INTERPOLACJA:
Dana jest funkcja y = f (x), ![]()
, dla której znana jest tablica wartości w punktach zwanych węzłami interpolacji. Należy wyznaczyć taką funkcję W(x), aby:
W(x0) = Y0, W(x1) = Y1, ..., W(xn) = Yn
interpolacja funkcji f(x)
Zadaniem interpolacji jest wyznaczenie przybliżonych wartości funkcji zwanej funkcją interpolową w punktach nie będących węzłami interpolacji. Przybliżoną wartość funkcji obliczamy za pomocą funkcji zwanej funkcją interpolującą, która w węzłach ma te same wartości co funkcja interpolowana.
![]()
Interpolacja wielomianowa
W praktyce często używa się bazy złożonej z jednomianów
![]()
Wielomian interpolacyjny ma w tym przypadku postać:
![]()
dodatkowo musi być spełniony warunek:

Powyższy układ równań ma jedyne rozwiązanie względem a1, jeżeli wartości x0, x1, ..., xn są od siebie różne
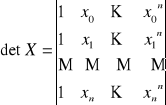
Macierz X-1 dla bazy wielomianowej ![]()
nazywana jest macierzą Lagrange'a
Interpolacja Lagrange'a
W interpolacji wielomianowej Lagrange'a dla n+1 węzłów interpolacji
![]()
przyjmuje się funkcje bazowe w postaci
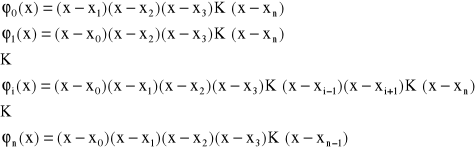
Funkcje te są wielomianami stopnia n zbudowanymi w ten sposób, że w funkcji bazowej φ1 brakuje czynnika (x-xi). Zatem wielomian interpolacji wyraża się następującym wzorem:
![]()
współczynniki a0 ... an tego wielomianu wyznaczamy z równania:
X · A = Y, przy czym macierz X ma postać:

Macierz posiada tylko główną przekątną niezerową w związku z tym układ równań X · A = Y rozwiązuje się natychmiastowo
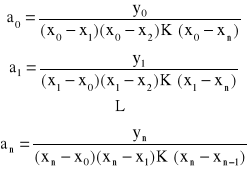
Można więc wielomian interpolacyjny Lagrange'a zapisać w postaci ułamka:
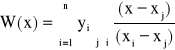
, j = 0, 1, ..., n
Przykład:
Wyznaczyć wielomian interpolacyjny Lagrange'a funkcji f (x) = ex w przedziale [0,2 ; 0,5] mając dane:
f (0,2) = 1,2214, f (0,4) = 1,4918, f (0,5) = 1,6487

APROKSYMACJA
jest to przybliżanie funkcji f(x) zwanej aproksymowaną inną funkcją Q(x) zwaną funkcją aproksymującą. Aproksymacja bardzo często występuje w dwóch przypadkach:
gdy funkcja aproksymowana jest przedstawiona w postaci tablicy wartości i poszukujemy dla niej odpowiedniej funkcji ciągłej
gdy funkcję o dosyć skomplikowanym zapisie analitycznym chcemy przedstawić w „prostszej” postaci
Dokonując aproksymacji funkcji f(x) musimy rozwiązać dwa ważne problemy:
dobór odpowiedniej funkcji aproksymującej Q(x)
określenie dokładności dokonanej aproksymacji
Dobór odpowiedniej funkcji aproksymującej Q(x)
Najczęściej stosowane funkcje aproksymujące są dobierane w postaci wielomianów uogólnionych będących kombinacją liniową funkcji q(x)
![]()
Aproksymacja średniokwadratowa
Poszukujemy takiej funkcji Q(x) przybliżającej daną funkcję f(x), która umożliwi wygładzenie funkcji f(x), czyli pozwoli z zakłóconych błędami danymi wartości funkcji przybliżonej otrzymać gładką funkcję przybliżającą.
Funkcja przybliżająca ma postać
![]()
Przy czym współczynniki ai są tak określone, aby wyrażenie było minimalne.
![]()
![]()
dla i=0, 1, ..., n
Aby wyznaczyć współczynniki ai oznaczamy odchylenie

gdzie Rj jest odchyleniem w punkcie xj.
Następnie obliczamy pochodne cząstkowe funkcji H względem ai. Z warunku
![]()
, gdzie k = 0, 1, ..., n
otrzymujemy układ m+1 równań o niewiadomych ai zwany układem normalnym

