Wydział Fizyki i Techniki Jądrowej |
Andrzej Stanisławczyk , Sebastian Wroński |
Zespół |
|||
Rok 2 |
Temat : Silnik Asynchroniczny |
Nr. ćwicz 4 |
|||
Data wyk.
|
Data oddania |
Zwrot do pop. |
Data oddania |
Ocena : |
Podpis : |
Dane znamionowe maszyn :
Silnik typ : SZUA a54a
P = 3 kW cosϕ = 0,8
Ust = 220/380 V Ist = 12,3/7,1 A
Uw = 62 V Iw = 34 A
n = 1430 obr/min rodzaj pracy : ciągła
prąd 3 ~ klasa izolacji A
Prądnica : PBB a34a
P = 2,8 kW n = 1440 obr/min
U = 115 V I = 1,3 A
temp pracy 35 OC rodzaj pracy : ciągła
Typ maszyny rozpoznajemy według następujących reguł :
S - silnik asynchroniczny
P - prądnica
B - obcowzbudna
U - wirnik uzwojony
J - wirnik klatkowy
Z - obudowa zamknięta
B - obudowa chroniona
C - okapturzona
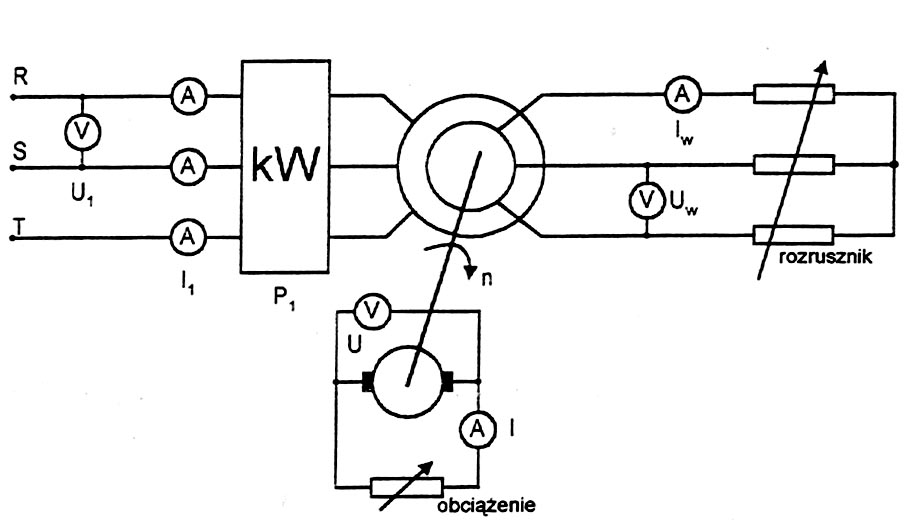
Schemat układu pomiarowego :
Tabela pomiarów :
U1 |
I1 |
P1 |
Iw |
n |
U |
I |
P2 |
M |
cos(fi) |
n |
V |
A |
kW |
A |
obr/min |
V |
A |
kW |
Nm |
|
|
400 |
4,5 |
0,6 |
0 |
1500 |
5 |
0 |
0 |
3,8 |
0,192 |
0 |
400 |
5 |
1,6 |
<14 |
1460 |
110 |
10 |
1,1 |
10,41 |
0,461 |
0,687 |
400 |
5,5 |
2,2 |
17,5 |
1440 |
110 |
16 |
1,76 |
14,51 |
0,577 |
0,8 |
400 |
6,5 |
2,6 |
22 |
1420 |
110 |
20 |
2,2 |
17,39 |
0,577 |
0,846 |
400 |
7 |
3 |
26 |
1410 |
110 |
23 |
2,53 |
20,21 |
0,618 |
0,843 |
400 |
7 |
3,3 |
28 |
1400 |
115 |
24,5 |
2,82 |
22,39 |
0,680 |
0,854 |
400 |
8 |
4,1 |
36 |
1380 |
145 |
25 |
3,6 |
28,22 |
0,739 |
0,878 |
cos ϕ = ![]()
![]()
![]()
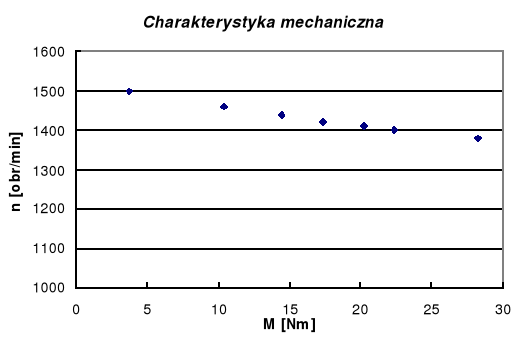
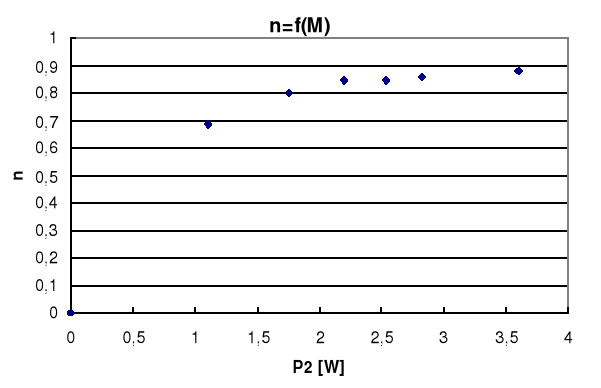
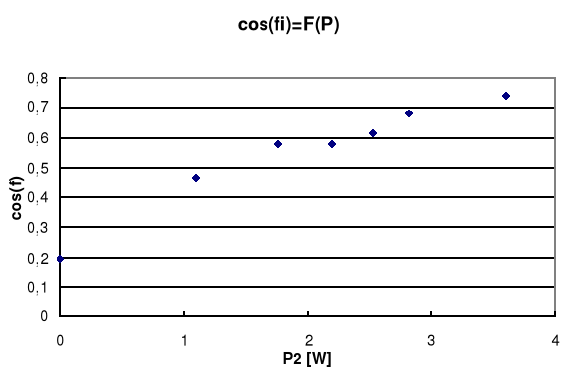
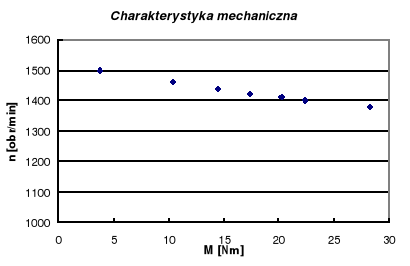
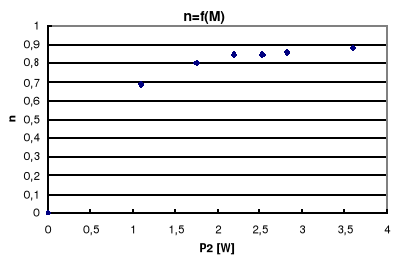
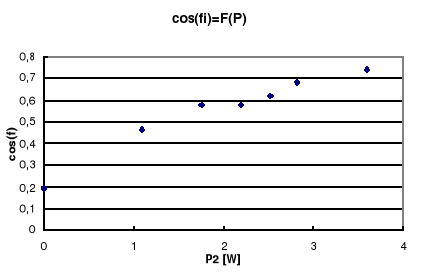
Otrzymane charakterystyki :
Tryby pracy maszyny :
ciągła
przerywana
dorywcza
Budowa i zasada działania :
