Politechnika Świętokrzyska w Kielcach |
||||
Laboratorium maszyn elektrycznych specjalnych |
||||
Ćwiczenie nr
7
|
Temat: Transformator położenia kątowego.
|
Zespół:
|
||
Data wykonania ćwiczenia:
10.12.2012r. |
Data oddania sprawozdania:
14,01,2013r. |
Ocena: |
||
1) Cel ćwiczenia:
Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz warunkami pracy transformatora położenia kątowego.
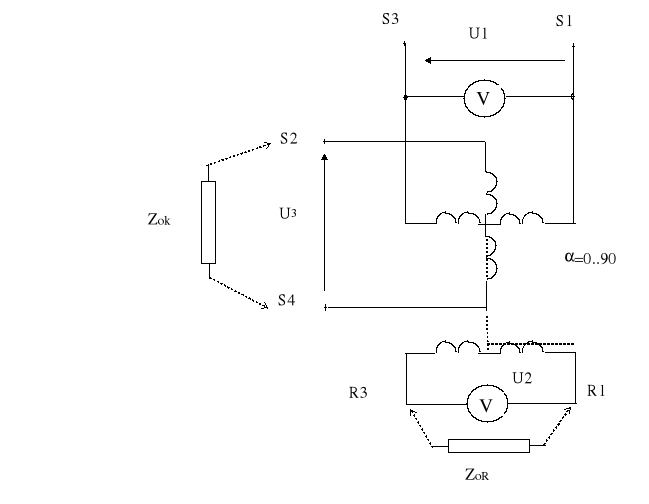
2) Schemat pomiarowy:
3)Tabele pomiarowe i wyznaczone charakterystyk:
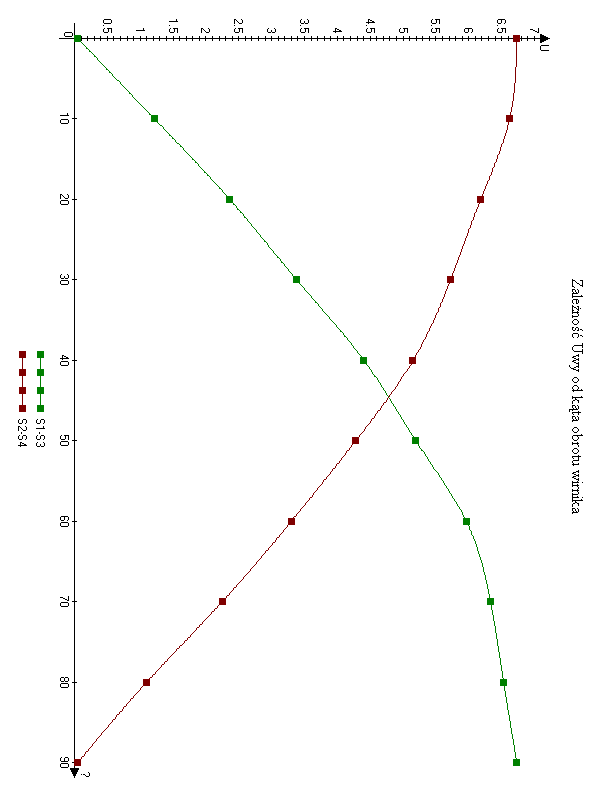
- Pomiar zależności Uwy=f(α)
Lp |
α |
US1-S3 |
US2-S4 |
UR1-R3 |
1 |
0 |
0,5 |
6,73 |
4,99 |
2 |
10 |
1,215 |
6,62 |
4,99 |
3 |
20 |
2,36 |
6,18 |
4,92 |
4 |
30 |
3,38 |
5,72 |
5,0 |
5 |
40 |
4,4 |
5,15 |
5,0 |
6 |
50 |
5,19 |
4,28 |
5,0 |
7 |
60 |
5,96 |
3,3 |
5,0 |
8 |
70 |
6,33 |
2,25 |
5,0 |
9 |
80 |
6,53 |
1,1 |
5,0 |
10 |
90 |
6,73 |
0,5 |
5,0 |
- Pomiar przekładni
Lp. |
US1-S3 |
UR1-R3 |
υ |
US2-S4 |
UR1-R3 |
υ |
|
V |
V |
- |
V |
V |
- |
1 |
0,5 |
4,99 |
9,8 |
6,73 |
4,99 |
0,74 |
2 |
1,215 |
4,99 |
4,1 |
6,62 |
4,99 |
0,75 |
3 |
2,36 |
4,92 |
2,1 |
6,18 |
4,92 |
0,79 |
4 |
3,38 |
5,0 |
1,48 |
5,72 |
5,0 |
0,87 |
5 |
4,4 |
5,0 |
1,14 |
5,15 |
5,0 |
0,97 |
6 |
5,19 |
5,0 |
0,96 |
4,28 |
5,0 |
1,17 |
7 |
5,96 |
5,0 |
0,84 |
3,3 |
5,0 |
1,51 |
8 |
6,33 |
5,0 |
