![]()
POLITECHNIKA RZESZOWSKA
Im. Ignacego Łukasiewicza
Wydział Budowy Maszyn i Lotnictwa
Katedra Awioniki i Sterowania
Laboratorium Podstaw Elektroniki
Temat: Regulator temperatury.
Katarzyna Kozendra
Łukasz Krawczyk
Gr.L4
II LiK
1.Wstęp teoretyczny.
Regulator E5CK firmy Omron pozwala na wykonywanie pomiarów w dwóch trybach: ON/OFF- spełnia wtedy funkcjię regulatora dwupołożeniowego oraz PID- funkcja o działaniu ciągłym (wproporcjonalno-różniczkowo-całkujący).
Regulator dwupołożeniowy- jest najprostszym układem regulacji ze sprzężeniem zwrotnym. Regulator posiada możliwość ustawienia wartości zadanej i posiada dwa stany wyjściowe. Charakteryzuje się punktem przełączania, równym wartości zadanej, powyżej której jego wyjście przyjmuje jeden stan, a poniżej której wyjście przyjmuje drugi stan. Cechą charakterystyczną dla pracy regulatora dwupołożeniowego jest ciągłe oscylowanie błędu regulacji - stan obiektu podlega ciągłym wahaniom wokół wartości zadanej. Amplituda drgań zależy od własności dynamicznych regulowanego obiektu oraz czujnika pomiarowego. Jeżeli bezwładność obiektu lub czujnika pomiarowego jest duża, to pojawiają się oscylacje wartości wyjściowej o poziomie niemożliwym do zaakceptowania.
Regulator o działaniu ciągłym (w naszym przypadku PID)-jego podstawową cechą charakterystyczną jest ciągłość sygnału wyjściowego zarówno jeśli chodzi o jego poziom jak i dziedzinę czasu. Sygnał sterujący regulatorów o działaniu ciągłym jest wyznaczany w zależności od uchybu regulacji, czyli wartości o jaką różni się stan obiektu od wartości zadanej. Składa się z trzech członów:
- części proporcjonalnej Kp* e(t) - uwzględniającej stan aktualny obiektu. Aktualny uchyb mnoży przez wzmocnienie proporcjonalne i podaje tak utworzony sygnał na wyjście regulatora.
- części całkująca Ki *1/Ti∫e(t)dt - uwzględniającej stan przeszły obiektu. Co okres całkowania sumuje wartość uchybu. Zsumowaną wartość mnoży przez wartość wzmocnienia części całkującej i tak uzyskany sygnał podaje na wyjście regulatora.
-część różniczkująca Td*(d/dt)e(t) - uwzględnia stan przyszły obiektu. Obliczona pochodna jest informacją o szybkości przyszłych zmian stanu obiektu. Pochodna jest mnożona przez współczynnik oznaczający czas wyprzedzenia i dodawana na wyjście regulatora.
-części różniczkującej Td*(d/dt)e(t) - uwzględniającej stan przyszły obiektu. Obliczona pochodna jest informacją o szybkości przyszłych zmian stanu obiektu. Pochodna jest mnożona przez współczynnik oznaczający czas wyprzedzenia i dodawana na wyjście regulatora.
Ogólne równanie opisujące pracę regulatora PID ma postać:
u(t)=Kp* e(t) +Ki *1/Ti∫e(t)dt +Td*(d/dt)e(t)
gdzie:
e(t) - uchyb
Kp - wzmocnienie części proporcjonalnej regulatora
Ki - wzmocnienie części całkującej
Ti - stała czasowa całkowania
Td - stała czasowa różniczkowania - czas wyprzedzenia
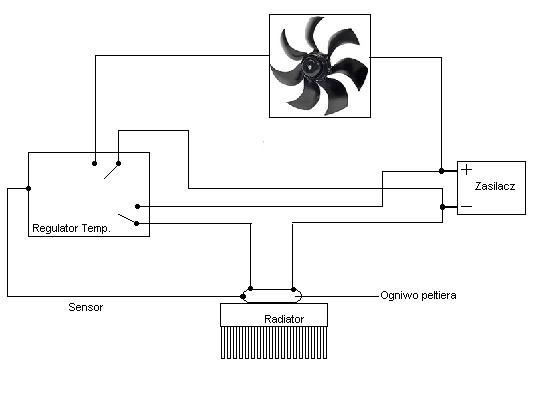
Stanowisko badawcze.
