POLITECHNIKA ŚLĄSKA W GLIWICACH
WYDZIAŁ MECHANICZNY-TECHNOLOGICZNY

Podstawy Konstrukcji Maszyn
Projekt Manipulatora
Marcin Sobiegraj
AiR gr. IV
Sem. V
Spis treści
ZAŁOŻENIA PROJEKTOWO - KONSTRUKCYJNE
Opis działania
Pole możliwych rozwiązań
1.3 Kryteria Projektowe
KONCEPCJA MANIPULATORA
Wybrana koncepcja
Schemat gniazda robota
OBLICZENIA MECHANIZMU MANIPULATORA
Dane sytuacyjne
Dane konstrukcyjne
Obliczenie masy chwytanego przedmiotu
Obliczenia wytrzymałościowe ramienia manipulatora
1. Założenia projektowo - konstrukcyjne
1.1 Opis działania
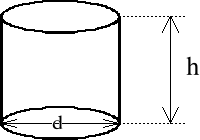
Przedmiotem manipulacji jest półfabrykat w postaci walca. Średnica d jest równa jego wysokości H. Przedmiot ten jest obrabiany na obrabiarkach o wysokościach h1 i h2. Gniazdo robocze ma średnicę podaną jako D. Z góry określona została także masa chwytaka, jak i wymiary przedmiotu obrabianego.
Manipulator wykonywać będzie następujące operacje:
uchwycenie obiektu z magazynu wejściowego,
przemieszczenie obiektu przed uchwyt samocentrujący obrabiarki 1,
wprowadzenie obiektu do uchwytu samocentrującego,
obróbka obiektu (wykonuje obrabiarka 1),
uchwycenie obrabianego przedmiotu przez manipulator,
wysunięcie przedmiotu z uchwytu,
przemieszczenie przedmiotu przed uchwyt obrabiarki 2,
wprowadzenie przedmiotu w uchwyt samocentrujący,
obróbka powierzchni (wykonuje obrabiarka 2),
uchwycenie obrabianego przedmiotu przez manipulator,
manipulacja przedmiotem,
wsunięcie obrobionego przedmiotu do odbiornika
1.2 Pole możliwych rozwiązań
1. |
2. |
|
|
3. |
4. |
|
|
5. |
|
1.3 Kryteria projektowe
Do wyboru rozwiązania konstrukcyjnego posłużyły następujące kryteria:
K1 - minimalna masa manipulatora
K2 - prostota działania i wykonania
K3 - modułowość budowy manipulatora
K4 - błąd pozycjonowania do 0,4 mm
K5 - minimalny koszt wykonania
K6 - zwartość konstrukcji
K7 - minimalna liczba stopni swobody: 2
|
K1 |
K2 |
K3 |
K4 |
K5 |
K6 |
K7 |
ΣK |
Wd |
W1 |
W2 |
W3 |
W4 |
W5 |
K1 |
X |
0,5 |
1 |
0,5 |
1 |
0,5 |
0,5 |
4 |
5 |
2 |
3 |
4 |
2 |
2 |
K2 |
0,5 |
X |
1 |
0,5 |
1 |
0,5 |
0,5 |
4 |
5 |
2 |
3 |
3 |
2 |
3 |
K3 |
0 |
0 |
X |
0,5 |
0,5 |
0,5 |
0 |
1,5 |
5 |
2 |
2 |
3 |
3 |
2 |
K4 |
0,5 |
0,5 |
0,5 |
X |
1 |
1 |
1 |
4,5 |
5 |
4 |
3 |
3 |
4 |
4 |
K5 |
0 |
0 |
0,5 |
0 |
X |
0,5 |
0,5 |
1,5 |
5 |
2 |
4 |
4 |
2 |
3 |
K6 |
0,5 |
0,5 |
0,5 |
0 |
0,5 |
X |
0,5 |
2,5 |
5 |
3 |
3 |
4 |
4 |
3 |
K7 |
0,5 |
0,5 |
1 |
0 |
0,5 |
0,5 |
X |
3 |
5 |
1 |
3 |
5 |
1 |
3 |
|
|
|
|
|
|
|
|
|
Sd |
S1 |
S2 |
S3 |
S4 |
S5 |
|
|
|
|
|
|
|
|
|
105 |
50,5 |
63 |
77 |
54,5 |
62 |
|
|
|
|
|
|
|
|
|
1 |
0,48 |
0,6 |
0,73 |
0,52 |
0,59 |
Na podstawie przeprowadzonej analizy wybieram wariant trzeci.
2. Koncepcja manipulatora
2.1 Wybrana koncepcja
2.2 Schemat gniazda manipulatora
3. Obliczenia mechanizmu manipulatora
3.1 Dane sytuacyjne
Wysokość walca |
H = 150 [mm] |
Średnica walca |
d = 150 [mm] |
Wysokość uchwytu pierwszego |
h1 = 800 [mm] |
Wysokość uchwytu drugiego |
h2 = 1500 [mm] |
Średnica rozstawienia obrabiarek |
D = 2.4 [m] |
Masa chwytaka |
Mch = 7 [kg] |
Współczynnik bezpieczeństwa |
N = 2 |
Przyspieszenie |
1 [m/s2] |
3.2 Dane konstrukcyjne
Uwzględniając wymiary przedmiotu manipulacji i wymiary przewidywanych końcówek chwytnych przyjmuję następujące dane konstrukcyjne:
Długość ramienia manipulatora |
L1 = 1200 [mm] |
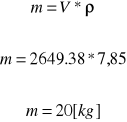
3.3 Obliczam masę chwytanego przedmiotu
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Chwytany przedmiot wykonany jest ze stali konstrukcyjnej 16M PN - 92/H - 84009 o ρ = 7,85 g/cm3.
