Rzeszów: 30.01 2001
![]()
Napęd elektryczny
projekt
Temat : Silnik asynchroniczny
pierścieniowy.
WYKONAŁ:
GRZEGORZ KIRC IV EDP. L11
PN = 16 kWUN = 380 V
nN = 718 obr/min
I1N = 42,5
Jspr =3,5 kgm2
λN = 3,0
E20 = 220 V
R2 = 0,118 [V]
Zaprojektoeac nawrotny układ sterowania silnika (bez hamowania ). Rozruch w funkcji prądu . Moment obciążenia silnika MN = MN = const bierny . Dobrać zabiezpieczenia silnika.
moment znamionowy:
MN = 9,55![]()
moment krytyczny
Mkryt = λ * MN = 3 * 212,81 = 638,4 Nm
poślizg znamionowy
![]()
![]()
![]()
![]()
poślizg krytyczny
![]()
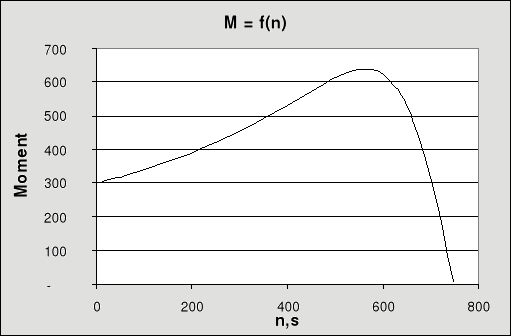
Charakterystyka mechaniczna silnika wyznaczona ze wzorów :
![]()
; 
n [obr/min] |
s = |
M = |
10 |
0,99 |
304 |
25 |
0,97 |
309,51 |
50 |
0,93 |
319,11 |
100 |
0,87 |
340,02 |
150 |
0,80 |
363,50 |
200 |
0,73 |
389,95 |
250 |
0,67 |
419,77 |
300 |
0,60 |
453,30 |
350 |
0,53 |
490,68 |
400 |
0,47 |
531,47 |
450 |
0,40 |
573,84 |
500 |
0,33 |
612,86 |
550 |
0,27 |
637,07 |
600 |
0,20 |
622,83 |
650 |
0,13 |
530,16 |
700 |
0,07 |
317,88 |
749 |
0,00 |
6,81 |

Charakterystyka mechaniczna silnika.
I2N = υ ∙ I1N ![]()
;
υ = ![]()
Zakładam , że rozruch będzie odbywał się dla : I2r max = 2 ∙ I2N , I2r min = 1,1 ∙ I2N
Silnik obciążony momentem mechanicznym zmieniającym się liniowo . (dla n=0 , Mm=0
dla n=nN , Mm=MN )

log I2r min = - log I2r max = - 0,266
log I2r min = - 0,266 + log I2r max
log I2r max = 2 ∙ I2N = 2 ∙ 73,4 = 146,8 [A]
log I2r min = - 0,266 + log(146,8) = 1,9
I2r min = 101,9 = 79,56 A
I2r min = 1,084 ∙ I2N = 1,084 . 73,4 = 79,56 [A] I2r max = 2 ∙ I2N = 2 ∙73,4 = 146,8 [a]
Mmin = 1,084 ∙ MN = 1,084 . 212,81 =230,69[A} Mmax = 2 ∙ MN =2 . 212,81 =425,61
s1 = ![]()
→ n1 = n0 (1- s1) = 750 (1- 0,542) = 344,25 obr / min
s2 = s12 = 0,294 → n2 = n0 (1- s2) = 750 (1- 0,294) = 529,5 obr / min s3 = s13 = 0,159 → n3 = n0 (1- s3) = 750 (1- 0,159) = 630,75 obr / min
s4 = s14 = 0,086 → n4 = n0 (1- s4) = 750 (1- 0,086) = 685,5 obr / min
Charakterystyka n =f (M) z włączonymi dodatkowymi rezystorami w obwód wirnika silnika pierścieniowego.
