9. REGULACJA DWUPOŁOŻENIOWA
Regulacja dwupołożeniowa jest jedną z najprostszych. Jest to ten typ regulacji, z którym spotykamy się np. w termostatach i lodówkach.
W układach regulacji tego typu zadania regulatora spełnia przekaźnik dwupołożeniowy, za pośrednictwem którego następuje załączanie lub wyłączanie odpowiedniego obwodu w obiekcie regulowanym (np. włączenie lub wyłączenie grzejnika w termostacie). Taki sposób działania regulatora powoduje stałe periodyczne wahania wielkości regulowanej. W praktyce przemysłowej regulację dwupołożeniową stosuje się najczęściej w układach automatycznej regulacji temperatury. Nie jest to jednak bynajmniej jedyna domena zastosowania tego typu regulacji. Regulacja dwupołożeniowa znajduje np. również zastosowanie w układach automatycznej regulacji napięcia generatorów elektrycznych (przekaźniki Tirrilla) lub kąta skręcenia rakiet (spoilery).
9.1. Przekaźniki dwupołożeniowe
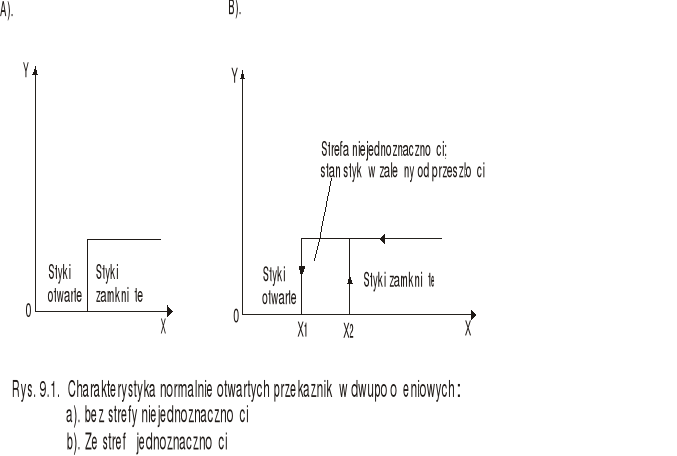
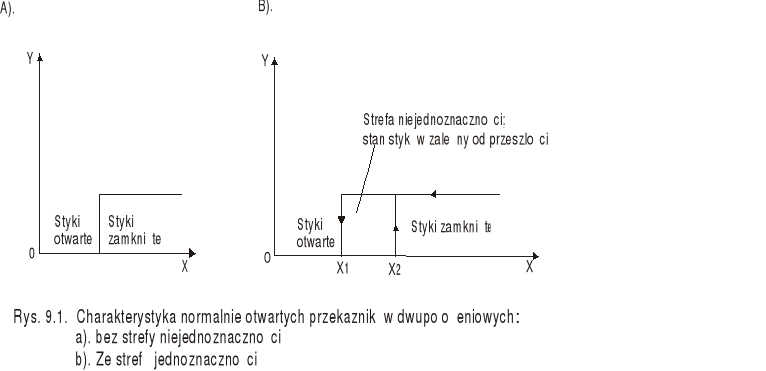
Istotną cechą przekaźnika dwupołożeniowego jest to, że przez zmianę sygnału wejściowego można powodować zamykanie lub otwieranie jego styków, a przez to obwodu, do którego zostały dołączone. Jeżeli zerowemu sygnałowi wejściowemu odpowiada stan otwarcia styków, to taki przekaźnik nazywamy normalnie otwartym. Jeżeli zerowemu sygnałowi wejściowemu odpowiada stan zamknięcia styków, to taki przekaźnik nazywamy normalnie zamkniętym.
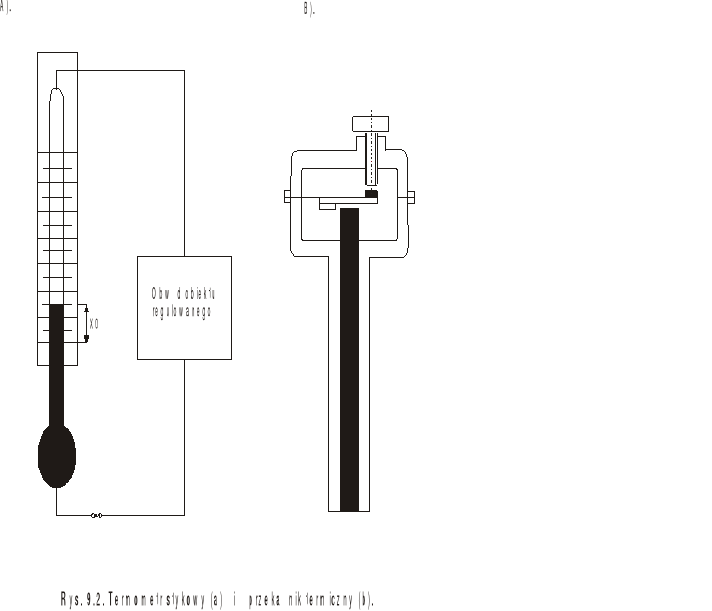
Przykłady konstrukcji przekaźników przedstawione są na rys. 9.2, 9.3 i 9.4.