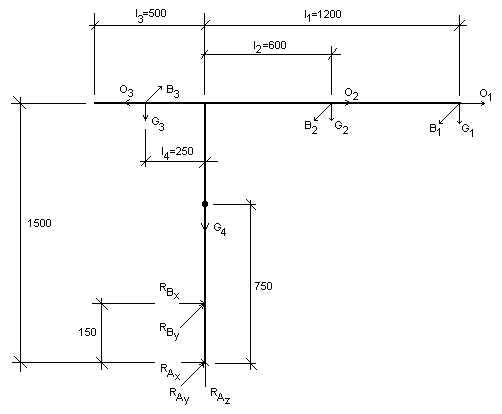
3.4 Obliczenia wytrzymałościowe ramienia manipulatora
Ramię manipulatora wykonane jest z ceownika. Materiał z którego wykonano ceownik to stal, PN - 71/H - 93451.
3.4.1a Parametry ramienia.
G = 7,05 [kg/m]
Ix = 89,4 [cm4]
Wx = 22,4 [cm3]
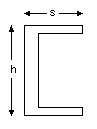
h = 80 [mm]
s = 40 [mm]
3.4.1b Obliczam strzałkę ugięcia ramienia I - go.
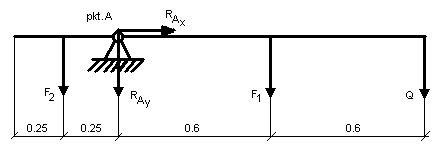
gdzie:
Q - ciężar chwytaka i przedmiotu
F1 - ciężar własny ramienia
F2 - ciężar własny przeciwwagi
Q = Qchw + Qprzedm = 70 + 200 = 270 [N]
F1 = 83,5 [N]
F2 = 34,6 [N]
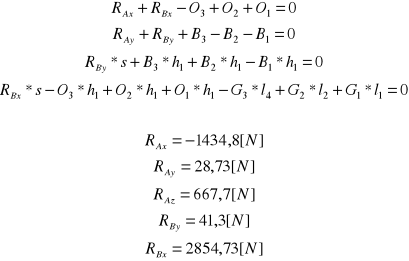
3.4.1c Reakcja podpory.
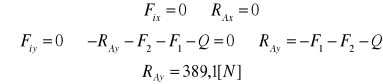
3.4.1d Strzałka ugięcia.
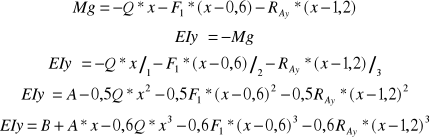
warunek brzegowy w pkt.A
![]()
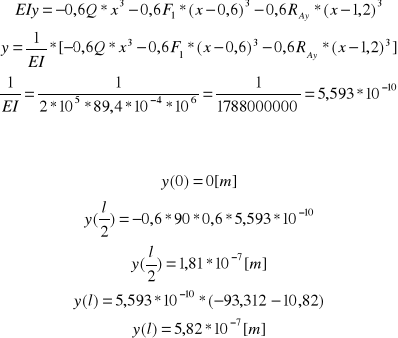
y = 5,82 * 10-7 [m]
y = 0,00582 [mm]
3.4.1e Warunek wytrzymałościowy
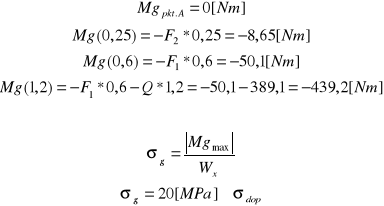
3.4.1f Dobór łożyska
G1 = 270 [N]
G2 = 83,5 [N]
G3 = 34,6 [N]
G4 = 279,6 [N]
v1 = a1t = 2 [m/s]
v2 = 0,5*2 = 1 [m/s]
v3 = 0,25*2 = 0,5 [m/s]
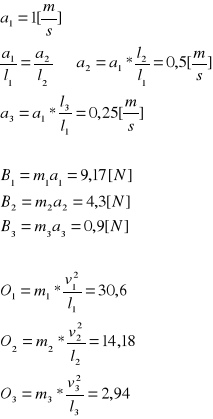
Siły promieniowe w pkt.B
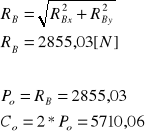
Siły promieniowe i osiowe w pkt.A
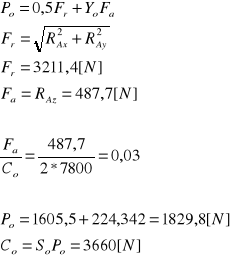
Siły promieniowe
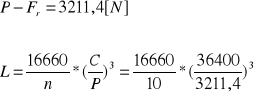
L = 2426028,7 ≈ 2,5 mln godz.
Wyszukiwarka
Podobne podstrony:
Projekt manipulatora, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, A PROJEKT MANIPULA
Konstruowanie katalogowe manipulatorów, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty,
Manipulator 3, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty
Projekt pkm2, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa
pkm, Automatyka i Robotyka, Semestr 5, PKM, projekty
pstan, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa, Manip
man r2, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa, Mani
man r3, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa, Mani
Pytania z PKM, Automatyka i Robotyka, Semestr 5, PKM, pytania
obliczenia do robota, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatoró
Kinematyka odwrotna, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów
Notacja Denavita, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów, p
POLITECHNIKA ŚLĄSKA W GLIWICACH fffffff, Automatyka i Robotyka, Semestr IV, Podstawy Konstrukcji mas
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
interpolacja projekt, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
Analiza cyklogramu szeregowego, Automatyka i Robotyka, Semestr 2, Robotyzacja, projekt, projekt 2
interpolacje projekt2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
więcej podobnych podstron