Dane techniczne:
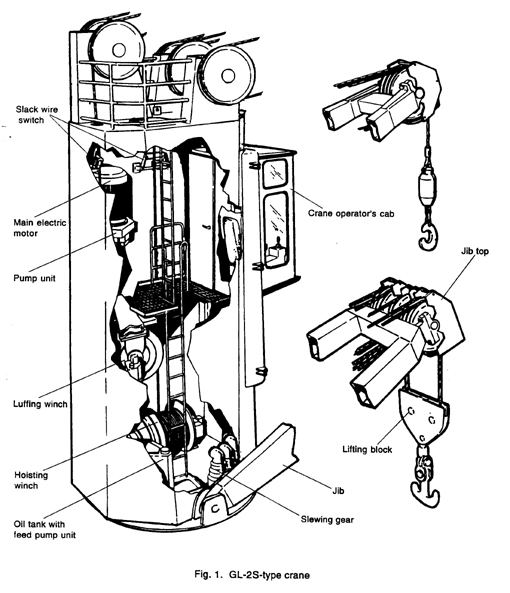
Typ żurawia GL4027-2S
Waga 47 ton
Rodzaj prądu 3~60Hz
Napięcie zasilania 440V
Napięcie sterowania 220V
Promień wysięgnika max 27 m., min 3,3 m.
Wysokość podnoszenia max 28 m., min 10 m.
Dopuszczalny udżwig 40 ton
Prędkość podnoszenia ( 0 do 16 ton ) 44 m/min
Prędkość podnoszenia ( 0 do 40 ton ) 22 m/min
Czas podnoszenia od max do min promienia wysięgnika 57 sec
Prędkość obrotu żurawia 0,7 obr/min
Dane techniczne silnika elektrycznego:
Rodzaj prądu 3~60Hz
Obciążenie stałe 150 kW
Obciążenie typu S6 225 kW
Prędkość obrotowa 1785 obr/min
Napięcie zasilania 440 V
Prąd rozruchowy 560 A
Dane techniczne przekładni:
Przełożenie i=0,692
Prędkość obrotowa przekładni 2580 obr/min
Dane hydrauliczne:
Obwód windy podnoszącej ładunek
Objętość skokowa 125 cm3
Teoretyczna chłonność silnika 33800 cm3/obr
b) Obwód windy wychylającej wysięgnik
Objętość skokowa 125 cm3
Teoretyczna chłonność silnika 11100 cm3/obr
c) Obwód windy obracającej
Objętość skokowa 125 cm3
Teoretyczna chłonność silnika 59,8 cm3/obr
Dane techniczne obwodu zasilania i sterowania:
Chłonność silnika 49,1 cm3/obr
Rodzaj prądu 3~60Hz
Zapotrzebowanie mocy ( 2 bieguny ) 20 kW
Zapotrzebowanie mocy ( 4 bieguny ) 13 kW
Prędkość obrotowa ( 2 bieguny ) 3360 obr/min
Prędkość obrotowa ( 4 bieguny ) 1680 obr/min
Prąd rozruchowy (2 bieguny ) 141 A
Prąd rozruchowy ( 4 bieguny ) 107 A
Zbiorniki olejowe:
Objętość głównego zbiornika olejowego 500 litrów
Objętość karteru przekładni 13,5 litra
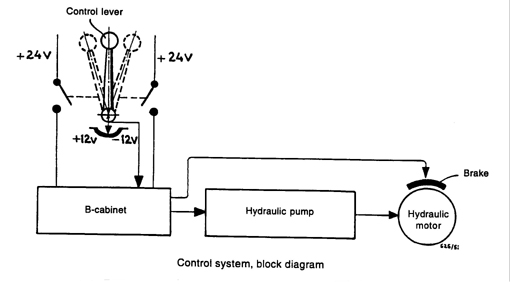
Ogólna charakterystyka systemu sterowania.
System ten jest oparty na dwóch dzwigniach sterujących, które znajdują się w kabinie operatora, oraz skrzynki elektronicznej znajdującej się w obudowie. Prawa dzwignia steruje obwodem podnoszenia i opuszczania ładunku natomiast lewa dzwignia steruje obwodem podnoszenia i opuszczania wysięgnika dżwigu oraz obrotu całego dzwigu ładunkowego.
Wszystkie ruchy dzwigu ładunkowego łącznie z obwodem podnoszenia i opuszczania ładunku są realizowane przez silniki hydrauliczne.
Potencjometr liniowy dżwigni sterującej jest zasilany+/-12V.sygnał wyjściowy z potencjometru wynosi 0V,wtedy gdy dżwignia jest w położeniu neutralnym. Sygnał wyjściowy jest sterowany i może wynosić od -10 do +10V w zależności od ruchu dżwigni. Sygnał ten jest podawany do szafki sterującej, gdzie zamieniany jest w przetworniku napięcie/natężenie i dalej do sterowania cewką pompy hydraulicznej oraz do obwodu logicznego zwalniaka hamulca.
Opisy poszczególnych systemów.
