EAIE |
Imię i nazwisko: Dominika Łuszczuk |
Rok I |
Grupa IV |
Zespół 2 |
||
Pracownia fizyczna I |
Szacowanie niepewności w pomiarach laboratoryjnych |
Nr ćwiczenia 0 |
||||
Data wykonania:
|
Data oddania:
|
Zwrot do poprawy:
|
Data oddania:
|
Data zaliczenia:
|
Ocena:
|
|
Niepewność i błąd pomiaru
Liczba otrzymana w wyniku procedury pomiaru (wraz z jednostką) nie zawiera pełnej informacji na temat mierzonej wielkości. Niezbędne jest również podanie informacji o dokładności wykonanego pomiaru poprzez oszacowanie niepewności wyniku. Rozróżnia się dwie podstawowe metody szacowania niepewności:
-dla serii pomiarowej, w której dominujący wkład do niepewności mają tzw. niepewności przypadkowe (wymaga to zastosowania przyrządu pomiarowego o odpowiedniej dokładności) jako niepewność przyjmuje się tzw. odchylenie standardowe,
-w przypadku wykonania pojedynczego pomiaru, w sytuacji gdy dominujący jest wkład tzw. niepewności systematycznej związanej z dokładnością przyrządu (np. przy pomiarze długości kartki linijką jest to działka elementarna linijki).
Należy przy tym podkreślić, że - o ile to możliwe - należy starać się tak zaplanować pomiar by dominujący był czynnik niepewności przypadkowych i by można było wykonać serię pomiarów, gdyż pozwala to na uzyskanie większej dokładności.
Warto dodać, że niepewności pomiarowe są nieodłącznym elementem każdego prawidłowo przeprowadzonego pomiaru i - w przeciwieństwie do błędu pomiarowego, który można wyeliminować (jest on zasadniczo wynikiem błędu eksperymentalnego) - nie można ich wyeliminować.
Przyjmuje się, że niepewność wyniku pomiaru zaokrągla się do maksymalnie dwóch cyfr znaczących i wynik pomiaru podaje się z miejscami znaczącymi zgodnymi z niepewnością.
Pomiar jednokrotny
Często spotykamy się z sytuacją, gdy dany pomiar wykonujemy tylko jeden raz. Należy wtedy przyjąć, że dokładność takiego pomiaru równa jest działce elementarnej przyrządu, chyba że producent określił z jaką dokładnością mierzy dany przyrząd (często podawana klasa przyrządu). Nieraz jednak zdarza się, że działka elementarna przyrządu jest mniejsza od rzeczywistej dokładności (np. pomiar czasu spadania przedmiotu przy użyciu stopera z działką 0,01s) i wtedy należy niepewność oszacować kierując się zdrowym rozsądkiem, lub też - co daje lepsze wyniki - wykonać serię pomiarową i obliczyć niepewność standardową.
Rozkład Gaussa, gęstość prawdopodobieństwa.
Definicja (rozkład prawdopodobieństwa)
Rozkładem prawdopodobieństwa na zbiorze liczb rzeczywistych R nazywamy każdą miarę probabilistyczną na B(R) [B(R) to sigma algebra zbiorów borelowskich na R].
Definicja (gęstość rozkładu prawdopodobieństwa)
Jeśli miara μ jest rozkładem prawdopodobieństwa na R i dla pewnej funkcji f:R→R całkowalnej w sensie Lebesquea mamy:
μ (A) = (całka po A z funkcji f(x), gdy A ∈ B(R) )
to funkcję f nazywamy gęstością rozkładu μ.
Z definicji wynika, że gęstość dowolnego rozkładu prawdopodobieństwa jest nieujemna oraz całkowalna do jedynki.
Z drugiej strony: każda funkcja całkowalna do jedynki i nieujemna jest gęstością rozkładu jakiegoś prawdopodobieństwa ( i jest to jeden jedyny rozkład).
Czyli gęstość jednoznacznie wyznacza rozkład.
Rozkład Gaussa (inaczej: rozkład normalny).
Rozkład Gaussa to rozkład prawdopodobieństwa wyznaczony przez gęstość daną wzorem:
Rozkład ten oznaczamy N(μ,σ2), gdzie μ i ,σ2 są parametrami rozkładu normalnego.