0,79 |
2,25 |
5,0 |
2,22 |
9 |
6,53 |
5,0 |
0,77 |
1,1 |
5,0 |
4,55 |
10 |
6,73 |
5,0 |
0,74 |
0,5 |
5,0 |
10 |
|
υśr = 2,272 |
υśr = 2,357 |
||||
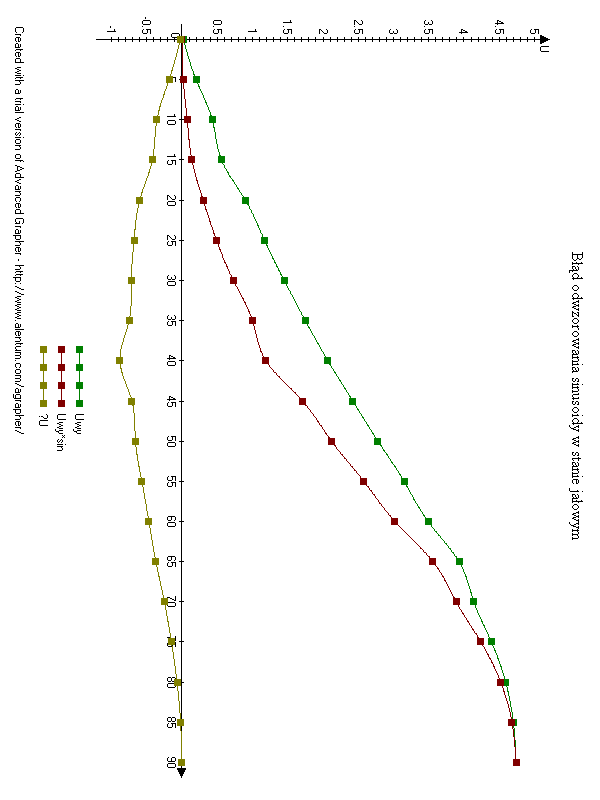
- Pomiar błędu odwzorowania sinusoidy
a) Stan jałowy
Lp. |
α |
Uwy |
Uwysinα |
ΔU |
ΔU% |
Δα |
|
- |
V |
V |
V |
% |
- |
1 |
0 |
0,022 |
0 |
-0,022 |
0 |
0,76 |
2 |
5 |
0,20 |
0,017 |
-0,183 |
-8,5 |
6,32 |
3 |
10 |
0,43 |
0,074 |
-0,356 |
-17,2 |
12,43 |
4 |
15 |
0,56 |
0,14 |
-0,42 |
-25 |
14,96 |
5 |
20 |
0,90 |
0,30 |
-0,6 |
-33,4 |
21,96 |
6 |
25 |
1,17 |
0,49 |
-0,68 |
-41,9 |
25,81 |
7 |
30 |
1,45 |
0,73 |
-0,72 |
-50,3 |
28,6 |
8 |
35 |
1,75 |
1,0 |
-0,75 |
-57,2 |
31,49 |
9 |
40 |
2,07 |
1,19 |
-0,88 |
-57,5 |
39,51 |
10 |
45 |
2,42 |
1,71 |
-0,71 |
-70,7 |
34,54 |
11 |
50 |
2,78 |
2,12 |
-0,66 |
-76,3 |
35,32 |
12 |
55 |
3,15 |
2,58 |
-0,57 |
-81,9 |
34,19 |
13 |
60 |
3,49 |
3,02 |
-0,47 |
-86,6 |
32,34 |
14 |
65 |
3,93 |
3,56 |
-0,37 |
-90,6 |
30,06 |
15 |
70 |
4,14 |
3,89 |
-0,25 |
-94 |
25,14 |
16 |
75 |
4,39 |
4,24 |
-0,15 |
-96,6 |
19,94 |
17 |
80 |
4,59 |
4,52 |
-0,07 |
-98,5 |
13,87 |
18 |
85 |
4,70 |
4,68 |
-0,02 |
-99,6 |
7,89 |
19 |
90 |
4,74 |
4,74 |
0 |
-100 |
0 |
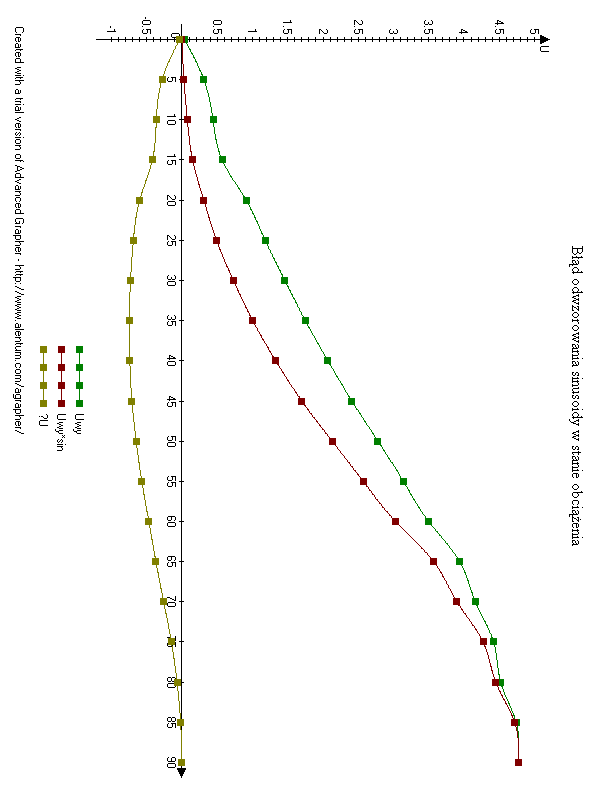
b) Stan obciążenia
ZOR= 4,7 kΩ
ZOK= 3,9 kΩ
Lp. |
α |
Uwy |
Uwysinα |
ΔU |
ΔU% |
Δα |
|
- |