Na rysunku 9.2a pokazana jest zasada konstrukcji termometru stykowego.
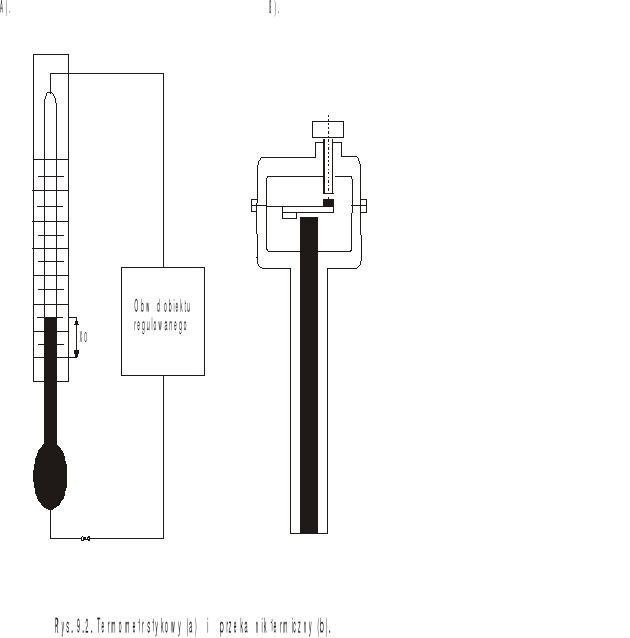
Na rysunku 9.2b pokazano konstrukcję przekaźnika termicznego.
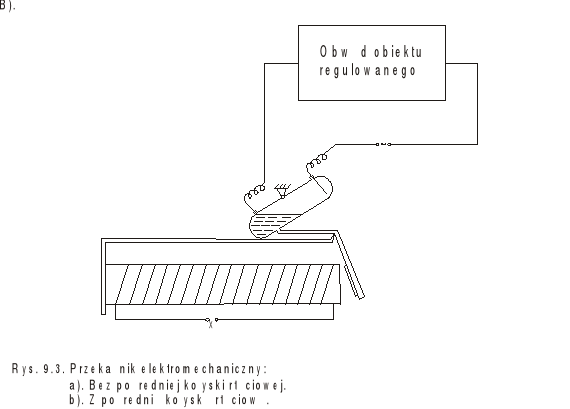
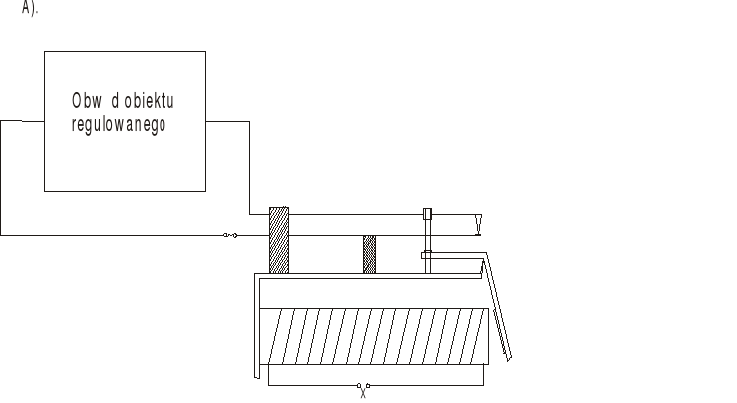
Na rysunku 9.3 pokazane są przekaźniki elektromechaniczne.
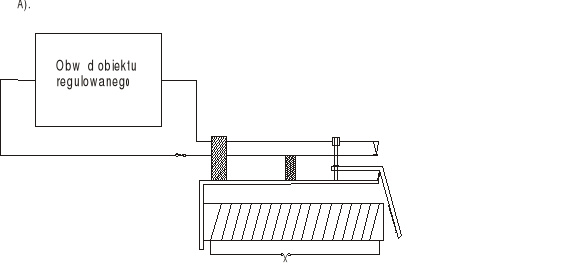
Jeżeli przekaźnik ma wyłączać prąd o dużym natężeniu, to zamiast elektrod stykowych umieszcza się pośredniczącą kołyskę rtęciową, jak to pokazano na rys. 9.3b.