Pomiary wielokrotne
W przypadku, gdy dominujący na wynik pomiaru jest wpływ różnych czynników przypadkowych najlepszym wyjściem jest wykonanie serii pomiarów, przy czym - ze względu na liczebność próby losowej - dobrze jest powtórzyć pomiar co najmniej 10-krotnie. Można wykazać, że takim przypadku rozkład otrzymanych wyników jest rozkładem Gaussa. Udowadnia się, że w takim przypadku najlepszym estymatorem wartości oczekiwanej wyniku pomiaru jest wartość średnia zmierzonych wielkości:
![]()
[1]
najlepszym estymatorem odchylenia standardowego pojedynczego pomiaru jest wielkość:
zaś najlepszym estymatorem odchylenia standardowego wartości średniej jest:
Znaczenie poszczególnych wielkości jest następujące. Wartość średnia uzyskanych rezultatów jest najbardziej prawdopodobną wartością rzeczywistą mierzonej wielkości. Statystyczne znaczenie odchylenia standardowego pojedynczego pomiaru mówi, że z prawdopodobieństwem około 68% wartość kolejnego wykonanego pomiaru będzie zawierała się granicach ![]()
, zaś dla odchylenie standardowego wielkości średniej, że wartość średnia kolejnej serii pomiarowej będzie z prawdopodobieństwem około 68% zawierała się w przedziale ![]()
.
Pomiary złożone
W sytuacji, gdy wykonujemy pomiary kilku wielkości fizycznych x1, x2, ... xn i na ich podstawie obliczmy inną wielkość y , która jest funkcją wielkości mierzonych, niepewność standardową możemy obliczyć z zależności:
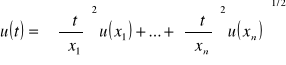
Zależność ta jest poprawna jedynie w przypadku, gdy wielkości x1...xn są statystycznie niezależne oraz niepewności względne ![]()
są małe.
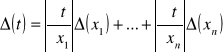
W przypadku, gdy szacujemy niepewność maksymalną zależność na przenoszenie niepewności ma postać:
Przedział i poziom ufności
Przedziałem ufności nazywamy taki przedział wartości mierzonej wielkości, że z określonym prawdopodobieństwem (poziom ufności) wynik kolejnej serii pomiarowej zawarty jest w tym przedziale (oznacza to, że z danym prawdopodobieństwem zawarta jest w nim wartość prawdziwa). W przypadku rozkładu normalnego najczęściej stosowane przedziały i poziomy ufności wynoszą:
przedział ufności: 
poziom ufności: ![]()
Niepewność rozszerzona
Obecnie używana nazwa niepewności rozszerzonej:
![]()
gdzie współczynnik k dobiera się do założonego poziomu ufności. Uwzględnia on informacje o rozkładzie odchyłek pomiarowych. Dla przykładu przy małej liczbie pomiarów współczynnik k dobiera się z tablic rozkładu Studenta.
Obliczenia niepewności
Tabela przedstawia wyniki pomiarów z dwóch doświadczeń: obliczania prędkości dźwięku w temperaturze 0˚C na podstawie pomiaru długości fali w zależności od częstotliwości, oraz obliczania przyspieszenia ziemskiego poprzez pomiary okresu drgań wahadła matematycznego.
