Kamil Mykas
Bartłomiej Penk Mechatronika Sem VI Gr. B1
Piotr Przybylski
Pakowanie puszek alu z napojami do kartonów w określonym szyku.
Istniejące w przemyśle, rozwiązania manipulatorów i robotów pakujących
Obecnie w przemyśle bardzo powszechnie stosowany jest robot KUKA, wraz ze sterownikami i oprogramowaniem. Do robota wyspecjalizowanego do pakowania przedmiotów stosuje się konkretnie zaprojektowane chwytaki. Przykładowo, do operacji związanych z paletowaniem piwa butelkowanego, chwytak umożliwia zarówno chwycenie 4 skrzynek z pustymi butelkami, 4 kartonów z pełnymi butelkami oraz samych butelek w ilościach do 80 na raz.
Uniwersalny chwytak pozwalający na manipulowanie skrzynkami, kilkoma rodzajami kartonów i samymi butelkami. Stanowisko działa w nastepujący sposób. Pełna paleta zawierająca 5 warstw skrzynek z piwem po 8 skrzynek w warstwie jest wwożona wózkiem widłowym na jedno z dwóch bliźniaczych stanowisk. Później winda ciężka dokonuje pozycjonowania skrzynek na palecie. Przed zdjęciem połowy warstwy skrzynek przez robota, zaciski windy zwalniają się aby zapobiec wyrwaniu skrzynek. Robot chwytakiem przenosi skrzynki na paletę obok, układa je, zasysa butelki i przenosi na transporter do kartoniarki. Po ułożeniu wastwy pustych skrzynek na drugiej palecie, inna winda pozycjonuje je. Program chwytaka robota jest tak zrealizowany, że przed wyjęciem butelek, dodatkowo są one obracane w celu pozycjonowania skrzynek. System jest realizowany poprzez specjalny program, uwzględniający wszystkie miejsca dostaw i zabezpiecznia, przed ruchem w obszarze roboczym manipulatora.
Dobrym przykładem może być również linia produkcyjna wykorzystująca roboty Kawasaki, np. do pakowania wiaderek z farbami czy też worków z serami. Stanowisko pakujące wiaderka wykorzystuje dwa roboty kontrolowane przy pomocy panelu operatorskiego. Robot przenoszący wiadra jak i ten paletyzujący worki jest wyposażony w chwytak podobnie jak w poprzednim wypadku wykorzystujący pneumatykę.
Równie często wykorzystywane są układy spychające bazujące na prostych układach pneumatycznych czy mechanicznych, stosowane np. do pakowania kartonów mleka, czy też farb i lakierów. W takich układach wykorzystuje się system 0-1. Przykładowo, tłok siłownika pneumatycznego dopychający puszkę do krawędzi kartonu albo jest w pozycji całkowicie schowanej lub całkowicie wysuniętej. Podobnie, wykorzystuje się również ramiona bazujące na mechanizmach obrotowych. Realizacja pakowania przy użyciu układów spychających opiera się na "labiryncie", lub jest ustawiona liniowo z wykorzystaniem rolek. Systemy te są trudne w modernizacji są mniej elastyczne aniżeli manipulatory. Układy takie są dużo mniej uniwersalne i dodatkowo obszerne gabarytowo co uniemożliwa zastosowanie ich do pakowania puszek na naszym stanowisku.
Koncepcje manipulatora do pakowania puszek alu
Stół roboczy
Napęd liniowy zasilany serwosilnikiem el.
Napęd liniowy zasilany serwosilnikiem el.
Moduł zapewniający ruch obrtowy napędzany serwosilnikiem el.
Podajnik puszek
Puszki
Przyssawki umieszczone na ramieniu z profili aluminiowych
Karton
Zasada działania: Ramię z przyssawkami obraca się w kierunku podajnika puszek, co zapewnia moduł obrotowy. Napędy liniowe realizują pozostałe ruchy, konieczne do dokładnego pozycjonowania. Po przyssaniu puszek są one delikatnie unoszone ku górze, po czym ramię manipulatora wykonuje obrót o 90 stopni w kierunku kartona, gdzie puszki są opuszczane i ustawiane po 4 w rzędzie.