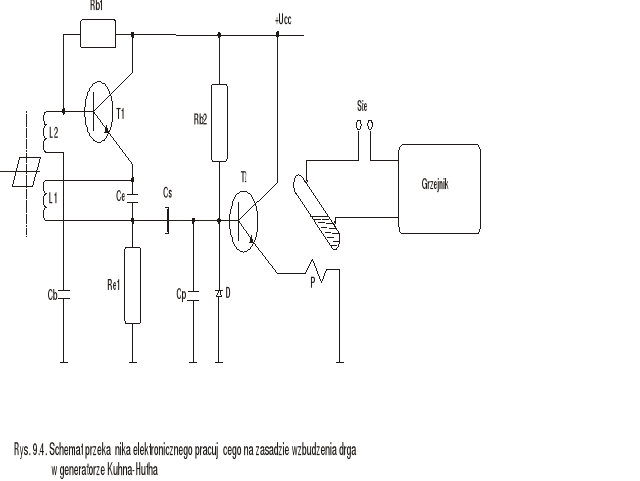
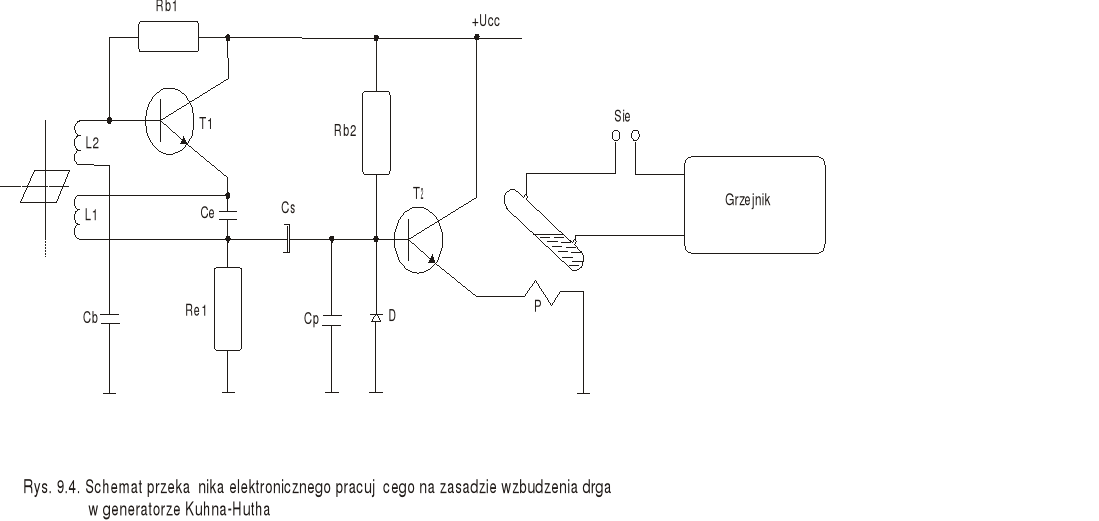
Na rysunku 9.4 pokazany jest schemat przekaźnika elektronicznego pracującego na zasadzie wzbudzenia drgań w generatorze Kuhna-Hutha. Parametry obwodów rezonansowych są tak dobrane, że drgania wielkiej częstotliwości powstają tylko wtedy, kiedy blaszka umieszczona na końcu wskazówki miernika znajduje się poza szczeliną, między dwiema cewkami L1 i L2. Położenie wskazówki zależy od napięcia x załączonego na miernik elektromagnetyczny.