, gdzie k = 0, 1, ..., n
w zapisie macierzowym układ przyjmuje postać
![]()
gdzie

Aproksymacja wielomianowa
Jeżeli za funkcje bazowe przyjmiemy ciąg jednomianów (xi), i = 0, 1, ..., n to układ normalny przyjmuje postać
, k = 0, 1, ..., n
co po zmianie kolejności sumowania daje
UKŁADY RÓWNAŃ LINIOWYCH
Rozpatrujemy układ n równań liniowych zawierających n niewiadomych

Układ ten można zapisać także w postaci macierzowej A · X = B, gdzie

metody dokładne: metoda Cramera, metoda eliminacji Gaussa, metoda Crouta (LU)
metody niedokładne: iteracja prosta, Gaussa-Siedla, metoda sukcesywnej nadrelaksacji (SOR)
Metody dokladne
1) Wzory Cramera
Jesli oznaczymy symbolem W wyznacznik główny układu równań
to można wykazać, że ![]()
, W ≠ 0, j = 1, 2, ..., n
Metoda ta należy do metod dokładnych. Ze względu na dużą złożoność obliczeniową praktycznie stosowana do numerycznego rozwiązywania równań.
2) Metoda eliminacji Gaussa
Metoda polega na zapisaniu układu równań w postaci macierzy C, której n pierwszych kolumn zawiera elementy aij macierzy głównej A, natomiast kolumnę n+1 tworzą dowolne wyrazy bi.
Za pomocą wzorów określających nowe współczynniki
![]()
i=2,3,...,n j=2,3,...,n+1
W wyniku otrzymujemy układ:
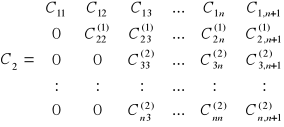
A nowe współczynniki wyrażone są wzorami
i=3, 4, ..., n j=3, 4, ..., n
Kontynuując takie postępowanie po wykonaniu n kroków dochodzimy do układu trójkątnego

Metody niedokładne (iteracyjne)
1) Metoda iteracji prostej (Jakobiego):
Metoda ta dla równania X=W*X+Z polega na przyjęciu zerowego przybliżenia wektora X=Xo, a następnie przeprowadzenia obliczeń iteracyjnych za pomocą zależności:
Xi+1=W*Xi+Z i=0,1,...
Liczba kroków, które należy wykonać, aby uzyskać wymaganą dokładność rozwiązania, jest z reguły dość duża i istotnie zależy od przyjęcia punktu startowego Xo.
2) Metoda Gaussa-Seidla
Stanowi ulepszenie metody iteracyjnej prostej polegające na wykorzystaniu obliczonych k pierwszych składowych wektora Xi+1 do obliczenia składowej k+1. Modyfikacja ta znacznie przyspiesza proces obliczania.
3) Metoda sukcesywnej nadrelaksacji (SOR)
Jest ulepszeniem metody Gaussa-Seidla mającym poprawić szybkość zbieżności procesu iteracyjnego. Istota polega na sukcesywnym wprowadzaniu w miejsce składowych ui po prawej stronie układu wartości
xi + α (ui - xi) α - współczynnik nadrelaksacji, α∈<1,2>
![]()
UKŁADY RÓWNAŃ NIELINIOWYCH
1) Metoda Newtona
Dany jest układ równań nieliniowych z n niewiadomymi
który możemy zapisać w postaci wektorowej f(x)=0
gdzie:
f(x) mają ciągłe pochodne pierwszego rzędu w otoczeniu pierwiastka.
pierwiastka równania
a = x(k) + ε(k)
gdzie x(k) = {x1(k), ..., xn(k)} - k-tym przybliżeniem pierwiastka
![]()
jest błędem pierwiastka przybliżonego
Zastępując błąd ![]()
przyrostem ![]()
otrzymujemy równanie liniowe:
![]()
2) Metoda iteracji
Dany jest układ równań nieliniowych z n niewiadomymi