Stanowisko pomiarowe
2. Cel i przebieg ćwiczenia.
Podłączenie elementów według schematu.
Zaprogramowanie regulatora na stabilizację temperatury(50oC) w trybie ON/OF.
Zaprogramowanie regulatora na stabilizację temperatury(50oC) regulatorem PID ( 1. dla P=5, I=8, D=3 2. dla P=5, I=8, D=30 3 .dla P=3, I=8, D=30
Rozłączenie układu.
Czas |
Temp. |
[s] |
[°C] |
0 |
31 |
2 |
31,6 |
4 |
35 |
6 |
39,9 |
8 |
43,4 |
10 |
47,3 |
12 |
51,1 |
14 |
52,8 |
16 |
55 |
18 |
56,2 |
20 |
57 |
22 |
57,5 |
24 |
57,6 |
26 |
57,5 |
28 |
57,2 |
30 |
56,5 |
32 |
55,8 |
34 |
55,1 |
36 |
54,2 |
38 |
53,4 |
40 |
52,6 |
42 |
51,8 |
44 |
51,3 |
46 |
50,7 |
48 |
50,2 |
50 |
49,6 |
52 |
49,4 |
54 |
49 |
56 |
48,9 |
58 |
49 |
60 |
49 |
62 |
49 |
64 |
49 |
66 |
49,1 |
68 |
49,2 |
70 |
49,4 |
72 |
49,5 |
74 |
49,6 |
76 |
49,7 |
78 |
49,8 |
80 |
49,9 |
82 |
50 |
83 |
50,1 |
84 |
50,1 |
85 |
50,1 |
86 |
50,1 |
87 |
50,2 |
3.Wyniki pomiarów.
Tryb ON/OF Tryb PID ( dla P=5, I=8, D=3)
Czas |
Temp. |