9.2. Prosty układ regulacji dwupołożeniowej
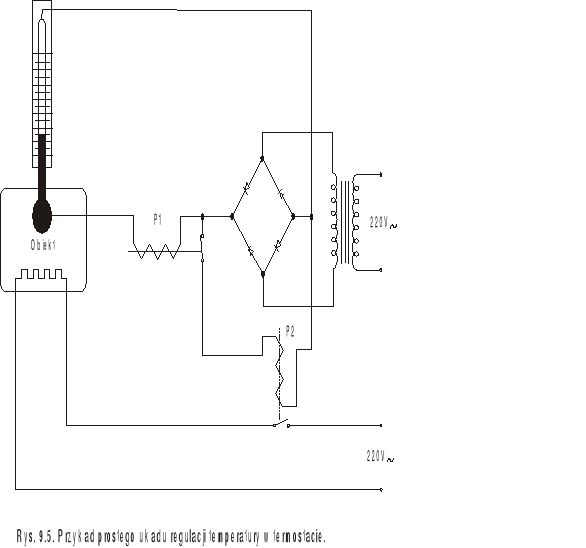
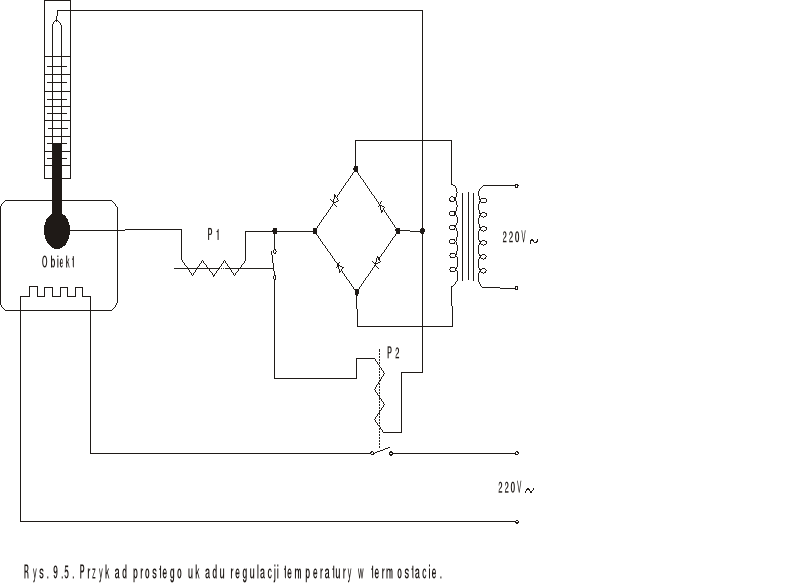
Przykład prostego układu regulacji dwupołożeniowej przedstawiony jest na rys. 9.5. Jest to układ automatycznej regulacji temperatury termostatu. Jako regulatora użyto termometru stykowego. Ponieważ elektrody takiego termometru są zbyt delikatne, aby wyłączyć prąd obwodu grzejnego, zastosowano dwa przekaźniki pośredniczące P1 i P2. Działanie tego układu regulacji polega na tym, że gdy temperatura regulowanego obiektu przekroczy zadaną wartość, wówczas zostaje zwarty obwód cewki przekaźnika P1 .Jego normalnie zamknięty styk przerywa obwód sterujący przekaźnika P2 i powoduje wyłączenie grzejnika. Gdy temperatura obiektu opadnie poniżej wartości zadanej, wówczas powstaje przerwa między drucikiem a słupkiem rtęci termometru stykowego. Obwód przekaźnika P1 zostaje otwarty, jego normalnie zamknięty styk zwiera więc obwód sterujący przekaźnika P2 i powoduje ponowne załączenie grzejnika.
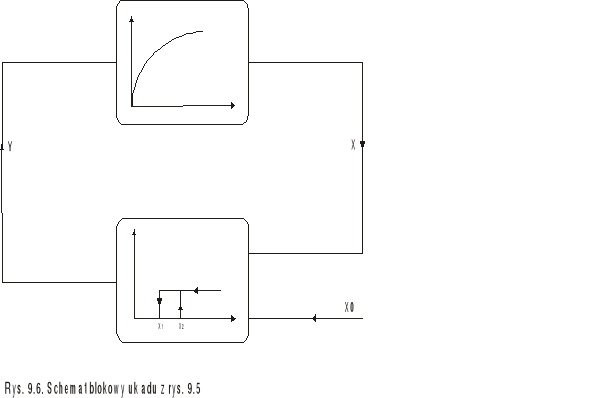
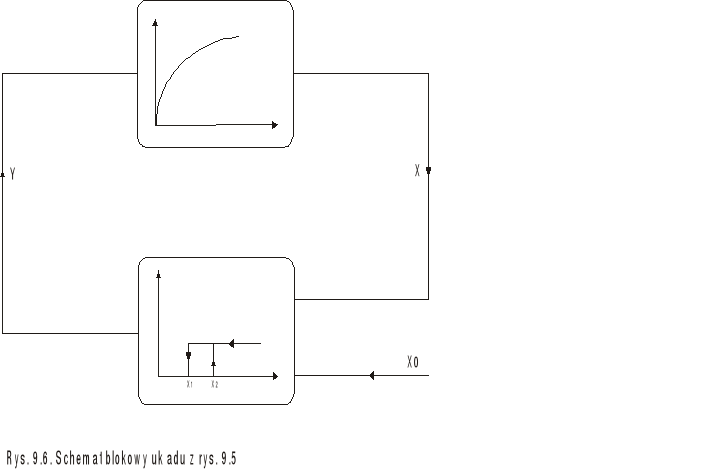
Jeżeli przyjmiemy, że dany termostat można z dobrym przybliżeniem traktować jak obiekt inercyjny pierwszego rzędu i że jego stała czasowa jest dużo większa od stałych czasowych przekaźników, to można wówczas dla układu z rys. 9.5 przyjąć schemat blokowy przedstawiony na rys. 9.6.
