PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA w Chełmie Instytut Nauk Technicznych i Lotnictwa Kierunek: Elektrotechnika IV rok VII semestr |
|||
LABORATORIUM Z NAPĘDU ELEKTRYCZNEGO
|
|||
|
Temat: Regulacja prędkości kątowej indukcyjnego silnika pierścieniowego w podsynchronicznych kaskadach przekształtnikowych |
||
Data: 21.12.2014 |
|
Ćwiczenie nr 19 |
Podpis |
Cel ćwiczenia
Celem ćwiczenia jest wyznaczenie charakterystyk silnika indukcyjnego pierścieniowego w układach kaskadowych.
Schemat pomiarowy
Pomiary wykonano w układzie przedstawionym na Rys.1.
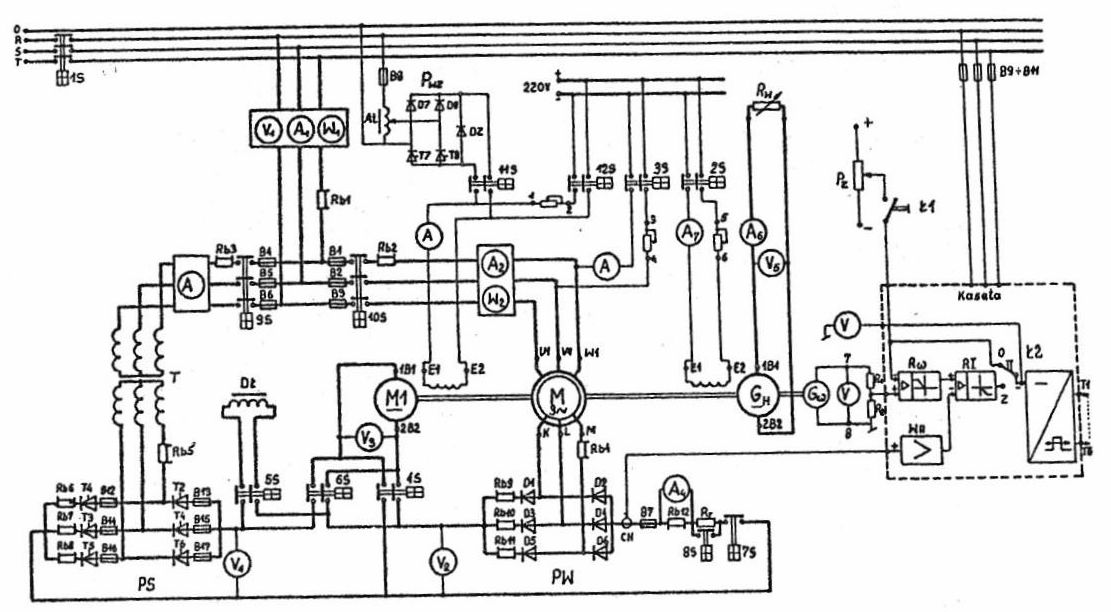
Rys.1. Schemat układu laboratoryjnego do badania asynchronicznych kaskad zaworowych
Dane znamionowe
Silnik pierścieniowy Silnik prądu stałego Prądnica hamowania Transformator
Pn = 4 kW Pn = 7,5 kW Pn = 5,5 kW Sn = 6,6 kVA
Un = 380 V Un = 220 V Un = 220 V U1 = 380 V
In = 8,6 A In = 39,2 A In = 28,8 A I1 = 10 A
nn = 1426 obr/min nn = 1450 obr/min nn = 1450 obr/min U2 = 127 V
En = 103 V Im = 0,93 A Im = 0,714 A IZ = 30 A
Iw = 28 A Yy0
cosφ = 0,82
Wyznaczenie charakterystyk mechanicznych w układzie otwartym i zamkniętym (moment)
Tabela 1. Pomiary i obliczenia charakterystyki mechanicznej dla układu otwartego
|
Pomiary |
Obliczenia |
|||||||||||
|
I1 |
U1 |
P1 |
Uω |
Id |
ItH |
P2 |
ω |
ΔPO |
EH |
PW |
M |
η |
|
A |
V |
W |
V |
A |
A |
W |
rad/s |
W |
V |
W |
N/m |
- |
zamknięty |
11,4 11,4 11,4 11,5 11,5 |
401 401 401 401 401 |
0,65 0,65 0,70 0,70 0,75 |
50,0 55,0 60,0 65,0 70,0 |
20 20 20 20 20 |
13,0 13,0 12,5 12,5 12,0 |
1,05 1,05 1,05 1,05 1,05 |
52,36 57,60 62,83 68,07 73,30 |
41 46 51 56 62 |
75 80 85 87 90 |
1016,0 1086,0 1113,5 1143,5 1142,0 |
19,40 18,85 17,72 16,80 15,58 |
1063,08 1670,80 1590,71 1633,57 1522,67 |
otwarty |
11,5 11,4 10,8 10,0 9,5 8,8 8,0 7,4 7,3 7,0 5,0 |
401 401 401 401 401 401 401 401 401 401 401 |
0,75 0,70 0,65 0,60 0,55 0,50 0,40 0,30 0,25 0,20 0,10 |
70,0 72,5 77,5 80,0 82,5 85,0 90,5 92,5 95,0 100,0 100,0 |
20 19 17 15 12 11 9 8 5 3 2 |
12,0 12,0 11,0 10,0 9,0 7,0 6,0 4,0 3,0 2,0 2,0 |
1,05 1,00 0,90 0,85 0,80 0,65 0,55 0,40 0,30 0,20 0,00 |
73,30 75,92 81,16 83,78 86,39 89,01 94,77 96,87 99,48 104,72 104,72 |
62 65 70 73 77 79 84 88 92 98 98 |
90 92 100 102 105 107 114 117 120 128 128 |