[s] |
[°C] |
0 |
30 |
2 |
30,7 |
4 |
34,2 |
6 |
38,4 |
8 |
44 |
10 |
48,3 |
12 |
52,1 |
14 |
53,5 |
16 |
52,6 |
18 |
50,9 |
20 |
49,1 |
22 |
48,6 |
24 |
51,7 |
26 |
53,4 |
28 |
52,9 |
30 |
51,5 |
32 |
50 |
34 |
48,7 |
36 |
50 |
38 |
52,1 |
40 |
53,2 |
42 |
52,5 |
44 |
50,8 |
46 |
49,3 |
48 |
48,9 |
50 |
51,2 |
52 |
53 |
54 |
53,2 |
56 |
52,2 |
58 |
50,8 |
60 |
49,7 |
.
Tryb PID (dla P=5, I=8, D=30)
Czas |
Temp. |
[s] |
[°C] |
0 |
33,4 |
2 |
35,9 |
4 |
39 |
6 |
42,9 |
8 |
44,9 |
10 |
45,3 |
12 |
45,4 |
14 |
46,3 |
16 |
48,2 |
18 |
49,4 |
20 |
50,6 |
22 |
51,5 |
24 |
52 |
26 |
52,5 |
28 |
53,2 |
30 |
53,9 |
32 |
54,4 |
34 |
54,9 |
36 |
55,1 |
38 |
55,3 |
40 |
55,4 |
42 |
55,6 |
44 |
55,6 |
46 |
55,6 |
48 |
55,5 |
50 |
55,3 |
52 |
55,2 |
54 |
55 |
56 |
54,8 |
58 |
54,5 |
60 |
54 |
62 |
53,8 |
64 |
53,4 |
66 |
53,2 |
68 |
52,9 |
70 |
52,5 |
72 |
52,2 |
74 |
51,8 |
76 |
51,5 |
78 |
51,2 |
Czas |
Temp. |
[s] |
[°C] |
80 |
50,9 |
82 |
50,7 |
84 |
50,4 |
86 |