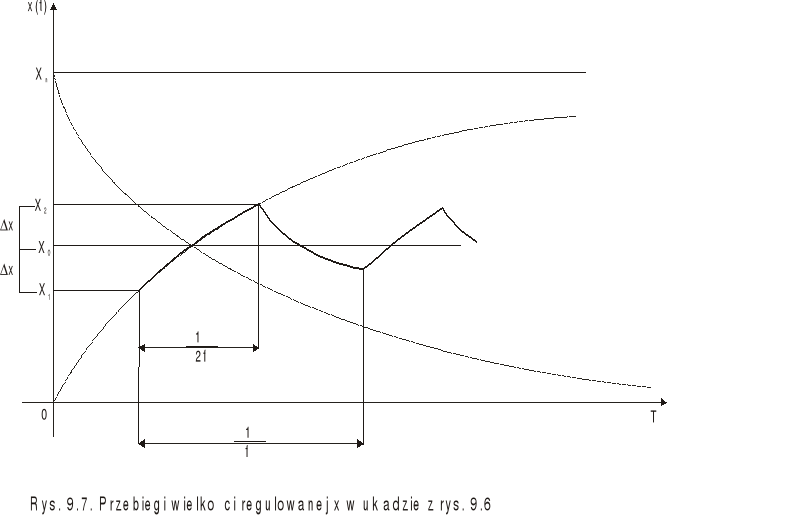
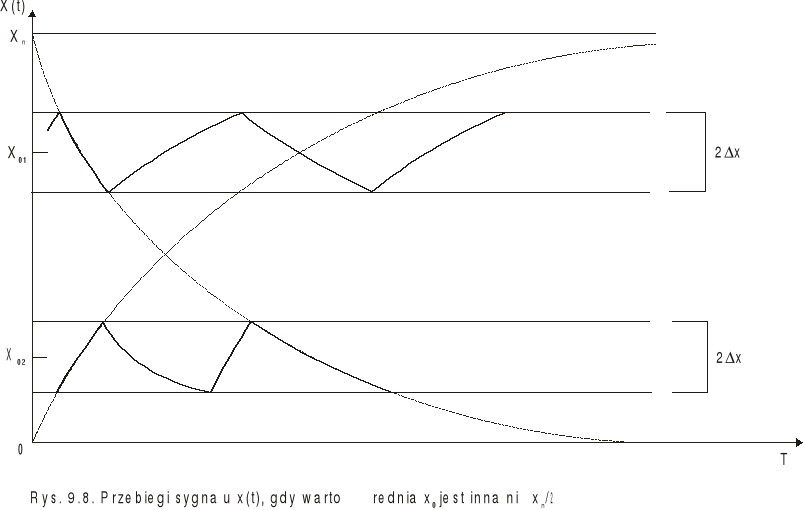
Przebiegi wielkości regulowanej x, jakie będą miały miejsce w takim układzie dla różnych wartości sygnału x0, przedstawiono na rys. 9.7. Przyjmiemy następujące oznaczenia:
xn — maksymalna wartość sygnału regulowanego x, którą osiągnąłby,
gdyby obiekt nie został wyłączony,
x0 — wartość średnia funkcji x(t),
x1, x2 — wartości określające strefę niejednoznaczności przekaźnika
według rys. 9.1,
T — stała czasowa obiektu,
f - częstość załączeń.