który możemy zapisać w postaci wektorowej
x=g(x)
gdzie:
Zakładamy, że funkcja g1, g2, ..., gn są rzeczywiste i ciągłe w pewnym otoczeniu odosobnionego pierwiastka a = {a1, ..., an} układu równań.
Metoda iteracji polega na stosowaniu następującego wzoru
xk+1 = g(x(k))
Po przyjęciu przybliżenia ![]()
, w rezultacie otrzymujemy ciąg kolejnych przybliżeń ![]()
pierwiastka a równania.
3) Metoda siecznych
Rozpatrujemy układ równań nieliniowych w postaci

Który możemy ogólnie zapisać w postaci:
f(x)=0
gdzie x jest wektorem n zmiennych.
Metoda iteracji polega na stosowaniu wzoru wyliczającego k-te przybliżenie i-tej zmiennej tych:
KWADRATURY GAUSSA
dobierają takie węzły, aby osiągnąć optymalne przybliżenie całki:
Węzły kwadratury x1, x2,..., xn z przedziału całkowania [a,b] oraz współczynniki c1, c2,...,cn są tak dobrane, aby zminimalizować błąd przybliżenia. Nie zakładamy jednak żadnych ograniczeń na węzły xi o współczynnikach ci natomiast chcemy zmaksymalizować rząd kwadratury.
METODA EULERA
ωi+1=ωi+hf(ti, ωi) (14)
Powyższy wzór nazywamy metodą Eulera - wzór ten nazywany jest inaczej równaniem różniczkowym, gdyż można zapisać:
![]()
(15)
Aby wyznaczyć wartość szukanej funkcji y(x) w następnym kroku h, wykorzystujemy poprzednią wartość funkcji oraz wielkości zmian funkcji - dzięki pochodnej. Natomiast uwzględniając błąd przybliżenia wzór (13) przyjmuje postać:
![]()
, gdzie ![]()
(16)
Lokalny błąd dyskretyzacji τi+1(h)
![]()
(17)
dodatkowo możemy określić krok h, dla którego błąd lokalny jest mniejszy od zadanej dokładności δ
![]()
, gdzie ![]()
Metoda Eulera - wstecz
Powyższe rozważania dotyczyły metody Eulera w przód, ponieważ krok spełniał warunek h>0. W analogiczny sposób można wyprowadzić metodą Eulera wstecz przyjmując h<0, wówczas otrzymujemy:
wi+1 = wi + hf (ti+1, wi+1) (22)
wi+1(k) = wi + hf (ti+1, wi+1(k-1)) (23)
Metoda wstecz różni się w stosunku do metody w przód argumentami funkcji f.
Metoda w przód wykorzystuje do obliczenia przybliżenia wartości z poprzedniego kroku, natomiast metoda wstecz jest równaniem uwikłanym, ponieważ aby obliczyć kolejne przybliżenie wi+1 wykorzystujemy wartości z poprzedniego kroku oraz poszukiwaną wartość wi+1. Takiego równania nie można rozwiązać w sposób
bezpośredni. Aby rozwiązać takie równanie (23) należy zastosować proces iteracyjny, czyli poszukujemy kilkakrotnie
wi+1(k), stojącej po prawej stronie równania podstawiając jako wi+1(k-1) - lewa strona równania, wynik przybliżenia z poprzedniej iteracji (k-1).
METODY RUNGEGO-KUTTY
Powszechnie na całym świecie stosuje się metody Rungego-Kutty czwartego rzędu. Polegają one na rozwiązaniu zagadnienia:
![]()
gdzie t∈ [a,b] oraz y(a)=α (25)
i przedstawieniu różnicy funkcji y(t) w punktach ti+1 oraz ti w postaci:
wi+1 - wi = ![]()
lub inaczej wi+1 - wi = h0 (ti,wi,h) (26)
gdzie m oznacza rząd metody, cj są stałymi, a