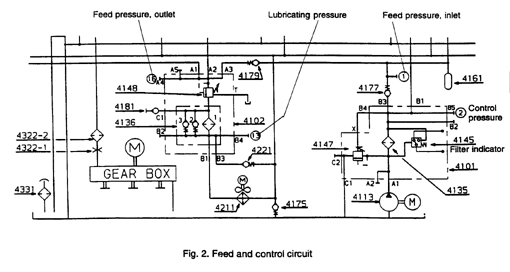
1.System zasilania i sterowania.
a).System zasilania
Głównym zadaniem tego obwodu jest uzupełnianie przecieków ciepłego hydrolu oraz jednocześnie poprzez tę wymianę uzyskuje się obniżenie temperatury hydrolu w obiegu głównym
Zasilanie jest przeprowadzone poprzez zawór zwrotny na stronę systemu niskiego ciśnienia. Obwód ten pracuje przy ciśnieniu 1.9-2.5Mpa, które jest nastawiane na zaworze 4148 i mierzone jest w punkcie 1.
b)System sterowania
Zadaniem tego systemu jest dostarczenie hydrolu zarówno do hamulców i serwomotorów pomp jak również do sterowania prędkością wind, prędkością obrotu dżwigu oraz kierunku pracy.System pracuje przy ciśnieniu 3-3.3Mpa i jest mierzony w punkcie 2. Czynnik sterujący jest dostarczany do serwomotorów pomp przez serwozawory.
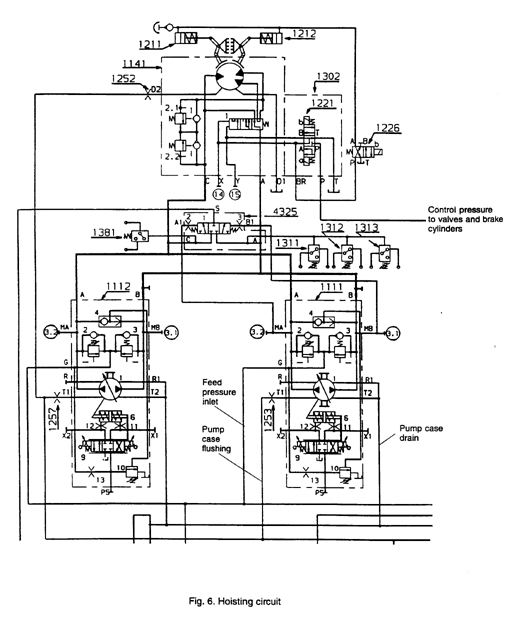
2.Obwód podnoszenia i opuszczania ciężaru.
1111,1112-pompy
1141-silnik hydrauliczny
1141.1-zawór silnika
1211,1212-cylindry hamulców
Zawór silnika 1141.1 jest zamontowany na silniku hydraulicznym. Cylindry hamulców znajdują się na wspornikach łożyska silnika.
Działanie:
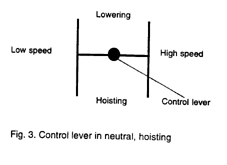
Jeżeli dżwignia znajduję się w pozycji neutralnej oraz pompy działają obwód podnoszenia nie spełnia swojej roli. Ciagłe dostarczanie oleju z obiegu zasilania uzupełnia straty oleju z obiegu podnoszenia
Zakres małych prędkości i zwolnienie hamulca.
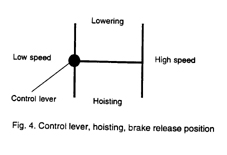
Kiedy dzwignia sterująca jest pchnięta w lewą stronę na małą prędkość działania, zawór 1221 przesteruje się w swoje górne położenie oraz zawór 1226 jest zasilany. Dzięki temu całe ciśnienie sterowania jest skierowane do cylindrów hamulców 1211 i 1212, które zwalniają hamulce, oraz do zaworu silnika 1141.1, który przesterowuje się ze swojego położenia odpowietrzającego do położenia dzięki któremu następuje całkowite połączenie cylindrów silnika hydraulicznego (otrzymujemy wtedy mała prędkość).
Kiedy nie mamy ładunku na haku oraz gdy dżwignia znajduje się jak na rys.4 winda obwodu podnoszenia ładunku powinna powoli podnosić się.
Zakres dużych prędkości, zwolnienie hamulca:
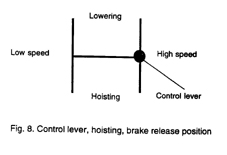
Poruszając dżwignie w prawo od pozycji neutralnej spowodujemy przesunięcie się zaworu w jego dolne położenie. Zawór 1226 jest zasilany. Zawór silnika 1141.1 zajmuje pozycję „dużych prędkości” a hamulce są zwalniane. Cała wydajność pompy płynie do połowy cylindrów silnika hydraulicznego, produkując dwa razy szybsze obroty oraz w przybliżeniu 40% max. chłonności przy podnoszeniu.