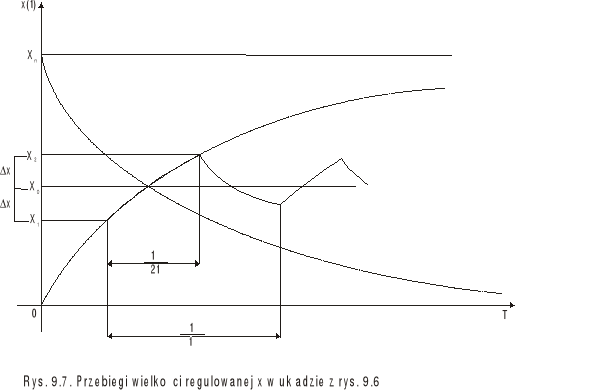
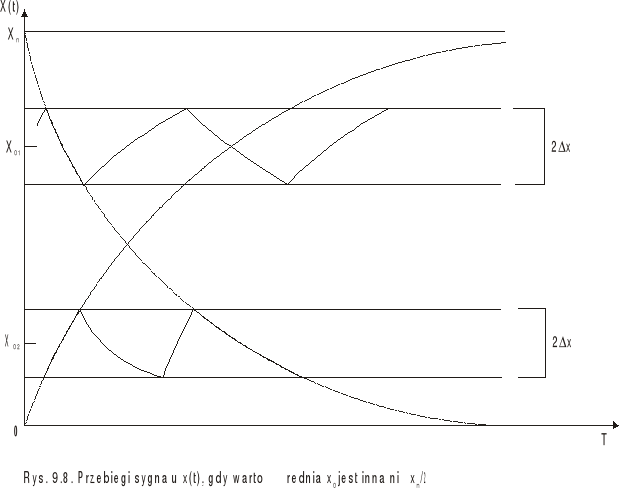
Dla ułatwienia obliczeń przyjmiemy, że
xn = 2x0, czyli że średnia wartość sygnału x nastawiona została na połowę jego wartości maksymalnej x.
Oznaczymy
![]()
z transformaty Laplace'a
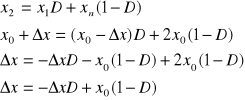
stąd ![]()
Uwzględniając, że D = e-1/2fT , otrzymamy 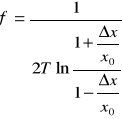
(9.1) Mając więc dane obiektu i regulatora możemy na podstawie wzoru (9.1) obliczyć częstość załączeń.
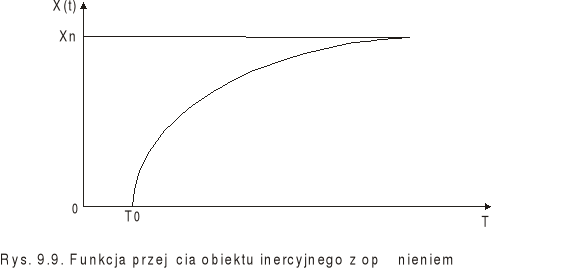
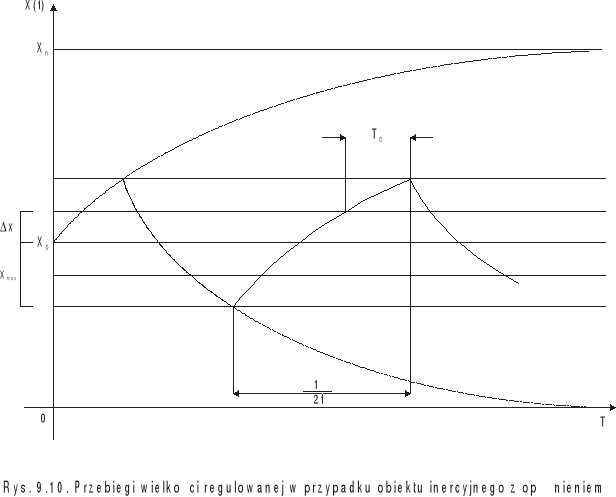
9.3. Dwupołożeniowa regulacja obiektu inercyjnego z czasem opóźnienia
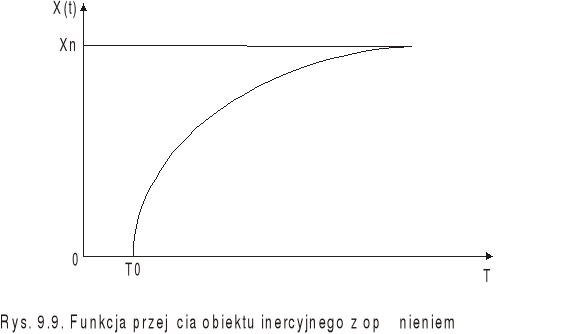
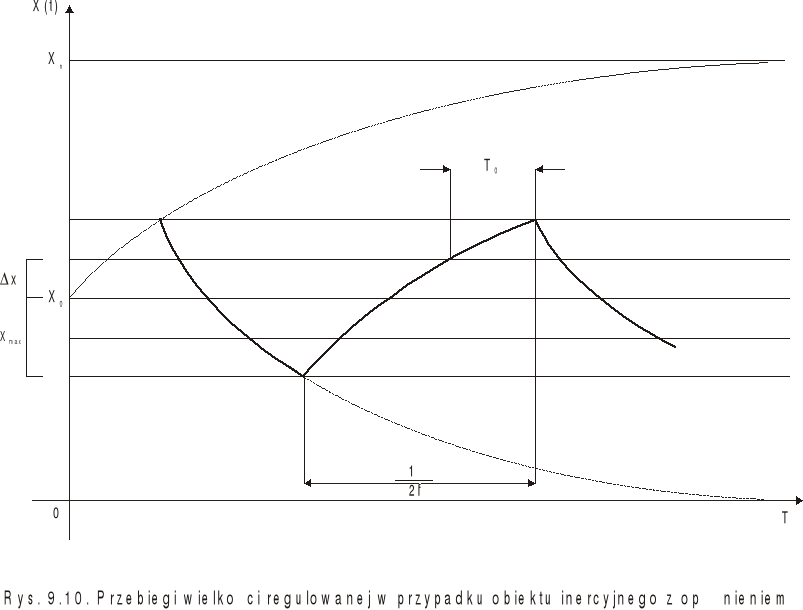
