Politechnika Lubelska |
Laboratorium Napędu Elektrycznego |
|||
w Lublinie |
Ćwiczenie Nr 20 |
|||
Wykonali: Suwara Piotr, Stec Krzysztof, Smoliński Dariusz, Muszyński Marcin |
Semestr VI |
Grupa ED 6.6 |
Rok akad. 2004/2005 |
|
Temat ćwiczenia: Regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego. |
Data wykonania: 28.02.2005 |
Ocena
|
||
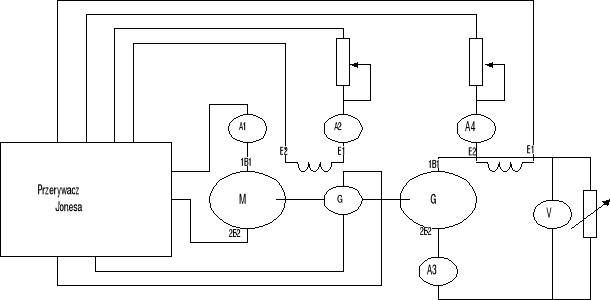
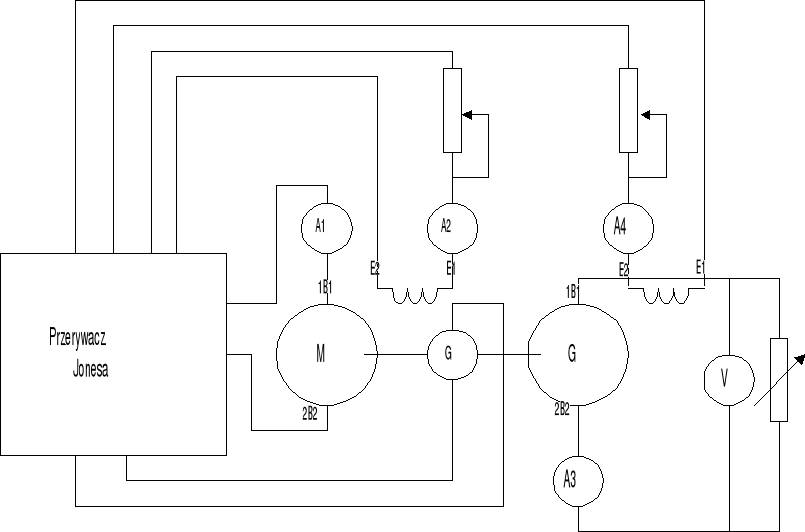
Schemat układu pomiarowego:
Dane znamionowe elementów układu:
Prądnica: Silnik:
IN = 6,25 A IN = 6,25 A
PN = 1,1 kW PN = 1,1 kW
n = 1450 obr/min n = 1450 obr/min
IW = 0,29 A IW = 0,29 A
UN = 220 V UN = 220 V
1.Wyznaczanie charakterystyk mechanicznych silnika obcowzbudnego zasilanego impulsowo.
