dane do Matlaba:
a = 0.45;
b = 0.4;
H1 = 0.5;
c1 = 0.08;
R = 0.35;
H2 = 1;
c2 = 0.065;
F = pi*R*R/(H2*H2);
B = 1/(a*b);
A = c1/(a*b);
D = c1/F;
C = c2/F;
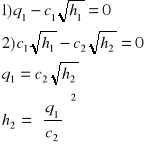
Następnie wyprowadzamy analityczną postać charakterystyki statycznej modelu nieliniowego oraz zlinearyzowanego.
Model nieliniowy:
Model zlinearyzowany:

Wybieramy dwa punkty pracy:
h20a = 0.2;
h20b = 0.7;
q10a = c2*sqrt(h20a);
q10b = c2*sqrt(h20b);
h10a = (q10a/c1)^2;
h10b = (q10b/c1)^2;
Przedstawiamy wszystkie trzy przebiegi na wspólnym wykresie.
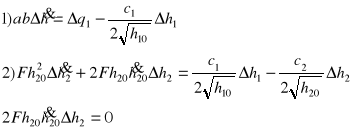
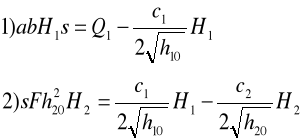
Linearyzacja:
Po zastosowaniu transformaty Laplace'a:
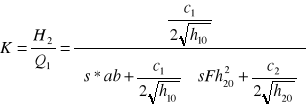
Po podstawieniu za H1 i przekształceniu otrzymujemy transmitancję:
Porównanie odpowiedzi skokowej modelu nieliniowego i transmitancji:
(wartości procentowe mówią jak zmieniło się wymuszenie)
dla punktu pracy q10=0.0544 h20=0.7:
dla punktu pracy q10=0.0291 h20=0.2:
Model nieliniowy najlepiej odwzorowuje rzeczywisty przepływ cieczy
w zbiornikach. Transmitancja jest tym bliższa rzeczywistym przebiegom im mniejsze jest odchylenie od punktu pracy. Wynika stąd, że opis za pomocą transmitancji jest słuszny tylko dla niewielkich odchyleń. Charakterystyka statyczna pokazuje zależność wartości na wyjściu od wymuszenia w stanie ustalonym. Za jej pomocą można wyznaczyć punkt pracy.
Wyszukiwarka
Podobne podstrony:
Zagad NE09, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elekt
zaliczenie - pytania i odp2, Politechnika Lubelska Wydział Mechaniczny, Semestr II, Podstawy Elektro
sc5 druk, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elektro
SC3, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elektrotechn
elektronika-8, Laboratorium Podstaw Elektroniki Politechniki Lubelskiej
Elektronika 5 protokół, Laboratorium Podstaw Elektroniki Politechniki Lubelskiej
Podstawy elektroniki - informatyka - program - gablota, Politechnika Lubelska, Studia, Studia, sem V
Badanie układów o promieniowym rozkładzie natężenia pola magnetycznego, GRONEK9, Laboratorium Podsta
Badanie układów o promieniowym rozkładzie natężenia pola magnetycznego, GRONEK9, Laboratorium Podsta
Lab. Z I PTŚ, Politechnika Poznańska, Elektrotechnika, Semestr IV, semestr 4, Podstawy techniki swie
Elektrotechnika 1 kolokwium, Politechnika Wrocławska Energetyka, 3 semestr, Podstawy elektrotechniki
Eegzamin zagadnienia cz1, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro,
sciaga elektra, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy e
tresc zadan, Politechnika Wrocławska, PWR - W10- Automatyka i Robotyka, Sem3, Elektro, Podstawy elek
02'' 2, Laboratorium Podstaw Elektroniki Politechniki Lubelskiej
L4EL 5C, Laboratorium Podstaw Elektroniki Politechniki Lubelskiej
więcej podobnych podstron