V |
V |
V |
% |
- |
1 |
0 |
0,034 |
0 |
-0,034 |
0 |
1,16 |
2 |
5 |
0,31 |
0,027 |
-0,283 |
-8,7 |
9,77 |
3 |
10 |
0,44 |
0,076 |
-0,364 |
-17,3 |
12,71 |
4 |
15 |
0,57 |
0,15 |
-0,42 |
-26,3 |
14,96 |
5 |
20 |
0,91 |
0,31 |
-0,6 |
-34,1 |
21,96 |
6 |
25 |
1,18 |
0,49 |
-0,69 |
-41,5 |
26,19 |
7 |
30 |
1,46 |
0,73 |
-0,73 |
-50 |
28,99 |
8 |
35 |
1,75 |
1,003 |
-0,747 |
-57,3 |
31,37 |
9 |
40 |
2,07 |
1,33 |
-0,74 |
-64,3 |
33,23 |
10 |
45 |
2,41 |
1,70 |
-0,71 |
-70,6 |
35,54 |
11 |
50 |
2,78 |
2,13 |
-0,65 |
-76,6 |
34,79 |
12 |
55 |
3,14 |
2,57 |
-0,57 |
-77,7 |
34,19 |
13 |
60 |
3,50 |
3,03 |
-0,47 |
-86,6 |
32,34 |
14 |
65 |
3,94 |
3,57 |
-0,37 |
-90,6 |
30,12 |
15 |
70 |
4,16 |
3,90 |
-0,26 |
-93,7 |
26,15 |
16 |
75 |
4,42 |
4,27 |
-0,15 |
-96,6 |
19,34 |
17 |
80 |
4,52 |
4,45 |
-0,07 |
-98,5 |
13,87 |
18 |
85 |
4,74 |
4,72 |
-0,02 |
-99,6 |
7,89 |
19 |
90 |
4,77 |
4,77 |
0 |
-100 |
0 |
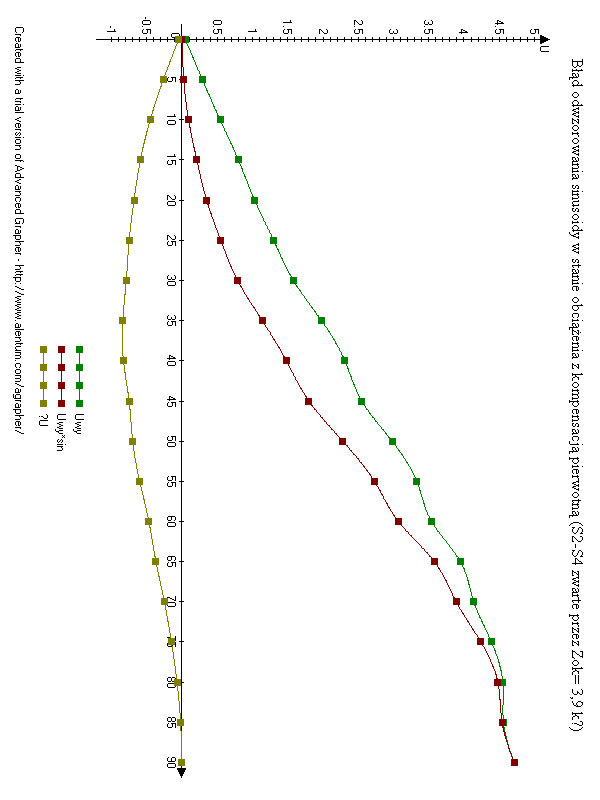
c) Stan obciążenia z kompensacją pierwotna
S2-S4 zwarte przez Zok= 3,9 kΩ
Lp. |
α |
Uwy |
Uwysinα |
ΔU |
ΔU% |
Δα |
|
- |
V |
V |
V |
% |
- |
1 |
0 |
0,046 |
0 |
-0,046 |
0 |
1,6 |
2 |
5 |
0,29 |
0,025 |
-0,265 |
-8,6 |
9,2 |
3 |
10 |
0,54 |
0,094 |
-0,45 |
-16,7 |
15,7 |
4 |
15 |
0,80 |
0,21 |
-0,59 |
-26,2 |
21 |
5 |
20 |
1,03 |
0,35 |
-0,68 |
-34 |
24,9 |
6 |
25 |
1,30 |