Karton
Serwosilniki elektryczne (napędy)
Napędy liniowe
Puszka
Stół roboczy
Wózek
Ramię
Przyssawki
Napęd obrotowy
Podajnik puszek
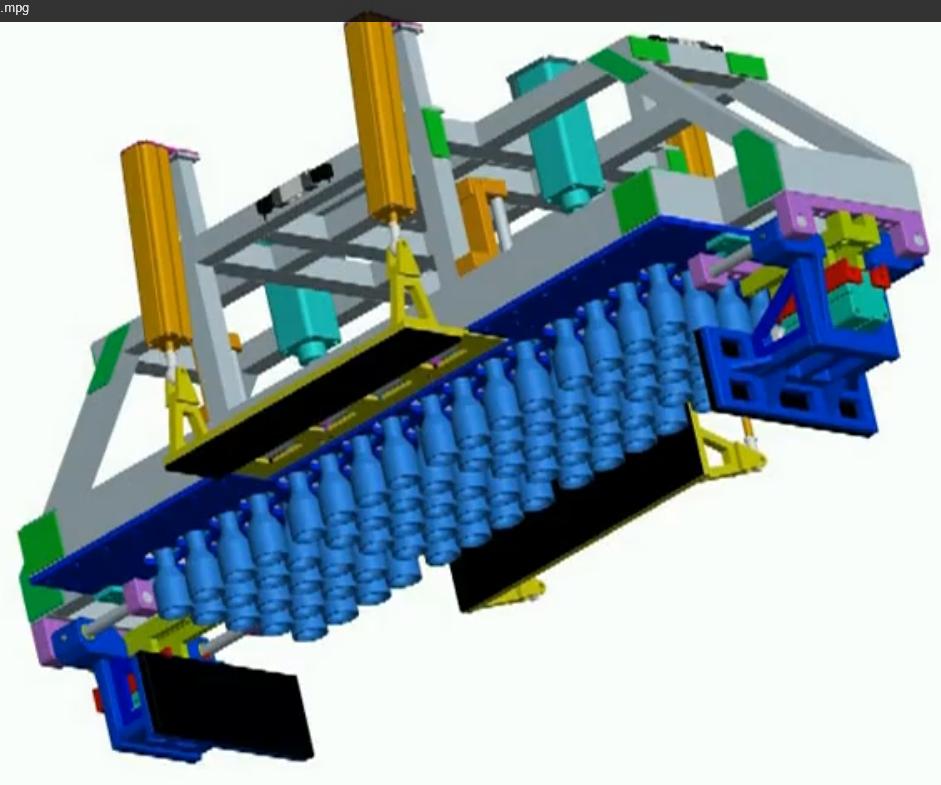
Zasada działania: Ramię zostaje ustawione równolegle z podajnikiem następnie zostaje opuszczone i cztery puszki zostają przyssane, następnie następuje podniesienie ramienia z puszkami, jego obrót w stronę antyzegarową, zjazd ramienia niżej i przesów w strone kartonu w ten sposób aby ustawić puszki przy jego krawędzi. Następnie opuszczenie puszek do kartonu i odpuszczenie przyssawek. Kolejne rzędy puszek ustawiane w ten sam sposób.
Po ustawioniu 5 rzędów czujnik masowy powoduje zsunięcie kartonu z puszkami do pakowarki.
Napęd
Suwnica
Słupy
Chwytak
Puszki
Prowadnice
Możliwy kierunek przesuwu prowadnic
Zasada działania: Elementy 5 (puszki) przesuwają się po 6 (prowadnicy) w ustalonej pozycji, 4 (chwytak) chwyta elementy oraz przenosi je na następną prowadnice, na której może się znajdować np. paleta, usytuowana w odpowiednim położeniu do prowadnicy.
Głównym ruchem procesu jest ruch suwnicy w kierunku osi "Z'"oraz chwytanie przedmiotów. W zależności od przenoszonych elementów jest rozważane zmienienie chwytaków, zmiana prędkości prowadnic oraz zmiana dynamiki procesu przenoszenia.