1142,0 1169,0 1170,0 1093,0 1022,0 828,0 786,0 556,0 452,0 354,0 354,0 |
15,58 15,40 14,42 13,05 11,83 9,30 8,29 5,74 4,54 3,38 3,38 |
1522,67 1670,00 1800,00 1821,67 1858,18 1656,00 1965,00 1853,33 1808,00 1770,00 3540,00 |
Przykłady obliczeń:
ω = (2πn)/60 = (2·π·1000)/60 ≈ 104,72 rad/s
PH = EH ∙ ItH = 128 · 2 = 256 W
Pw = PH + ΔPO = 256 + 98 = 354 W
M = Pw/ω = 354/104,72 ≈ 3,38 N/m
η = Pw/P1 = 354/0,1 = 3540
Charakterystyki
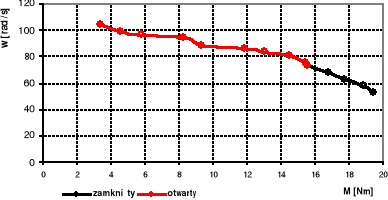
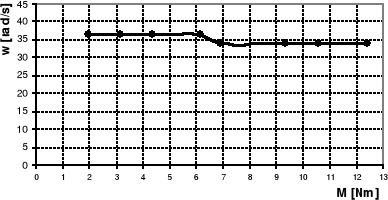
Rys. 1. Charakterystyka mechaniczna ω = f(M) (zależność prędkości kątowej od momentu)
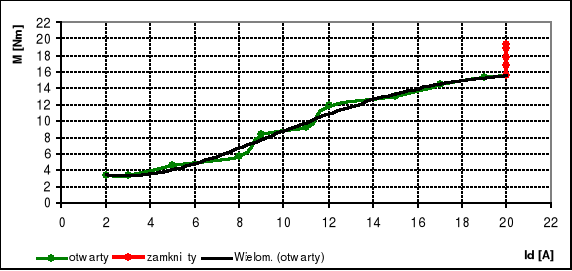
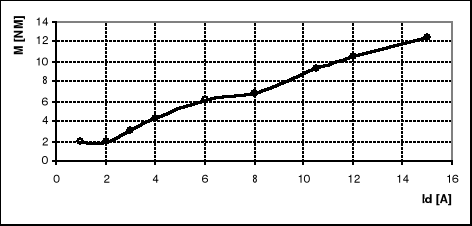
Rys. 2. Charakterystyka M = f(Id) (zależność momentu od prądu w obwodzie stałoprądowym)
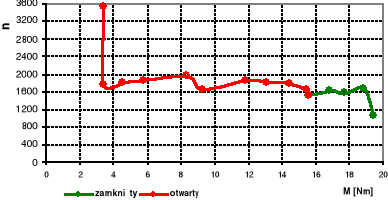
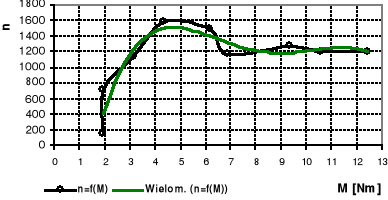
Rys. 3. Charakterystyka η = f(M) (przebieg sprawności w zależności od momentu obciążenia)
Tabela 2. Pomiary i obliczenia charakterystyki mechanicznej dla układu zamkniętego
Pomiary |
Obliczenia |
||||||||||||
I1 |
U1 |
P1 |
Uω |
Id |
ItH |
P2 |
U2 |
ω |
ΔPO |
EH |
PW |
M |
η |
A |
V |
W |
V |
A |
A |
W |
V |
rad/s |
W |
V |
W |
N/m |
- |
9,6 8,8 8,4 7,6 6,8 6,2 6,0 5,8 5,6 |
401 401 401 401 401 401 401 401 401 |
0,35 0,30 0,25 0,20 0,15 0,10 0,10 0,10 0,50 |
32,5 32,5 32,5 32,5 35,0 35,0 35,0 35,0 35,0 |
15,0 12,0 10,5 8,0 6,0 4,0 3,0 2,0 1,0 |
9,5 8,0 7,0 5,0 4,5 3,0 2,0 1,0 1,0 |
0,90 0,70 0,60 0,50 0,35 0,25 0,20 0,15 0,10 |
3,1 3,1 3,1 3,0 2,9 2,9 2,9 2,8 2,8 |
34,03 34,03 34,03 34,03 36,65 36,65 36,65 36,65 36,65 |
24 24 24 24 27 27 27 27 27 |
42 42 42 42 44 44 44 44 44 |
423 360 318 234 225 159 115 71 71 |
12,43 10,58 9,34 6,88 6,14 4,34 3,14 1,94 1,94 |
1208,57 1200,00 1272,00 1170,00 1500,00 1590,00 1150,00 710,00 142,00 |
Przykłady obliczeń:
ω = (2πn)/60 = (2·π·350)/60 ≈ 36,65 rad/s
PH = EH ∙ ItH = 44 · 1 = 44 W
Pw = PH + ΔPO = 44 + 27 = 71 W
M = Pw/ω = 71/36,65 ≈ 1,94 N/m
η = Pw/P1 = 71/0,1 = 710
Charakterystyki
Rys. 4. Charakterystyka mechaniczna ω = f(M)
Rys. 5. Charakterystyka η = f(M)
Rys. 6. Charakterystyka η = f(M)
Wnioski