0,55 |
-0,75 |
-42,3 |
28,5 |
7 |
30 |
1,58 |
0,79 |
-0,79 |
-50 |
31,4 |
8 |
35 |
1,98 |
1,14 |
-0,84 |
-57,6 |
35,3 |
9 |
40 |
2,31 |
1,48 |
-0,83 |
-64,1 |
37,3 |
10 |
45 |
2,55 |
1,80 |
-0,75 |
-70,6 |
36,5 |
11 |
50 |
2,98 |
2,28 |
-0,70 |
-76,5 |
37,5 |
12 |
55 |
3,33 |
2,73 |
-0,60 |
-82 |
36 |
13 |
60 |
3,54 |
3,07 |
-0,47 |
-86,7 |
32,3 |
14 |
65 |
3,95 |
3,58 |
-0,37 |
-90,6 |
30,1 |
15 |
70 |
4,14 |
3,89 |
-0,25 |
-94 |
25,1 |
16 |
75 |
4,39 |
4,24 |
-0,15 |
-96,6 |
19,9 |
17 |
80 |
4,55 |
4,48 |
-0,07 |
-98,5 |
13,9 |
18 |
85 |
4,56 |
4,54 |
-0,02 |
-99,6 |
7,9 |
19 |
90 |
4,71 |
4,71 |
0 |
-100 |
0 |
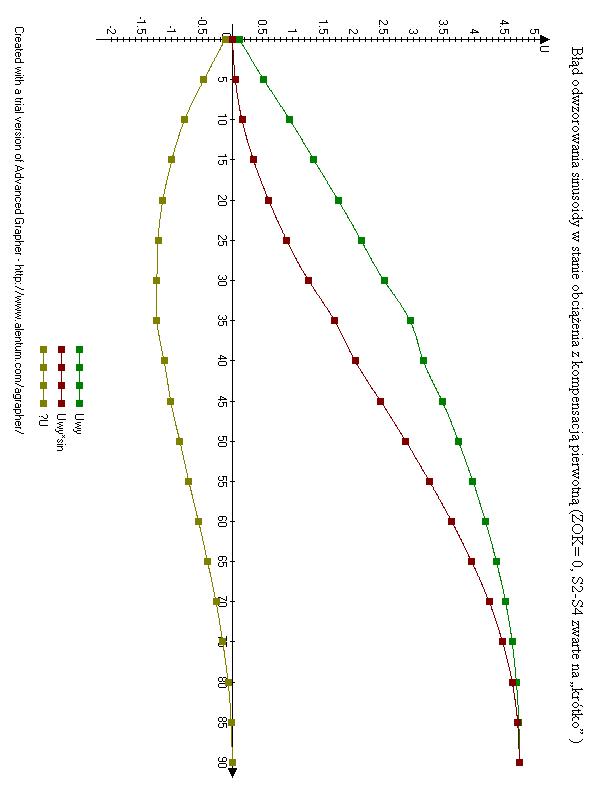
d) Stan obciążenia z kompensacją pierwotną
ZOK= 0
S2-S4 zwarte na „krótko”
Lp. |
α |
Uwy |
Uwysinα |
ΔU |
ΔU% |
Δα |
|
- |
V |
V |
V |
% |
- |
1 |
0 |
0,12 |
0 |
-0,12 |
0 |
4,13 |
2 |
5 |
0,52 |
0,05 |
-0,47 |
-9,6 |
16,2 |
3 |
10 |
0,95 |
0,16 |
-0,79 |
-16,8 |
27,6 |
4 |
15 |
1,35 |
0,35 |
-1 |
-25,9 |
35,6 |
5 |
20 |
1,75 |
0,60 |
-1,15 |
-34,3 |
42,1 |
6 |
25 |
2,13 |
0,90 |
-1,23 |
-42,3 |
46,7 |
7 |
30 |
2,51 |
1,26 |
-1,25 |
-50,2 |
49,7 |
8 |
35 |
2,94 |
1,69 |
-1,25 |
-57,7 |
52,5 |
9 |
40 |
3,16 |
2,03 |
-1,13 |
-64,3 |
50,7 |
10 |
45 |
3,47 |
2,45 |
-1,02 |
-70,4 |
49,6 |
11 |
50 |
3,74 |
2,87 |
-0,87 |
-76,3 |
46,6 |
12 |
55 |
3,98 |