a) układ otwarty
a = 0.9
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
|
220 |
2,5 |
217 |
1,5 |
0 |
113 |
160 |
167,5 |
0,67 |
2 |
|
220 |
3 |
212 |
2 |
107,5 |
112,4 |
158 |
165,3 |
1,33 |
3 |
|
215 |
3,5 |
210 |
2,5 |
206 |
114,2 |
157 |
164,3 |
1,94 |
4 |
|
215 |
4,2 |
205 |
3 |
301,5 |
117 |
155 |
162,2 |
2,58 |
5 |
6,2 |
210 |
4,7 |
200 |
3,5 |
400 |
121,6 |
154 |
161,1 |
3,23 |
6 |
|
210 |
5,3 |
198 |
4 |
497,5 |
126,7 |
152 |
159 |
3,92 |
7 |
|
210 |
5,9 |
195 |
4,5 |
582 |
134,1 |
151 |
158 |
4,53 |
8 |
|
210 |
6,4 |
192 |
5 |
665 |
142,8 |
150 |
157 |
5,14 |
9 |
|
210 |
7,1 |
187 |
5,5 |
744 |
153,2 |
149 |
155,9 |
5,75 |
10 |
|
208 |
7,8 |
185 |
6 |
828 |
166,3 |
149 |
155,9 |
6,37 |
Przykładowe obliczenia:
PH = IH⋅UH = 205V*3A = 301,5W
ΣΔPH = ΔPo + ΔPobc = 111W+ 1,4W = 112,4
ΔPobc = Ih2⋅RTH = (0,5A)2*5,6Ω = 1,4W
M = [PH+ΣΔPH]/ω = [301,5 + 112,5]/165,3 = 1,33 Nm
a = 0.7
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
|
212 |
2,4 |
221 |
1,5 |
0 |
331,5 |
155 |
165,3 |
0,67 |
2 |
|
210 |
2,9 |
207 |
2 |
105 |
414 |
150 |
162,2 |
1,32 |
3 |
|
210 |
3,6 |
200 |
2,5 |
204 |
500 |
150 |
160,1 |
1,96 |
4 |
|
205 |
4 |
195 |
3 |
301,5 |
585 |
150 |
159 |
2,61 |
5 |
4,5 |
200 |
4,7 |
188 |
3,5 |
398 |
658 |
145 |
157 |
3,28 |
6 |
|
190 |
5,3 |
180 |
4 |
485 |
720 |
140 |
155,9 |
3,9 |
7 |
|
190 |
5,8 |
172 |
4,5 |
570 |
774 |
135 |
154,9 |
4,52 |
8 |
|
185 |
6,4 |
165 |
5 |
654,5 |
825 |
130 |
154,8 |
5,13 |
9 |
|
180 |
7,1 |
157 |
5,5 |
736 |
863,5 |
130 |
152,8 |
5,79 |
10 |
|
178 |
7,7 |
150 |
6 |
810 |
900 |
125 |
151,7 |
6,41 |
a = 0.5
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
|
212 |
0,95 |
210 |
0 |
0 |
108 |
154 |
161,1 |
0,67 |
2 |
|
210 |
1,45 |
202 |
0,5 |
101 |
105,4 |
151 |
158 |
1,3 |
3 |
|
208 |
1,95 |
196 |
1 |
196 |
107,6 |
149 |
155,9 |
1,94 |
4 |
|
204 |
2,45 |
190 |
1,5 |
285 |
108 |
145 |
151,7 |
2,59 |
5 |
3,75 |
198 |
3 |
182 |
2 |
364 |
108,6 |
140 |
146,5 |
3,22 |
6 |
|
190 |
3,45 |
170 |
2,5 |
425 |
109,7 |
133 |
139,2 |
3,84 |
7 |
|
180 |
3,95 |
160 |
3 |
480 |
114,1 |
128 |
133,9 |
4,43 |
8 |
|
175 |
4,45 |
150 |
3,5 |
525 |
116,8 |
120 |
125,6 |
5,1 |
9 |
|
170 |
5 |
142 |
4 |
568 |
126,2 |
118 |
123,5 |
5,62 |