W celu regulacji prędkości kątowej silników indukcyjnych pierścieniowych obecnie stosuje się powszechnie używane półprzewodnikowe układy z pośredniczącym obwodem prądu stałego, w którym działa napięcie zewnętrzne sterujące prędkością silnika. Obcowzbudna maszyna prądu stałego sprzęgnięta mechanicznie z silnikiem indukcyjnym bądź falownik zależny komutowany przez sieć zasilającą mogą być zewnętrznym źródłem napięcia sterującego. W pierwszej sytuacji jest to układ podsynchronicznej kaskady na stałą moc (P = const), natomiast w drugiej układ podsynchronicznej kaskady przekształtnikowej na stały moment (M = const).
Błędy pomiarów i obliczeń wynikają z niedokładności ludzkiego oka oraz z dokonanych zaokrągleń. W układach kaskady typu M = const, na charakterystyce ω = f(M), zaobserwować można spadek prędkości obrotowej maszyny wraz ze wzrostem momentu obciążeniowego. Analizując otrzymane charakterystyki M = f(Id), stwierdzić można, że posiadają one przebieg bliski liniowemu oraz zauważalne są niewielkie odchylenia. Wraz ze wzrostem momentu rośnie także prąd w obwodzie stałoprądowym. Na otrzymanej charakterystyce η = f(M) (Rys.3.) przy przebiegach sprawności zaobserwować można to, że sprawność maleje wraz ze wzrostem momentu obciążeniowego.
CHARAKTERYSTYKI POWINNY WYGLĄDAĆ INACZEJ, ALE BYŁY TAKIE A NIE INNE POMIARY, DLATEGO NIE MA ODPOWIEDNIEGO WYNIKU
1
Wyszukiwarka
Podobne podstrony:
Regulacja prędkosci katowej obcowzbudnego silnika, Politechnika Lubelska
Regulacja prędkosci katowej obcowzbudnego silnika, Politechnika Lubelska
regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego
ćw.6.Wyznaczanie charakterystyk indukcyjnego silnika pierścieniowego2, Elektrotechnika - notatki, sp
Regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego
regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego
Badanie indukcyjnego silnika pierścieniowego, LABORATORIUM MASZYN ELEKTRYCNYCH
ćw.24.Badanie układu napędowego ze sprzęgłem indukcyjnym, Elektrotechnika - notatki, sprawozdania, N
18k badanie silnika klatkowego zasilanego z przetwornicy częstotliwości, Elektrotechnika - notatki,
Regulacja prędkości kątowej silników indukcyjnych w układach kaskadowych – kaskada stałomomentowax
Regulacja prędkości kątowej silnika asn
Czestotliwosciowa regulacja predkosci katowej silnika indukcyjnego
sila termoelektryczna, Transport i Logistyka (AM) 1 (semestr I), Fizyka, fiza laborki (rozwiązania),
Silnik pierscieniowy
Pomiary parametrów silnika pierścieniowego
Ćw 19
więcej podobnych podstron