50,1 |
88 |
50 |
90 |
49,7 |
92 |
49,6 |
94 |
49,4 |
96 |
49,3 |
98 |
49,2 |
100 |
49,1 |
102 |
49 |
104 |
48,9 |
106 |
48,9 |
108 |
48,8 |
110 |
48,8 |
112 |
48,8 |
114 |
48,8 |
116 |
48,8 |
118 |
48,9 |
120 |
48,9 |
122 |
49 |
124 |
49 |
126 |
49 |
128 |
49,1 |
130 |
49,2 |
132 |
49,3 |
134 |
49,3 |
136 |
49,4 |
138 |
49,5 |
140 |
49,5 |
142 |
49,6 |
144 |
48,7 |
146 |
49,8 |
148 |
49,8 |
150 |
49,9 |
152 |
50 |
154 |
50,1 |
156 |
50 |
158 |
50,1 |
Tryb PID ( dla P=3, I=8, D=30)
Czas |
Temp. |
[s] |
[°C] |
0 |
33,6 |
2 |
33,6 |
4 |
35 |
6 |
38,7 |
8 |
42,5 |
10 |
44,9 |
12 |
46 |
14 |
46,6 |
16 |
47,2 |
18 |
48,1 |
20 |
49,2 |
22 |
49,9 |
24 |
50,7 |
26 |
51,1 |
28 |
51,5 |
30 |
52,1 |
32 |
52,6 |
34 |
53,1 |
36 |
53,2 |
38 |
53,3 |
40 |
53,4 |
42 |
53,6 |
44 |
53,8 |
46 |
53,8 |
48 |
53,9 |
50 |
53,6 |
52 |
53,5 |
54 |
53,4 |
56 |
53,3 |
58 |
53,2 |
60 |
52,9 |
62 |
52,6 |
64 |
52,4 |
66 |
52,3 |
68 |
52,1 |
70 |
51,9 |
72 |
51,6 |
74 |
51,3 |
76 |
51,1 |