Trójfazowy silnik asynchroniczny składa się z nieruchomej części zwanej stojanem , oraz ruchomej części noszącej nazwę wirnika . Obie te części łącznie ze szczeliną powietrzną pomiędzy wirnikiem i stojanem zawierają obwód magnetyczny silnika . W celu zmniejszenia strat w żelazie obwód magnetyczny wirnika i stojana wykonane są z izolowanych miedzy sobą nakrzemionych blach o grubości ok. 0,5 mm . Na obwodzie rdzeni stojana i wirnika znajdują się żłobki , wewnątrz których umieszczone są uzwojenia , W żłobkach stojana umieszczone są cewki uzwojenia trójfazowego . Cewki te mogą być połączone w gwiazdę lub w trójkąt . Uzwojenie stojana zasilane jest z sieci trójfazowego prądu przemiennego . Wewnątrz żłobków na obwodzie wirnika silnika asynchronicznego pierścieniowego umieszczone jest uzwojenie trójfazowe połączone w gwiazdę . Początki tych uzwojeń dołączone są do trzech pierścieni ślizgowych osadzonych na wale . Do pierścieni tych za pośrednictwem szczotek przyłącza się opornik służący regulacji prędkości obrotowej lub opornik służący do rozruchu . W silnikach asynchronicznych klatkowych uzwojenie wirnika stanowi zwartą klatkę wykonaną z nie izolowanych prętów miedzianych lub aluminiowych . W zależności od kształtu przekroju prętów klatki silniki klatkowe dzielą się na klatkowe zwykłe , głebokożłobkowe i dwuklatkowe . W zależności od rodzaju klatki silniki te maj różne charakterystyki mechaniczne oraz różne momenty rozruchowe. Prąd przepływający przez poszczególne cewki uzwojenia wytwarza w każdej zmienny strumień magnetyczny . Ponieważ uzwojenie stojana zasilane jest prądem trójfazowym , wartość maksymalna prądu w poszczególnych fazach przesunięta jest o 120 O . Cewki uzwojenia stojana tez są przesunięte względem siebie o 120 O . Jeżeli zsumujemy strumienie pochodzące od poszczególnych cewek , otrzymamy strumień wypadkowy . Strumień ten , wiruje wewnątrz stojana i nosi nazwę wirującego pola magnetycznego . Prędkość wirowania pola magnetycznego zależy od liczby par biegunów silnika oraz od częstotliwości prądu zasilającego . Zmiana tych parametrów jest jedną z metod sterowania prędkością oraz rozruchem silnika asynchronicznego . Jeżeli przewody uzwojenia wirnika będą przenikane przez strumień wirującego pola magnetycznego , w przewodach tych zostanie wyindukowana siła elektromotoryczna , której wartość zależy od wartości indukcji magnetycznej , długości przewodów i szybkości przecinania ich przez wirujący strumień magnetyczny . Jeżeli obwód wirnika zostanie zamknięty ( w przypadku silnika pierścieniowego przez opornik rozruchowy ) to w obwodzie tym popłynie prąd . Ponieważ zgodnie z regułą lewej ręki na przewód z prądem działa starająca się przesunąć ten przewód w polu magnetycznym otrzymujemy moment obrotowy nadający ruch wirnikowi . Ponieważ warunkiem koniecznym dla indukowania się siły elektromotorycznej w przewodach wirnika jest przecinanie ich przez strumień magnetyczny , prędkość obrotowa pola wirującego musi się różnić od prędkości obrotowej wirnika , stąd nazwa - silnik asynchroniczny .
Rozruch silników asynchronicznych :
rozruch bezpośredni
rozruch z przełącznikiem gwiazda - trójkąt
rozruch z dodatkowymi oporami czynnymi lub biernymi w obwodzie stojana
rozruch z autotransformatorem rozruchowym
rozruch przy pomocy oporników rozruchowych (tylko silniki pierścieniowe)
Rozruch bezpośredni :
Polega na bezpośrednim włączeniu uzwojenia stojana na pełne napięcie sieci . Jednakże powstaje wtedy duże uderzenie prądowe które wywołuje przy rozruchu silnika spadek napięcia w sieci . W przypadku gdy trzeba ten spadek napięcia wyeliminować ze względu na obowiązujące przepisy lub prace innych urządzeń stosuje się inne metody rozruchu .
