2. KINEMATYKA.
2.1. Podstawowe pojęcia dla ruchu prostoliniowego i krzywoliniowego.
Prędkość
![]()
- wektor przemieszczenia
![]()
; ![]()
prędkość chwilowa
skoro ![]()
![]()
to ![]()
Skoro ![]()
![]()
jest to wektor prędkości średniej
![]()
moduł prędkości średniej
![]()
wartość prędkości średniej
Przyspieszenie
![]()
- przyspieszenie chwilowe
![]()
![]()
jeżeli ![]()
to ![]()
ponieważ ![]()

więc V = V0 + at
Równania skalarne
dla x dla y
ax = const ay = const
Vx = Vx0 + axt Vy = Vy0 + ayt
![]()
![]()
Składanie ruchów na płaszczyźnie.
rzut poziomy
rzut ukośny.
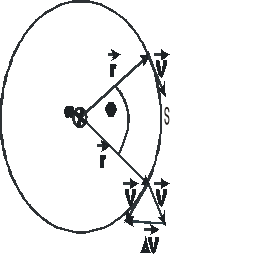
Przykład rzutu poziomego.
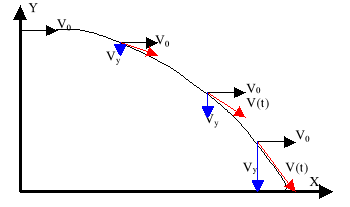
V0 = Vx = const
Dla osi OX: X(t) = Vx⋅t
Ruch jednostajny
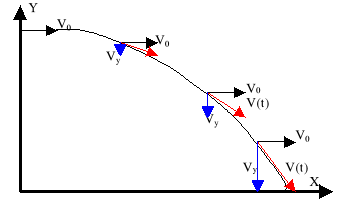
Dla osi OY: Y(t) =

Ruch jednostajnie przyspieszony
1) 
2) 
czyli równanie toru ruchu typu y(t) = bx2 - parabola
![]()
gdzie ![]()
wartość prędkości ![]()
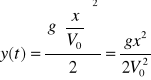
2.2. Ruch po okręgu.
Jednostajny
![]()
![]()
![]()
![]()
![]()
czyli ![]()
Niejednostajny
![]()
![]()
![]()
skoro: ![]()
; ![]()
to ![]()
oraz ![]()
czyli ![]()
analogicznie ![]()
; ![]()
; ![]()
Skoro ![]()
to ![]()
![]()
ostatecznie ![]()
przyspieszenie styczne przyspieszenie dośrodkowe
Wnioski:
kiedy maleje składowa Vy prędkości, to rośnie składowa Vx;
przyspieszenie dośrodkowe skierowane jest wzdłuż promienia, do środka okręgu.
Wyszukiwarka
Podobne podstrony:
Kinematyka, Fizyka laborki, Fizyka (laby i inne)
fizyka 2 KINEMATYKA PUNKTU MATERIALNEGO
FIZYKA KINEMATYKA(1)
Fizyka Kinematyka
Sciaga - Fizyka Kompletne Wzory 2, KINEMATYKA
CI GA, FIZYKA PYTANIA, 1-Kinematyka ruchu punktu materialnego po okręgu
Zadania z kinematyki, Politechnika Gdańska, Budownictwo, Semestr I, Fizyka I, Ćwiczenia
Fizyka kinematyka i dynamika
Fizyka Kinematyka ) marca
Fizyka I Kinematyka 1
fizyka - kinematyka, budownictow, fizyka
fizyka kinematyka pr klucz
Fizyka wykład 3 Kinematyka ruchu obrotowego, Geodezja i Kartografia, Fizyka
8. Kinematyka ruchu obrotowego, Fizyka
Kinematyka i prędkość(1), nauka, fizyka, FIZYKA-ZBIÓR MATERIAŁÓW
więcej podobnych podstron