Przyjmiemy obecnie, że obiekt jest elementem inercyjnym pierwszego rzędu z opóźnieniem i ma funkcję przejścia o przebiegu pokazanym na rys. 9.9. Przebieg wielkości regulowanej x, przy identycznym jak poprzednio założeniu upraszczającym x0 = xn/2, jest pokazany na rys. 9.10. Na podstawie przyjętych założeń i rys. 9.10 mamy
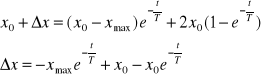
![]()
(9.2)
oraz
![]()
(9.3)
Oznaczając
![]()
, ![]()
możemy równania (9.2) i (9.3) napisać w postaci
Δx = -xmaxDB-1-x0 (1 - DB-1) (9.4)
xmax = -xmaxD + x0 (1-D) (9.5)
Po rozwiązaniu tych równań otrzymujemy:
![]()
(9.6)
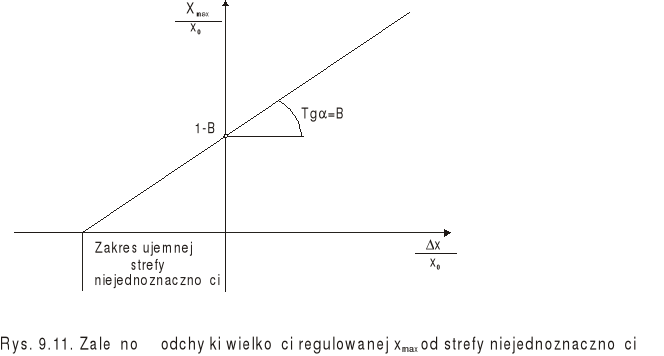
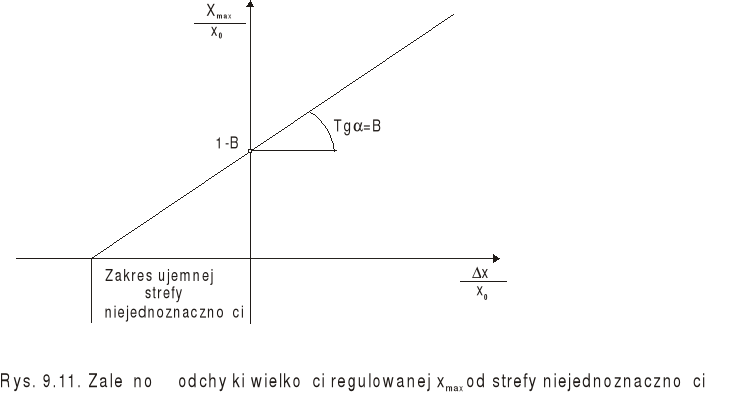
Równanie (9.6) podaje zależność między odchyłką xmax wielkości regulowanej x od zadanej wartości średniej x0 a strefą nieczułości Δx regulatora. Jest to równanie prostej o przebiegu pokazanym na rys. 9.11.