Nr |
Prędkość dźwięku w temperaturze 0˚C vo [m/s] |
Przyspieszenie ziemskie g [m/s2] |
1 |
340,552 |
9,815925 |
2 |
352,865 |
9,543418 |
3 |
361,716 |
9,868569 |
4 |
356,713 |
9,77601 |
5 |
357,868 |
9,826392 |
6 |
333,818 |
- |
7 |
348,152 |
- |
8 |
359,253 |
- |
9 |
344,336 |
- |
10 |
359,151 |
- |
średnia |
351,442 |
9,766 |
S(x) |
2,958 |
0,058 |
uA |
2,958 |
0,058 |
uB |
0,577 |
0,067 |
uC |
1,765 |
0,140 |
x |
351,442 |
9,766 |
uA |
2,958 |
0,058 |
x |
351,442 |
9,766 |
uC |
1,765 |
0,140 |
Obliczenia współczynnika κ
(wykładnika w równaniu adiabaty oraz stosunku ciepł właściwych)
κ = (v2 * μ ) / (R * T)
gdzie: μ = 0,78 * 2 μN + 0,21 * 2 μo + 0,01 * 2 μAr = 29,36 g/ mol
μ = 0,02936 kg/ mol
R = 8,3143 J/mol*K
κ (wartość tablicowa dla powietrza) = 1,4
Po obliczeniu mamy:
κ = 1,56
Niepewność: u(κ) =0,042616 ≈ 0,04
Odchylenie standardowe σ(κ) = 0,153653 ≈ 0,15
Błąd bezwzględny κ: 0, 16
Błąd względny κ: 11,43%
Regresja liniowa
y = ax + b
Wyznaczamy współczynniki a i b prostej na podstawie wzorów:


gdzie: 
Błędy współczynników a i b zostały wyznaczone na podstawie wzorów:
Gdzie: 
s2 = 0,018254806
Wyznaczenie współczynnika sprężystości metodą dynamiczną.
Równanie prostej regresji:
![]()
Gdzie:
Y= T2
X= M
a = 4п2/k
b= 4п2/k * m/3
Wartość k wyznaczamy ze wzoru otrzymanego po przekształceniu:
![]()
![]()
![]()
A ) Dla sprężyny stalowej
W tabeli podano wartości uśrednione pomiarów (w doświadczeniu zmierzono 3 razy czas 10 okresów).
T [s] |
0,982 |
1,025 |
1,090 |
1,281 |
M [kg] |
0,0806 |
0,0906 |
0,108 |
0,1616 |
T2 [s2] |
0,964 |
1,050 |
1,188 |
1,641 |
![]()
![]()
Niepewność wartości k
![]()
![]()
![]()
- sprężyny stalowej
B ) Dla sprężyny mosiężnej
T [s] |
0,371 |
0,384 |
0,417 |
0,504 |
M [kg] |
0,0806 |
0,0906 |
0,108 |
0,1616 |
T2 [s2] |
0,138 |
0,147 |
0,174 |
0,254 |
![]()
![]()
![]()
![]()
![]()
Niepewność wartości k
![]()
[kg/s^2]
![]()
![]()
- sprężyny mosiężnej
Zależność F(x) dla sprężyny stalowej [metoda statyczna]
![]()
Gdzie: g=9,81 [m∙s-2]
Porównanie metod wyznaczania współczynnika sprężystości
|
Metoda statyczna |
Metoda dynamiczna |
Sprężyna stalowa |
|
|
Sprężyna mosiężna |
|
|
Wniosek: wyniki w obu metodach są porównywalne, aczkolwiek metoda statyczna jest dokładniejsza.
Wyznaczenie przyspieszenia ziemskiego poprzez pomiary okresu drgań wahadła dla różnych długości wahadła.
Okres drgań wahadła wynosi:

Po przekształceniu otrzymujemy równanie prostej regresji postaci:
![]()
Gdzie: x = T2
y = 4 п2Δl
a = g
b = - 4п2lo
Stąd mamy: g = a.
၄l [m] |
T1 [s] |
T2 [s] |
T3 [s] |
T4 [s] |
T5 [s] |
Tśr [s] |
u(Tśr) [s] |
Tśr2 [ss] |
u(Tśr2) [s2] |
y = 4 п2Δl [m] |
x2 = (T2) 2 [s4] |
x* y [m * ss] |
0 |
1,56 |
1,57 |
1,69 |
1,59 |
1,56 |
1,593 |
0,056 |
2,54 |
0,18 |
0,000 |
6,452 |
0,000 |
0,2 |
1,8 |
1,81 |
1,8 |
1,81 |
1,8 |
1,804 |
0,005 |
3,25 |
0,02 |
7,888 |
10,563 |
25,635 |
0,4 |
2,03 |
2,01 |
2 |
2,01 |
2,16 |
2,043 |
0,066 |
4,17 |
0,27 |
15,775 |
17,389 |
65,783 |
0,6 |
2,19 |
2,2 |
2,21 |
2,19 |
2,2 |
2,199 |
0,007 |
4,84 |
0,03 |
23,663 |
23,426 |
114,529 |
0,8 |
2,4 |
2,39 |
2,39 |
2,38 |
2,38 |
2,385 |
0,008 |
5,69 |
0,04 |
31,551 |
32,376 |
179,524 |
1 |
2,54 |
2,55 |
2,54 |
2,54 |
2,54 |
2,542 |
0,003 |
6,46 |
0,02 |
39,438 |
41,732 |
254,772 |
1,2 |
2,79 |
2,7 |
2,72 |
2,69 |
2,69 |
2,717 |
0,042 |
7,38 |
0,23 |
47,326 |
54,464 |
349,266 |
1,22 |
2,71 |
2,71 |
2,83 |
2,72 |
2,72 |
2,74 |
0,051 |
7,51 |
0,28 |
48,115 |
56,400 |
361,343 |
5,42 |
|
|
|
|
|
|
|
41,84 |
|
213,756 |
242,801 |
1350,852 |
Po podstawieniu do wzorów otrzymujemy:
a = 9,7135 [m∙s-2] = g
b = -24,08
Niepewności wynoszą:
δa = δ g = 0,14 [m∙s-2]
δb = 0,78 [m]
Z równania b = - 4п2lo mżemy obliczyć także lo - długość początkową wahadła.