10 |
|
165 |
5,5 |
135 |
4,5 |
607,5 |
134,3 |
112 |
117,2 |
6,33 |
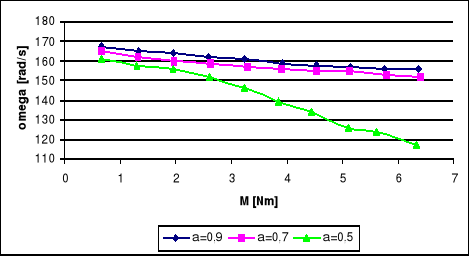
Charakterystyki mechaniczne układu otwartego dla różnych wartości współczynnika „a”
b) układ automatycznej regulacji
Lp |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
4,2 |
210 |
3 |
210 |
2 |
420 |
108,6 |
155 |
158 |
1,97 |
2 |
4,9 |
210 |
3,5 |
205 |
2,5 |
512,5 |
113,6 |
155 |
158 |
2,61 |
3 |
5,6 |
205 |
4,1 |
195 |
3 |
585 |
117,6 |
150 |
157 |
3,24 |
4 |
5,6 |
205 |
4,6 |
195 |
3,5 |
682,5 |
124,7 |
150 |
157 |
3,89 |
5 |
5,6 |
205 |
5,2 |
192 |
4 |
768 |
133,1 |
150 |
157 |
4,55 |
6 |
5,4 |
205 |
5,8 |
190 |
4,5 |
855 |
140,8 |
150 |
154,9 |
5,09 |
7 |
5,3 |
205 |
6,4 |
188 |
5 |
940 |
150,2 |
150 |
151,7 |
5,81 |
8 |
5,5 |
205 |
7,1 |
185 |
5,5 |
1017,5 |
163,3 |
150 |
151,7 |
6,41 |
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
3,2 |
200 |
3 |
192 |
2 |
384 |
103,6 |
145 |
152,8 |
1,92 |
2 |
3,6 |
200 |
3,5 |
190 |
2,5 |
475 |
108 |
145 |
152,8 |
2,58 |
3 |
4 |
195 |
4,1 |
185 |
3 |
555 |
112,6 |
145 |
151,7 |
3,24 |
4 |
4,4 |
190 |
4,6 |
180 |
3,5 |
630 |
119,7 |
140 |
151,7 |
3,88 |
5 |
4,7 |
190 |
5,2 |
176 |
4 |
704 |
128,1 |
140 |
151,7 |
4,5 |
6 |
5,1 |
190 |
5,8 |
175 |
4,5 |
787,5 |
137,8 |
140 |
151,7 |
5,15 |
7 |
4,8 |
190 |
6,4 |
172 |
5 |
860 |
145,2 |
140 |
146,5 |
5,77 |
8 |
4,9 |
190 |
7,1 |
170 |
5,5 |
935 |
157,3 |
140 |
145,4 |
6,31 |
L.p |
US |
UM |
IM |
UH |
IH |
PH |
ΣΔPH |
Uω |
ω |
M |
|
V |
V |
A |
V |
A |
W |
W |
V |
rad/s |
Nm |
1 |
2 |
170 |
2,9 |
165 |
2 |
330 |
88,6 |
115 |
133,9 |
1,91 |
2 |
2,6 |
170 |
3,4 |
163 |
2,5 |
407,5 |
93 |
125 |
133,9 |
2,55 |
3 |
3 |
170 |
4 |
160 |
3 |
480 |
98,6 |
120 |
133,9 |
3,2 |
4 |
3,4 |
165 |
4,6 |
150 |
3,5 |
525 |
105,7 |
120 |
133,9 |
3,83 |
5 |
3,8 |
165 |
5,2 |
148 |
4 |
592 |
114,1 |
115 |
133,9 |
4,43 |
6 |
4,1 |
165 |
5,7 |
145 |
4,5 |
652,5 |
123,8 |
115 |
133,9 |
5,05 |
7 |
4,1 |
165 |
6,4 |
143 |
5 |
715 |
130,2 |
115 |
127,6 |
5,72 |
8 |
4,1 |
165 |
7 |
140 |
5,5 |
770 |
141,3 |
115 |
125,6 |
6,32 |
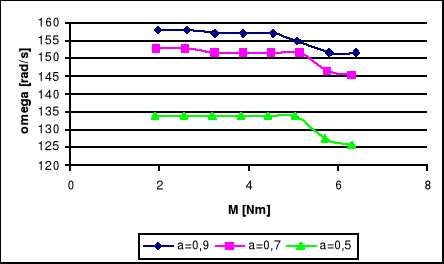
Charakterystyki UAR dla różnych nastaw współczynnika „a”
2.Pomiar charakterystyk regulacyjnych układu napędowego ω = f (a).