Czas |
Temp. |
[s] |
[°C] |
78 |
51 |
80 |
50,8 |
82 |
50,5 |
84 |
50,3 |
86 |
50,1 |
88 |
50 |
90 |
50 |
92 |
49,8 |
94 |
49,6 |
96 |
49,5 |
98 |
49,5 |
100 |
49,4 |
102 |
49,4 |
104 |
49,3 |
106 |
49,3 |
108 |
49,2 |
110 |
49,3 |
112 |
49,3 |
114 |
49,3 |
116 |
49,2 |
118 |
49,3 |
120 |
49,3 |
122 |
49,4 |
124 |
49,4 |
126 |
49,4 |
128 |
49,4 |
130 |
49,5 |
132 |
49,6 |
134 |
49,7 |
136 |
49,7 |
138 |
49,7 |
140 |
49,7 |
142 |
49,8 |
144 |
49,9 |
146 |
49,9 |
148 |
49,9 |
150 |
49,9 |
151 |
50 |
152 |
50,1 |
4.Wykresy.
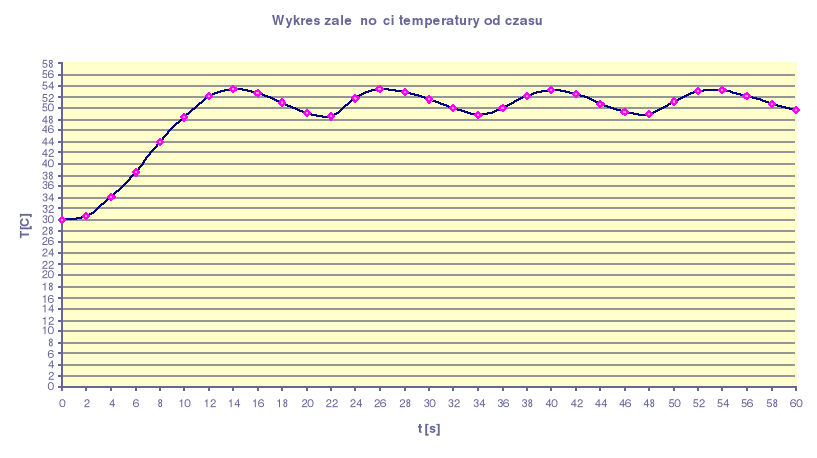
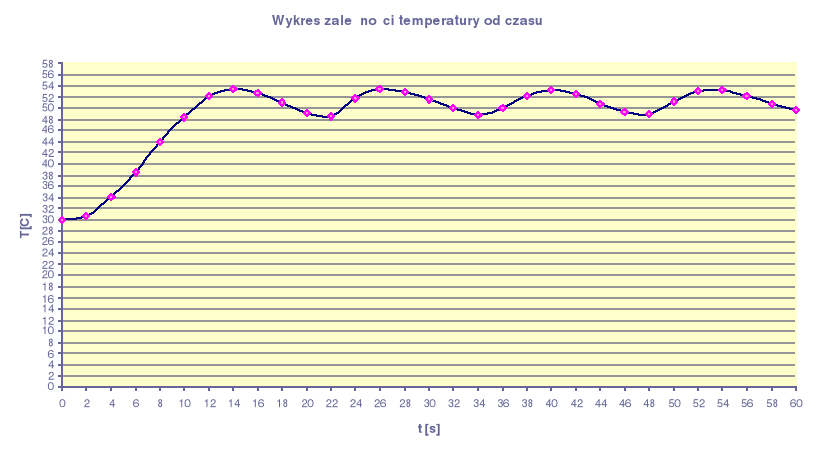
Tryb ON/OF
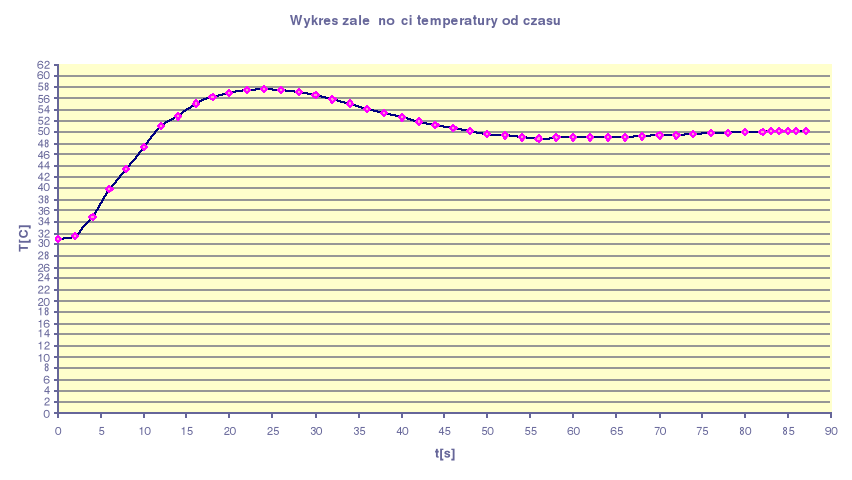
Tryb PID ( dla P=5, I=8, D=3)
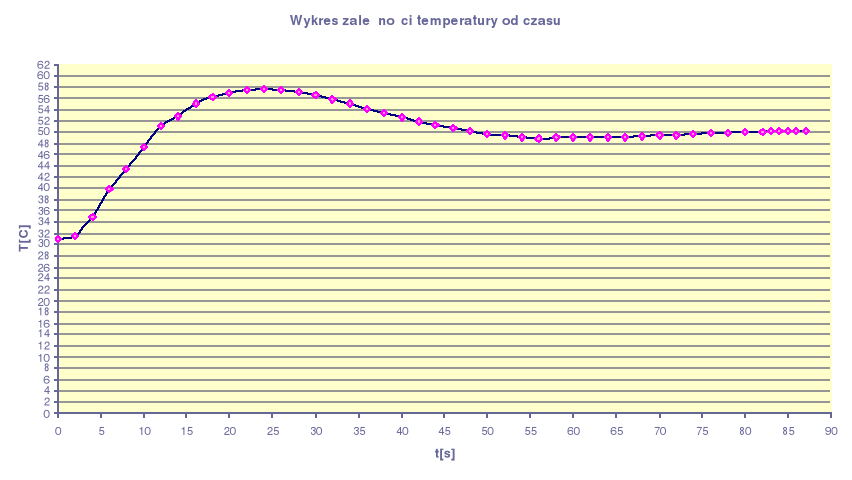
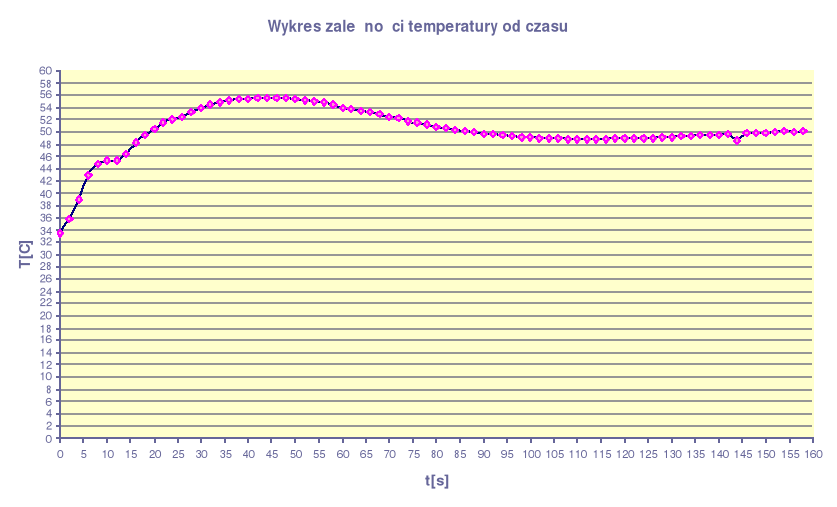
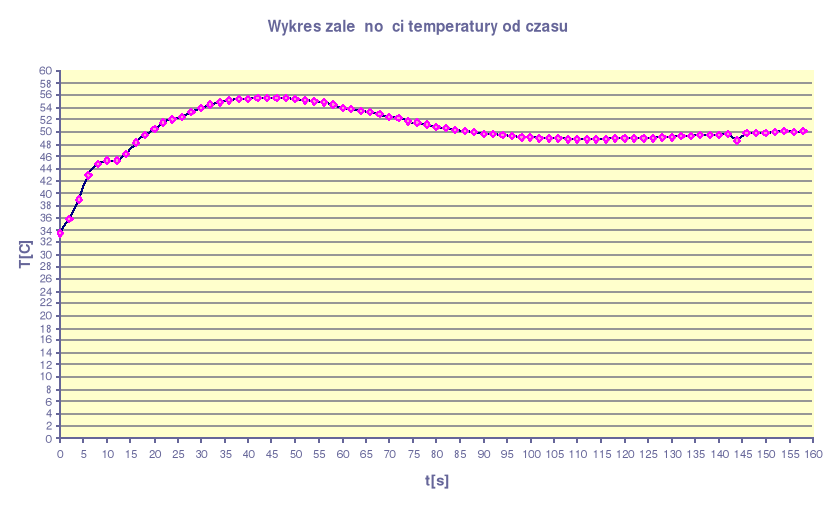
Tryb PID (dla P=5, I=8, D=30)
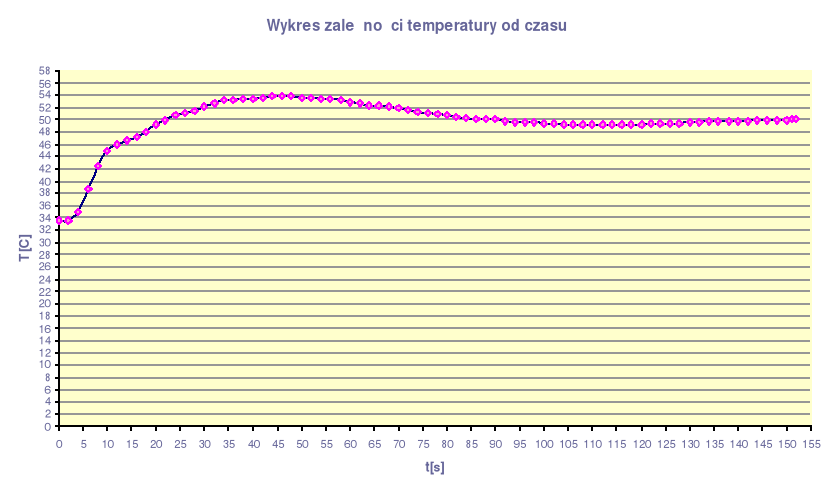
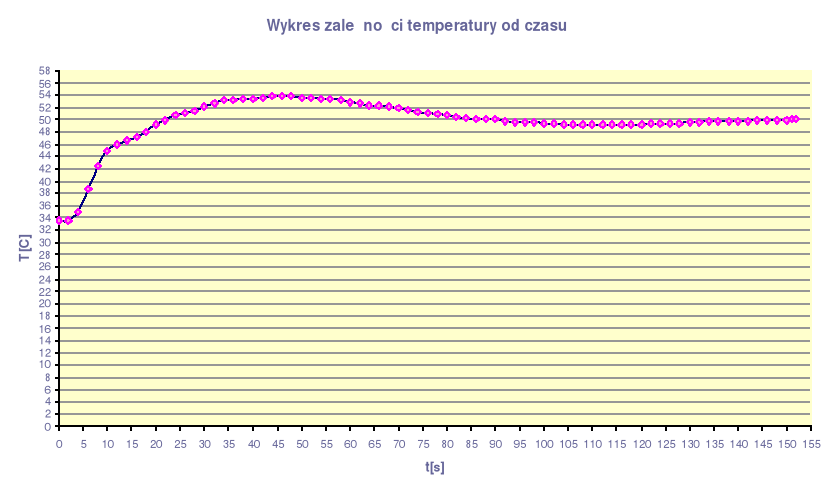
Tryb PID ( dla P=3, I=8, D=30)
4.Wnioski.