Cecha |
Koncepcja 1 |
Koncepcja 2 |
Koncepcja 3 |
Waga |
Montaż/Serwis |
9 |
9 |
4 |
0,3 |
Trwałość |
4 |
7 |
6 |
1 |
Cena |
7 |
7 |
8 |
0,8 |
Szybkość działania |
6 |
9 |
6 |
0,6 |
Sztywność |
6 |
8 |
9 |
0,5 |
Masa |
8 |
8 |
4 |
0,4 |
Uniwersalność |
8 |
7 |
3 |
0,2 |
Gabaryty |
5 |
7 |
5 |
0,4 |
SUMA |
25,7 |
32,1 |
25,9 |
X |
Analizując działanie i budowe powyższych rozwiązań koncepcyjnych doszliśmy do wniosku, że koncepcja druga jest najlepsza do realizacji. Cechuje się ona najwyższą sztywnością, oraz środkiem ciężkości położonym najbliżej stołu, co prawdopodobnie zapewni bezawaryjną i bezproblemową pracę urządzenia pakującego. Układ ten jest realizowany przez 3 serwosilniki, z których dwa z nich podłączone są do napędów liniowych (przewidywalnie napędów z paskiem zębatym), oraz trzeci do zapewnienia ruchu modułu obrotowego. Podnoszenie puszek jest możliwe dzięki 4 przyssawkom pneumatycznym. Konstrukcja opiera się na profilach aluminiowych.
Rysunek 2 - Stanowisko robocze
Rysunek 6 - Koncepcja 1
Rysunek 7 - Koncepcja 2
Rysunek 1 - Robot KUKA
Rysunek 3 - Chwytak robota KUKA
Rysunek 4 - Chwytak robota Kawasaki
Rysunek 5 - Linia pakująca
Rysunek 8 - Koncepcja 3
Wyszukiwarka
Podobne podstrony:
SYSTEM TOLL, Mechanika i budowa maszyn, Semestr VI, Informatyka w eksploatacji pojazdów, Prezentacja
Siemens, Mechanika i budowa maszyn, Semestr VI, Informatyka w eksploatacji pojazdów, Prezentacja
GRUNDIG, Mechanika i budowa maszyn, Semestr VI, Informatyka w eksploatacji pojazdów, Prezentacja
ANTENA, Mechanika i budowa maszyn, Semestr VI, Informatyka w eksploatacji pojazdów, Prezentacja
07 opis struktury dokumentacji systemu, Towaroznawstwo UR, SEMESTR VI, SBŻ
Opis formalny-, WAT, semestr VI, Projekt zespołowy
EPS semestr VI, Politechnika Warszawska Wydział Transportu, Semestr VII, Eksploatacja Pojazdów Samoc
od stasi 2, WSZOP INŻ BHP, V Semestr, BUDOWA I EKSPLOATACJA MASZYN I URZADZEN
lab6, MECHATRONIKA 1 ROK PWSZ, SEMESTR II, Metrologia techniczna i systemy pomiarowe, Laborki
Systemy przetwarzania sygnałów sprawozdanie nr 1, WI, Semestr VI, Systemy przetwarzania sygnałów
Strzelecki - kolos-wejściówka -pytania i odp, WAT, semestr VI, systemy operacyjne UNIX
Systemy przetwarzania sygnałów sprawozdanie nr 6, WI, Semestr VI, Systemy przetwarzania sygnałów
odp na pytania, WSZOP INŻ BHP, V Semestr, BUDOWA I EKSPLOATACJA MASZYN I URZADZEN
SAOWACKI SYSTEM PODATKOWY, Finanse Publiczne - semestr VI
sciaga druk, Studia PG, Semestr 06, Budowa Dróg i Autostrad VI, Egzamin
05 zakres zastosowania systemu, Towaroznawstwo UR, SEMESTR VI, SBŻ
Cw05, WAT, SEMESTR VI, Systemy operacyjne Windows
Spraw 2, Mechanika i budowa maszyn, Semestr VI, Urzadzenia elektryczne i elektroniczne w pojezdzie
18 weryfikacja systemu, Towaroznawstwo UR, SEMESTR VI, SBŻ
więcej podobnych podstron