L.p |
US |
IM |
Uω |
ω |
a |
|
L.p |
US |
IM |
Uω |
ω |
a |
|
V |
A |
V |
rad/s |
- |
|
|
V |
A |
V |
rad/s |
- |
1 |
0 |
4 |
60 |
71,1 |
0,05 |
|
1 |
0 |
2 |
85 |
86,6 |
0,05 |
2 |
0,5 |
|
68 |
84,7 |
0,2 |
|
2 |
0,5 |
|
100 |
108,4 |
0,2 |
3 |
1 |
|
75 |
104,6 |
0,33 |
|
3 |
1 |
|
110 |
115,4 |
0,33 |
4 |
2 |
|
95 |
130,8 |
0,48 |
|
4 |
2 |
|
128 |
136,2 |
0,48 |
5 |
3 |
|
117 |
151,7 |
0,62 |
|
5 |
3 |
|
150 |
158,5 |
0,62 |
6 |
4 |
|
140 |
157 |
0,76 |
|
6 |
4 |
|
160 |
163,5 |
0,76 |
7 |
5 |
|
160 |
158 |
0,91 |
|
7 |
5 |
|
162 |
165 |
0,91 |
8 |
6, |
|
161 |
160,1 |
0,98 |
|
8 |
6 |
|
165 |
166 |
0,98 |
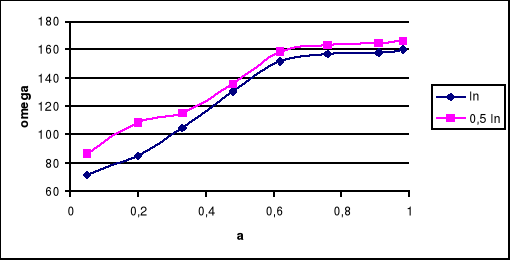
Przebieg charakterystyk regulacyjnych dla prądu IN oraz 0,5 IN.
Wnioski:
Pracę napędu w układzie otwartym badaliśmy przy różnych współczynnikach wypełnienia, możemy stwierdzić że w przypadku gdy „a” jest zbliżony do jedności to praca przebiega stabilnie i zmiany prędkości kątowej w wyniku zwiększania obciążenia są małe w porównaniu ze zmianami prędkości gdy współczynnik przyjmuje wartości niższe (ok. 0,5 i niższe). Praca w układzie automatycznej regulacji przebiega jednakowo stabilnie dla wszystkich nastaw współczynnika wypełnienia, choć obserwujemy w końcowych fazach wszystkich charakterystyk zmniejszenie prędkości podczas wzrostu momentu.
Jak widać z charakterystyk regulacyjnych zwiększanie współczynnika wypełnienia pozwala na wzrost prędkości, w naszym przypadku prędkość była większa dla połowy prądu znamionowego silnika.
Suwara Piotr, Stec Krzysztof, Smoliński Dariusz, Muszyński Marcin.
Wyszukiwarka
Podobne podstrony:
regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego
Regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego
regulacja prędkości kątowej obcowzbudnego silnika prądu stałego za pomocą przerywacza tyrystorowego
Regulacja prędkości kątowej silników indukcyjnych w układach kaskadowych – kaskada stałomomentowax
Regulacja prędkości kątowej silnika asn
Czestotliwosciowa regulacja predkosci katowej silnika indukcyjnego
Sprawdzanie i regulacja licznika jednofazowego energii czynnej, Politechnika Lubelska, Studia, Studi
PROJEKT Z SILNIKÓW I, Politechnika Lubelska, Studia, Studia, organizacja produkcji, laborki-moje, od
Pomiar prędkości łuku prądu stałego, Politechnika Lubelska, Studia, Studia, sem VI, VI-semestr, 07la
9 silnika, Politechnika Lubelska, Studia, Studia, Elektrotechnika - laboratorium, Elektrotechnika -
ćw.19.Reg.prędkości kątowej induk.silnika pierścien.w podsynchr.kaskadachprzekształ, Elektrotechnika
Regulacja predkosci silnika bocznikowego, POLITECHNIKA CZ˙STOCHOWSKA
Regulacia impulsowa 9, Politechnika Lubelska
Wykład 5 Regulacja prędkości obrotowej silników trakcyjnych
więcej podobnych podstron