WR
Tr
1 R 1 S 1 T
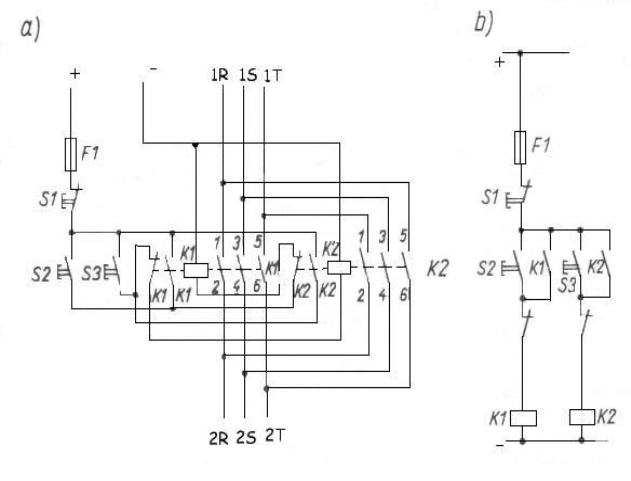
Stycznikowy przełącznik lewo/prawo
2R 2S 2T
SL
W Z PT SL
SL
SL 1PR 1SR 4SR
1SR 2PR 2SR
4SR 4SR
Rd Rd1 Rd1
2SR 3PR 3SR
3SR 3SR
Rd2 Rd2 Rd2 3SR 4PR 4SR
2SR 2SR
Rd3 Rd3 Rd3 4SR
1SR 1SR
Rd4 Rd4 Rd4
Rd2 = ( Rd1 + R2 ) ∙ s1 - R2 = (![]()
+ 0,118) ∙ 0,542 - 0,118 = 0,349 ![]()
Rd3 = ( Rd1 + R2 ) ∙ s2 - R2 = (![]()
+ 0,118 ) ∙ 0,294 - 0,118 = 0,135 ![]()
Rd4 = ( Rd1 + R2 ) ∙ s3 - R2 = (![]()
+ 0,118 ) ∙ 0,159 - 0,118 = 0,019 ![]()
Rd = Rd1 + Rd2 + Rd3 + Rd4 = 0,744 + 0,349 + 0,135 + 0,019 = 1,237 ![]()
Mr = 
[Nm]
Przyjmuję : J = 3,5 kg ∙ m2
MN = 9,55![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
tc - czas całkowitego rozruchu:
tc= ![]()
+ tr2 + tr3 + tr4
tc= 0,52 + 0,49 + 0,31 + 0,2 = 1,52[s]
Dla kolejnych stopni rozruchowych korzystam z następujących zależności w których pominąłem reaktancje obwodu wirnika jako małe w porównaniu z sumaryczną rezystancją .
IRr = ![]()
; IRp = ![]()
;
1.) IRr1 = ![]()
= ![]()
=177.8 [A] IRp1 = ![]()
= ![]()
= 96.39 [A]
Rd = 1.237[Ω]
IRr2 =

=
= 97.89 [A]; IRp2 =
=
= 53.10 [A]
RD2 = Rd - Rd4 = 1.237 - 0.019 = 1.218 [Ω]
3.) IRr3 =![]()
=![]()
= 59.72 [A]; IRp3 = ![]()
= ![]()
= 32.29 [A]
RD3 = RD2 - Rd3 =1.218 - 0.135 = 1.08 [Ω]
4.) IRr4 =![]()
=![]()
= 47.85 [A]; IRp4 = ![]()
= ![]()
= 25.9 [A]
RD4 = RD3 - Rd3 =1.08 - 0.349 = 1.08 [Ω]
Dobór zabezpieczeń.
Do zabezpieczeń silnika pierścieniowego zaliczyć możemy:
Zabezpieczenie przeciwzwarciowe.
Zabezpieczenie przeciążeniowe.
Zabezpieczenie przed zanikiem napięcia.