lo = b / - 4п2
lo = 0,6106 ≈ 0,61 [m]
δ lo = 0,019 [m]
Wartość tablicowa przyspieszenia ziemskiego wynosi g=9,81 [m∙s-2], więc obliczona wartość g ≈ 9,71 [m∙s-2] jest porównywalna i mieści się w granicach błędu.
Rozkład Gaussa
Poniższa tabela przedstawia pomiary nieznanego oporu w doświadczeniu dotyczącym mostka Wheatstone'a. Rozkład pomiarów jest rozkładem normalnym (Gaussa), co obrazuje histogram.
Rx2 [] |
(Rx2 [] - Rx2 ) /σ |
28,98 |
-1,55 |
32,36 |
-0,32 |
32,22 |
-0,37 |
33,21 |
-0,01 |
33,59 |
0,12 |
33,56 |
|
33,73 |
0,17 |
33,86 |
0,22 |
34 |
0,27 |
33,71 |
0,17 |
34,03 |
0,28 |
34,07 |
0,30 |
34 |
0,27 |
32,87 |
-0,14 |
33,14 |
-0,04 |
32,63 |
-0,23 |
33 |
-0,09 |
33,43 |
0,07 |
34,83 |
0,57 |
40 |
2,45 |
31,5 |
-0,64 |
36,67 |
1,24 |
34,5 |
0,45 |
24 |
-3,36 |
Rx2śr = 33,25
u(Rx2) = σ = 2,75
Prawdopodobieństwo, z jakim występowały poszczególne wyniki:
- w przedziale (Rx2 - σ , Rx2 + σ ) : 83,33 %
- w przedziale (Rx2 - 2σ , Rx2 + 2σ ) : 91,66 %
- w przedziale (Rx2 - 3σ , Rx2 + 3σ ) : 95,83 %.
Wyszukiwarka
Podobne podstrony:
Cwiczenie 000, SZACOWANIE NIEPEWNOŚCI W POMIARACH LABORATORYJNYCH
Szacowanie niepewności w pomiarach laboratoryjnych
5 Metody wykonywania pomiarow i szacowanie niepewnosci pomiaru
B Metody wykonywania pomiarow i szacowanie niepewnosci pomiaru
Metodyka Wykonywania Pomiarow + szacowanie niepewności pomiarowych, Pracownia fizyczna
Szacowanie niepewności pomiarowych w pomiarach fizycznych
0 MOJE szacowanie niepewności pomiarów sprawozdanie 0
Niepewnosc pomiaru w praktyce artykul laboratorium 04 2008
Laboratorium niepewność pomiarów analitycznych
niepewności, Labolatoria fizyka-sprawozdania, !!!LABORKI - sprawozdania, Lab, !!!LABORKI - sprawozda
szacowanie niepewności, laboratorium fizyczne, Laboratorium semestr 2 RÓŻNE
Laboratorium niepewności pomiarowe
TABELA POMIARÓW CW 5, Uczelnia, sem I, fiza, LABORATORIUM, Nowe laborki, Stała planka, Użyte
więcej podobnych podstron