Z wykresu przedstawiającego zależność temperatury od czasu dla regulatora ustawionego w tryb dwupołożeniowy (wykres I) jasno wynika, że regulator cały czas oscyluje wokół zadanej temperatury- raz powyżej niej, drugi raz poniżej. Przeprowadzone pomiary potwierdziły charkterystyczną cechę tego regulatora, a mianowicie w/w oscylowanie wokół zadanej wartości. Kolejne trzy wykresy przedstawiają zależność temperatury od czasu dla regulatora PID przy różnych nastawach czasów różniczkowania. Cechą wspólną dla tych wykresów, odróżniającą działanie regulatora PID od dwupołożeniowego jest fakt, że regulator ten po pewnym czasie stabilizuje temperaturę na zadanym poziomie. Zmiana nastaw czasu różniczkowania wpływa na wydłużenie czasu po którym regulator ustabilizuje temperaturę na zadanym poziomie oraz wpływa na jej wartość przy której regulator zacznie ją stabilizować (2'C różnicy na korzyść nastawy D=30 w porównaniu do D=3). Sprawia to, że proces regulacji temperatury ma łagodniejszy przebieg- kształt wykresu po zmianie nastawy jest bardziej płaski. Natomiast zmiana wspólczynnika proporcjonalności nie wpływa na kształt przebiegu (wykres dla nastawy P= 3 jest podobny do wykresu dla nastawy P=5), lecz obniża o 2'C próg temperatury, przy którym regulator zacznie stabilizować temperature do zadanego poziomu.
Wyszukiwarka
Podobne podstrony:
sprawko ZEN, Studia, Elekronika, Sprawozdania, Z innych grup
Pneumatyka sprawko cw1, Studia i nauka, Sprawozdania i notatki, Napędy hydrauliczne i pneumatyczne,
Pneumatyka sprawko cw3, Studia i nauka, Sprawozdania i notatki, Napędy hydrauliczne i pneumatyczne,
sprawozdanie Elektra 1, Studia, SEMESTR 6, SPRAWOZDANIA, eie, sprawka dodatkowe eie
sprawko ema15[1], STUDIA, V semestr, SIP3, SPRAWOZDANIA, brak tematu
sprawko trans R, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektronika II, Elektra, Elekt
SPRAWKO LUTOWANIE, Studia, Materiały do sprawozdań
laborki-ISZKNOM2, Studia, SEMESTR 6, SPRAWOZDANIA, eie, 2 seria moje sprawko, elektronika seria 2 sp
Spektrometr-76, Studia, Fizyka, Sprawozdania, 76a
Wahadlo matematyczne, Studia, pomoc studialna, Fizyka- sprawozdania
Sprawko spawalnictwo 1, studia, studia Politechnika Poznańska - BMiZ - Mechatronika, 2 semestr, obro
Fizyka ćw. 1, Studia, I rok, Sprawozdania z biofizyki
sprawko zmacniecze, studia
Sprawozdanie E-9 stary word, Studia, Fizyka, Sprawozdania
sprawko 11, Studia, PWR, 3 semestr, Logika układów cyfrowych, laboratoria
Sprawozdanie moje1, studia, Nawierzchnie, Sprawozdanie
sprawko 7, aaa, Studia sem V 10.12.14
sprawko 3a, Studia, PWR, 3 semestr, Logika układów cyfrowych, laboratoria
sprawko 11a, Studia, PWR, 3 semestr, Logika układów cyfrowych, laboratoria
więcej podobnych podstron