Rozruch z przełącznikiem gwiazda - trójkąt :
Uzwojenie stojana silnika klatkowego , przeznaczonego normalnie do pracy w połączeniu w trójkąt , łączy się na czas rozruchy w gwiazdę i dopiero po osiągnięciu odpowiednio wysokiej prędkości obrotowej przełącza je na trójkąt . Rozruch z przełącznikiem gwiazda - trójkąt powoduje trzykrotne zmniejszenie prądu rozruchowego w porównaniu z rozruchem bezpośrednim , przy jednoczesnym trzykrotnym zmniejszeniu momentu silnika .
Rozruch z dodatkowym oporem w obwodzie stojana :
W obwód stojana włącza się dodatkową rezystancje lub reaktancje , Przy przepływie prądu rozruchowego powstaje spadek napięcia na oporniku wskutek czego napięcie fazowe na silniku zmniejsza się . Przy zmniejszeniu prądu rozruchowego do połowy występuje czterokrotne zmniejszenie momentu , co ogranicza zakres stosowania tej metody .
Rozruch z autotransformatorem rozruchowym :
Zastosowanie autotransformatora z zaczepami regulacyjnymi pozwala na stopniowe powiększanie napięcia w czasie rozruchu . Powoduje to jednak zmniejszenie momentu podobnie jak w metodzie poprzedniej .
Rozruch przy pomocy oporników rozruchowych ( tylko silniki pierścieniowe) :
Polega na włączeniu w obwód stojana dodatkowych oporników ograniczających prąd w uzwojeniach wirnika . Rozrusznik taki na ogół składa się z kilku stopni , które w miarę wzrostu prędkości wyłącza się (lub zwiera się) .
Regulowanie prędkości obrotowej :
przez zmianę rezystancji w obwodzie twornika (silnik pierścieniowy)
przez zmianę częstotliwości napięcia na stojanie
przez zmianę liczby par biegunów
Prędkość obrotowa jest zależna od prędkości wirowania pola magnetycznego , a ta z kolei wyraża się wzorem :
![]()
gdzie : f - częstotliwość , p - liczna par biegunów .
Poprzez zmianę tych parametrów możemy regulować prędkość wirowania pola a tym samym prędkość obrotową silnika .
Zmianę kierunku wirowania dokonuje się przez zmianę kierunku wirowania pola wytworzonego przez stojan czyli przez zamianę kolejności faz .
Wyszukiwarka
Podobne podstrony:
Fizyka 1, AGH, i, Laborki, Laborki, Lab, FIZYKA - Laboratorium, WAHADŁA FIZYCZNE
Fizyka 14b, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, fiz lab, franko
Polarymetr Laurenta, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, Polarymet
cw82 - Efekt fotoelektryczny, AGH, i, Laborki, Laborki, Lab, FIZYKA - Laboratorium, Struna i Krzychu
cw 13 - Lepkosc, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, Struna i Krzy
TERMOPAR, AGH, i, Laborki, Laborki, Lab, FIZYKA - Laboratorium, lab-fizyka, Wyznaczanie temperatury
FIZYKA~6, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, lab-fizyka, Moduł sz
cw 3 - Wahadlo Rewersyjne, AGH, i, Laborki, Laborki, Lab, FIZYKA - Laboratorium, Struna i Krzychu
LAB31+, AGH, i, Laborki, Laborki, Lab, FIZYKA - Laboratorium, kondensator
Fizyka 9, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, fiz lab, franko
cw41 - Busola Stycznych, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, Strun
FIZYK~51, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, SOCZEWKI
FIZ5=, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, 052 zalamanie dla ciecz
Fizyka 12b, AGH, agh, programinski, Laborki, Laborki, Lab, FIZYKA - Laboratorium, fiz lab, franko
więcej podobnych podstron