3,26 |
-0,72 |
-81,9 |
43,2 |
13 |
60 |
4,19 |
3,63 |
-0,56 |
-86,6 |
38,5 |
14 |
65 |
4,37 |
3,96 |
-0,41 |
-90,6 |
33,4 |
15 |
70 |
4,52 |
4,25 |
-0,27 |
-94 |
27,2 |
16 |
75 |
4,63 |
4,47 |
-0,16 |
-96,5 |
21,3 |
17 |
80 |
4,70 |
4,63 |
-0,07 |
-98,5 |
13,9 |
18 |
85 |
4,74 |
4,72 |
-0,02 |
-99,6 |
7,9 |
19 |
90 |
4,75 |
4,75 |
0 |
-100 |
0 |
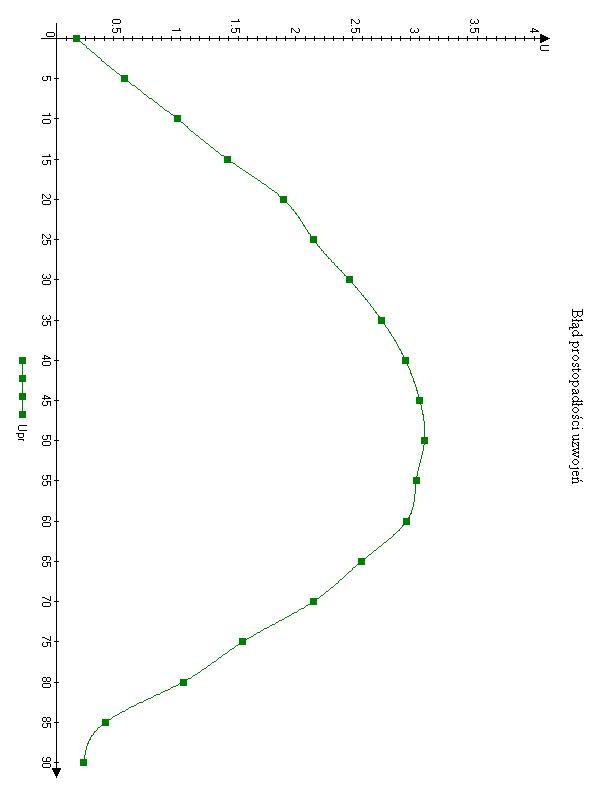
4. Wyznaczanie błędu prostopadłości uzwojeń
Lp. |
α |
U1 |
Upr |
|
- |
V |
V |
1 |
0 |
10 |
0,17 |
2 |
5 |
10 |
0,57 |
3 |
10 |
10 |
1,01 |
4 |
15 |
10 |
1,43 |
5 |
20 |
10 |
1,90 |
6 |
25 |
10 |
2,15 |
7 |
30 |
10 |
2,45 |
8 |
35 |
10 |
2,72 |
9 |
40 |
10 |
2,92 |
10 |
45 |
10 |
3,04 |
11 |
50 |
10 |
3,08 |
12 |
55 |
10 |
3,01 |
13 |
60 |
10 |
2,93 |
14 |
65 |
10 |
2,55 |
15 |
70 |
10 |
2,15 |
16 |
75 |
10 |
1,56 |
17 |
80 |
10 |
1,06 |
18 |
85 |
10 |
0,41 |
19 |
90 |
10 |
0,23 |
Uprmax= 3,08 V
ΔUpr%=(Uprmax/U1)*100%=30,8 %
4)Wnioski:
Transformator położenia kątowego jest urządzeniem, w którym napięcie wyjściowe (odpowiedź) jest pewną funkcją kąta obrotu rotora. W zależności od rodzaju tej funkcji może być transformator położenia kątowego sinusowy, cosinusowy, sinusowo-cosinusowy, liniowy itp. Nasze ćwiczenie umożliwiło poznanie badanego transformatora oraz wyznaczenie jego poszczególnych charakterystyk i parametrów.