gdzie αj, βj, γj, δlj - stałe
h - krok całkowania
Określenie stałych cj, αj, βj otrzymujemy poprzez rozwinięcie funkcji f(t,y) w szereg Taylora w otoczeniu punktu ti
Metody R-K - metoda 2 rzędu
Metoda wyprowadzona przez rozwinięcie f(t,y) w szereg Taylora 2 rzędu pozwala określić stałe c1, α1,β1, c2, α2, β2 :
Metoda punktu środkowego:
C1 = 0 C2 = 1 α1 = 0 α2 = h/2 β1 = 0 β2 = ½ (28)
wówczas możemy zapisać:
k1=hf (ti,wi) k2=hf (ti + ½ h, wi + ½ k1)
ostatecznie:
wi+1=wi+k2
lub
wi+1=wi + hf(ti + h/2, wi + h/2 * f(ti, wi))
KWADRATURY NEWTINA-COTESA
Całkowanie z zastosowaniem kwadratur o ustalonych węzłach polega na zastąpieniu funkcji podcałkowej wielomianem interpolacyjnym Lagrange'a Li(x).
Jeżeli dla skończonego przedziału [a,b] wybierzemy zbiór punktów węzłowych {x0, ..., xn} takich, że:
xi = x0 + i · h
gdzie:
![]()
dla wówczas=(0, 1, …, n)
n - oznacza również stopień wielomianu interpolacyjnego
Oatecznie wzór kwadratury Newtona - Cotesa oraz reszta kwadratury

Kwadratury Newtona-Cotesa dają coraz lepszą dokładność wraz ze wzrostem n. Jednak wraz ze wzrostem n wzór na sumę posiada również rosnącą liczbę czynników. Dlatego kwadratur Newtona-Cotesa nie stosuje się dla dużych n
CAŁKA MONTE-CARLO
Mamy obliczyć przybliżoną wartość In całki oznaczonej

(129)
przy założenie, że f(x) jest funkcją ciągłą w przedziale domkniętym [a;b]
Następnie n-krotnie generujemy realizację x zmiennej losowej X o rozkładzie równomiernym w przedziale [a,b], otrzymujemy w rezultacie ciąg liczb x1, x2, ..., xn,
Przybliżoną wartość całki określa wzór
![]()
8
Wyszukiwarka
Podobne podstrony:
Wykres wskazowy transformatora, elektrotechnika PP, studfyja
MARAS, elektrotechnika PP, studfyja
06.pytanka PE opracowane, elektrotechnika PP, studfyja
kpwie, elektrotechnika PP, studfyja, Komputeryzacja Projektowania w Elektronice. Wykład, Opracowania
FA Plan II Niestacjonarny 2012 2013 wersja 18.03.2013, elektrotechnika PP, studfyja
Egzamin techniczny ET z- kluczem PRZYKŁAD KC 14-03-13, elektrotechnika PP, studfyja
Wykres wskazowy transformatora, elektrotechnika PP, studfyja
elektrostatyka pp klucz
Teoria sterowania egzamin, Elektrotechnika PP, 3 Semestr, Automatyka, Kolo kwapisz i florek, Automat
automatyka mpyt, Elektrotechnika PP, 3 Semestr, Automatyka, Kolo kwapisz i florek, Automatyka, autom
Pomiar rezystywności gruntu Aga, elektrotechnika PP
tabelka, Elektrotechnika PP, 3 Semestr, Teoria pola, Szczelina powietrzna
zagadnienia na egzamin, Elektrotechnika PP, 3 Semestr, Automatyka, Kolo kwapisz i florek, Automatyka
Stery sciaga, Elektrotechnika PP, 3 Semestr, Automatyka, Kolo kwapisz i florek, Automatyka, automaty
Automatyka Pyt, Elektrotechnika PP, 3 Semestr, Automatyka, Kolo kwapisz i florek, Automatyka, autom
elektrostatyka pp
więcej podobnych podstron