Zabezpieczenie przeciwzwarciowe stanowi bezpiecznik wielkiej mocy o ch-tyce zwłocznej na prąd znamionowy 130 A(co wynika z zależności Iz= I1n.λ = 42,5 . 3 ≈ 130A).
Zabezpieczenie przeciążeniowe zgodnie z polską normą PN-58/E-05012 stanowi wyzwalacz termiczny nastawiony na prąd 100 A.
Zabezpieczenie przed zanikiem napięcia jest realizowane poprzez układ przekaźników.
1.) Do zabezpieczenia silnika zastosować możemy także wyłącznik silnikowy M 250. Posiada on w sobie wszystkie potrzebne zabezpieczenia, oraz gwarantuje niezawodną pracę silnika.
2.) Jak również zastosować możemy wyłącznik silnikowy GV3 M63 z nastawialnym prądem rozruchu.
Literatura:
1. „Teoria napędu elektrycznego” - S.Bielewski, W-wa 1978
2. „Napęd elektryczny” wyd. 5 - Z.Gogolewski, Z..Kuczewski, W-wa 1972
3. „Maszyny i napęd elektryczny” - H.Kowalewski, W-wa 1983
4. „Dynamika maszyn i układów elektromechanicznych” - A.Puchała
5. „Napęd elektryczny” - praca zbiorowa pod kierunkiem Z.Grunwalda, W-wa 1987
6. „Automatyka napędu elektrycznego” - J.Siwiński, W-wa 1960
7. „Silniki elektryczne małej mocy” - P.Puternicki, W-wa 1975
8. „Zbiór zadań z napędu elektrycznego” - Z.Kuczewski, W-wa 1986
9 „Instalacje elektryczne” - H.Markiewicz, W-wa 1996
10.”Automatyka napedu „ - Bisztyga
11. Zabezpieczenia dobrałem na podstawie katalogów FAEL i SCHNEIDER. 2001r.
4PR
3PR
1PR
2PR
Obliczam poślizg na poszczególnych stopniach rozruchowych oraz odpowiadające im prędkości :
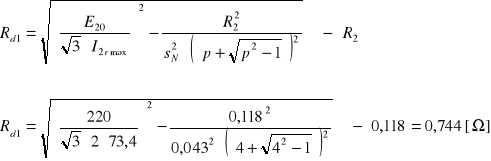
Obliczam rezystancję dodatkową na pierwszym stopniu rozruchowym :
Obliczam rezystancje dodatkowe na pozostałych stopniach rozruchowych :
Obliczam czasy rozruchu :
I stopień rozruchu
I I stopień rozruchu
I I I stopień rozruchu
I V stopień rozruchu
Dobór rozrusznika i wyznaczenie czasu rozruchu :
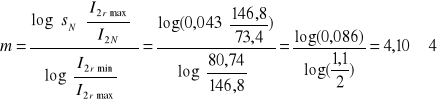
Obliczam liczbę stopni rozruchowych :
M1 M2
I1min I2max
RD4
RD3
RD2
Charakterystyka mechaniczna silnika:
Obliczam moment rozruchu :
Silnik asynchroniczny pierścieniowy o danych :
Rd
n0
n4
n3
n2
n1
IV
III
II
I
M
I>
I>
I>
V. Dobieram prąd rozruchu IRr oraz prąd IRp Irpprzełączania
Wyszukiwarka
Podobne podstrony:
napęd elekt nr20, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekt
naped teoria, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekty od
napęd elektry proj, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, proje
napęd elektry nr9, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projek
mój projekt----kkk, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, proje
silnika- projekt, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekt
Napęd ster2], Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekty
Napęd elektr. proj, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, proje
naped-proj, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekty od D
Silnik obcowzbudny S1 0 mocy PN, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projek
Projekt z silników szeregowych1, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projek
PROJEKTteor, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekty od
Projekt ener, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekty od
Napęd- Danusia, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekty
szer prąd stał, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekty
napęd elektry pro2, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, proje
Projekt Mój teoretyczny, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got,
więcej podobnych podstron