Przy pomiarze przekładni, do stojana S1-S3 doprowadziliśmy napięcie U1 z generatora sinusoidalnego. Wirnik resolwera ustawiliśmy w takim położeniu, że osie magnetyczne uzwojenia stojana S1-S3 oraz wirnika pokryły się (α=90o )
Napięcie wyjściowe U2 osiągnęło wówczas wartość maksymalną U2=U2max=6,73V.
Z otrzymanych wyników wyznaczyliśmy wypadkową przekładnię resolwera, która wyniosła υ= 0,272 .
Przy pomiarach zależności napięcia wyjściowego od kąta obrotu wirnika uzwojenie R1-R3 wirnika zasililiśmy napięciem 5 V z generatora sinusoidalnego. Pomiary napięć stojana US1-S3 i US2-S4 wykonywaliśmy obracając wirnik co 10o w przedziale kąta od 0 do 90 o .Wyniki pomiarów zestawiliśmy w tabeli. Na ich podstawie sporządziliśmy poszczególne wykresy. Jak widać charakterystyka US1-S3= f(α) przypomina fragment sinusoidy od 0 do 90 o co jest zgodne z teoretyczną charakterystyką U=f(α) transformatora położenia kątowego. Napięcia stojana US1-S3 i US2-S4 , jak widać z wykresu przesunięte są między sobą o 90 o .
Pomiary błędu odwzorowania sinusoidy przeprowadziliśmy dla trzech stanów pracy resolwera:
w stanie jałowym- uzwojenie wirnika oraz uzwojenie stojana rozwarte
b) w stanie obciążenia- uzwojenie wirnika jest obciążone impedancją ZoR=4,7kΩ, natomiast uzwojenie kompensacyjne rozwarte
c) w stanie obciążenia- przy zastosowaniu kompensacji pierwotnej (uzwojenie stojana zwarte przez impedancję Zok=4,7kΩ )
Pomiary napięcia wyjściowego wykonywaliśmy przy obracaniu wirnika co 5o w zakresie 0÷90o . W przypadku b) zauważyliśmy, iż obciążenie uzwojenia wirnika impedancją ZoR=4,7kΩ spowodowało spadek napięcia Uwy w stosunku do przypadku a) średnio o około 0,2V . Wyniki otrzymane w punkcie c) są natomiast zbliżone do wyników z przypadku a).
Wyszukiwarka
Podobne podstrony:
Transformator położenia kątowego
TRANSFORMATOR POŁOŻENIA KĄTOWEGO
Sprawko Mikronapędy Transformator położenia kątowego
Sprawko Mikronapędy Transformator położenia kątowego
Selsyn transformatorowy ściąga, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne
TRANSF resorwer wydruk, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Silnikkrok, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
silnik, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Praca równoległa transformatorów trójfazowych (2) (1), Elektrotechnika, Rok 2, Maszyny Elektryczne
tarczowy, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Silnik uniwesalny, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
resolwer, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
silnik2faz, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Silnik wykonawczy dwufazowy, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
selyny2, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
pr$dni~4, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
tachospr, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Transformator, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elektro
Badanie prądnicy synchronicznej trójfazowej(1), Elektrotechnika, Rok 3, Maszyny elektryczne
więcej podobnych podstron