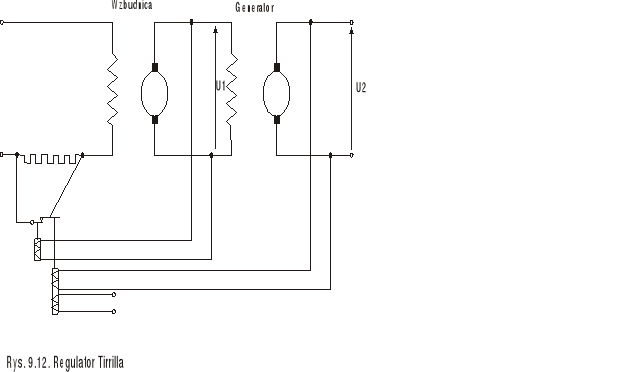
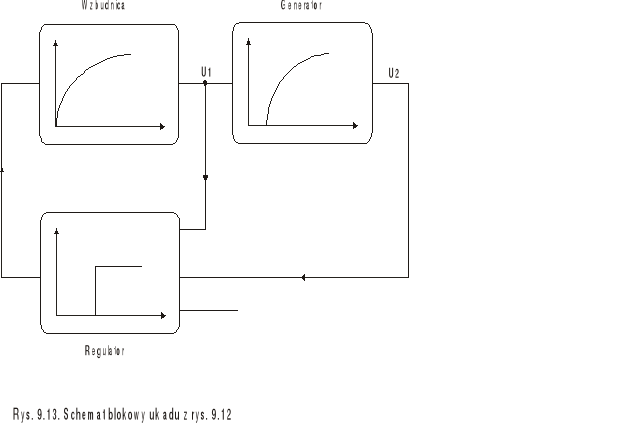
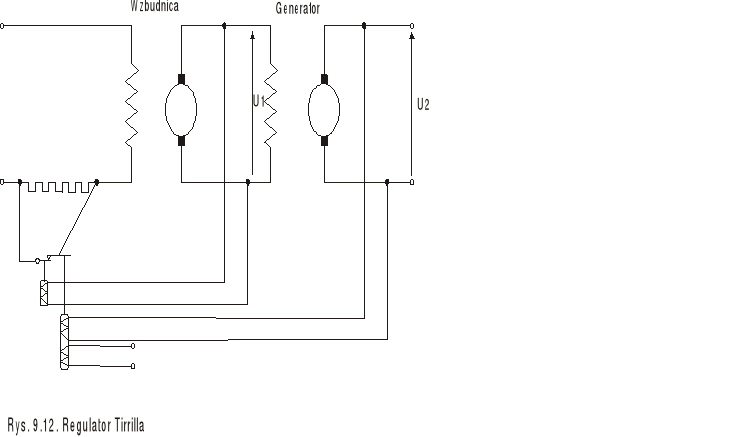
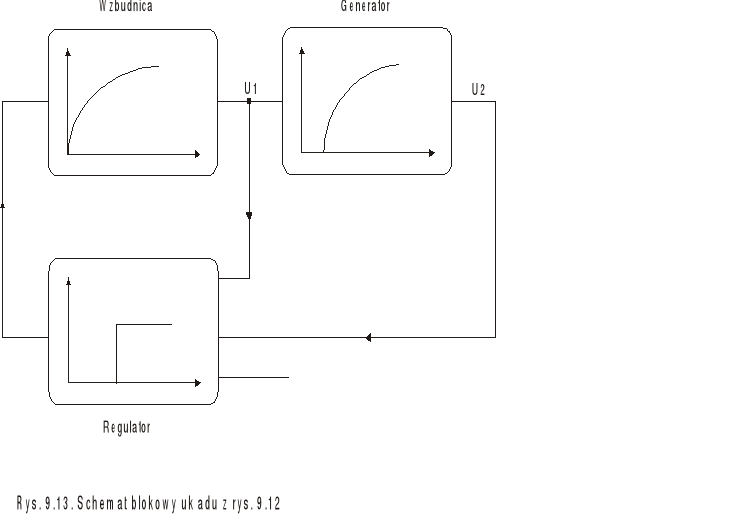
Przykładem praktycznej realizacji takiej ujemnej strefy niejednoznaczności może być układ regulacji napięcia generatora prądu stałego za pomocą znanego regulatora Tirrilla (rys. 9.12). Obwód regulacyjny obejmuje w tym przypadku generator i wzbudnicę, jak to pokazano na schemacie blokowym, przedstawionym na rys. 9.13.

Wyszukiwarka
Podobne podstrony:
Regulacja trojpolozeniowa, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Mechanizm strugarki, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Metoda toru ocechowanego, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Tensor bezwladnosci, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Analiza komputerowa mech tloko, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Analiza strukturalna mechanizmow, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Przekazniki, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Przekazniki trojpolozeniowe, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Mechanizm strugarki, Księgozbiór, Studia, Maszynoznastwo i Automatyka
regulamin rekrutacji, Księgozbiór, Studia, Pozostałe
regulamin uczestnictwa, Księgozbiór, Studia, Pozostałe
Podstawy Automatyki Lab 2014 CW3 Badania regulatora dwupołożeniowego
NGO2011 regulamin, Księgozbiór, Studia, Pozostałe
Regulatory przem, Studia, mechatronika, automatyka
Analiza nieliniowego układu automatycznej regulacji - dwupołożeniowa regulacja temperatury(1) , Cel
Maszyny do obrobki plastycznej, Księgozbiór, Studia, LOOS
Maszyny technologiczne sterowane numerycznie, Księgozbiór, Studia, LOOS
więcej podobnych podstron