Przeciążenia zakresu dużych prędkości:
Jeżeli ładunek na haku jest za ciężki przy podnoszeniu go z duża prędkością presostat 1311 spowoduje przesterowanie zaworu 1221 w górne położenie dzięki czemu zawór 1141.1 przełączy się na zakres małej prędkości (pełna chłonność).
Podnoszenie i opuszczanie ładunku.
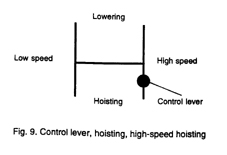
Przesterowując dżwignie w kierunku różnym od pozycji zwolnienia hamulców rys.9 spowodujemy podnoszenie ładunku. Serwozawory 1111.6,.9;1112.6,.9 zadziałają na serwomechanizm i zmienią wydajność pompy. W ten sposób pompy 1111 i 1112 będą pompować taką ilość hydrolu która będzie proporcjonalna do wychylenia dżwigni sterującej.
Jeżeli zamiast przesunięcia dżwigni ku dołowi przesuniemy dżwignie ku górze ładunek będzie opuszczany i wszystkie działania zaworów jak i momenty ich zadziałania są identyczne z wyjątkiem kierunku przepływu.
Funkcje zabezpieczające.
Obwód podnoszenia zawiera trzy elementy zabezpieczające:
- główny zawór ograniczający ciśnienie oraz zawory absorbujące uderzenia hydrauliczne
1141.2.1-30Mpa
1141.2.2-30Mpa
1111.2-10Mpa
1111.3-42Mpa
1112.2-10Mpa
1112.3-42Mpa
1111.10-27Mpa
1112.10-27Mpa
- presostat 1311 (zawór przęciążeniowy)-22.5Mpa. Zatrzymuje dżwig w przypadku przeciążenia oraz powoduje przejście z szybkich obrotów na wolne
- presostat 1381-0,7Mpa zatrzymuje dżwig w przypadku niewystarczającego ciśnienia zasilania
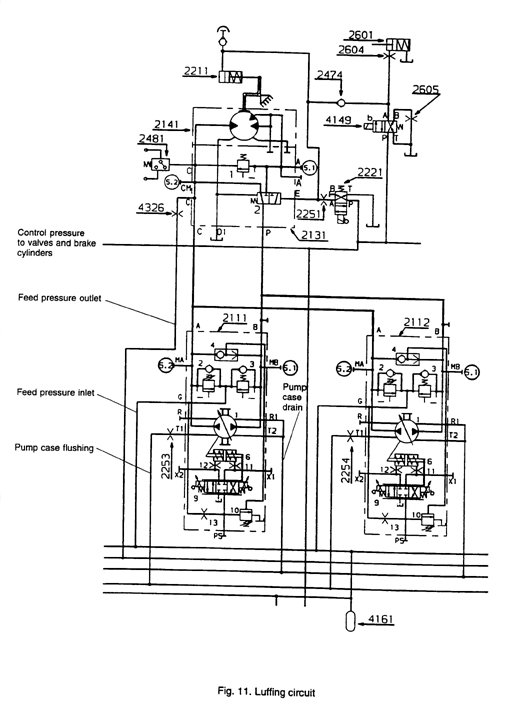
3.Obwód podnoszenia i opuszczania wysięgnika.
2111,2112-pompy o zmiennej wydajności
2141-silnik hydrauliczny
2131-zawór na silniku
2211-cylinder hamulca
Podnoszenie i opuszczanie wysięgnika oraz obrót dzwigu uzyskuje się dzięki jednej dżwigni
Zwolnienie hamulca:
Ciągnąc dżwignie np.do tyłu (generalnie, delikatny dżwigni w jakąkolwiek strąnę od pozycji neutralnej)powodujemy przesterowanie zaworu 2221. W ten sposób ciśnienie sterujące jest kierowane do cylindrów hamulców oraz do zaworu 2131.2, który przesterowując się łączy silnik z systemem hydraulicznym.
Jeżeli na haku znajduje się ładunek, a dżwignia jest w pozycji gdzie zwolniony jest hamulec , winda tego systemu powinna produkować wolny ruch obrotowy zgodnie z tym w jaki silnik hydrauliczny jest wyposażona.
Podnoszenie i opuszczanie wysięgnika:
Przesuwając dżwignię sterującą dalej do tyłu rozpoczyna się podnoszenie wysięgnika. Serwozawory 2111.6,.9;2112.6,.9 wywołują ruch serwomechanizmu, a przez to zmianę wydajności pompy. Pompy 2111 i 2112 w ten sposób będą miały wydajność proporcjonalną do wychylenia dżwigni sterującej.
Opuszczanie wysięgnika uzyskuje się poprzez przesunięcie dżwigni sterującej do przodu. Funkcje poszczególnych elementów układu są identyczne tylko kierunek przepływu jest odwrotny.
Funkcje zabezpieczające.
Obwód ten zawiera trzy elementy zabezpieczające:
- zawór 2131.1-35Mpa. Limituje ciśnienie w obwodzie oraz absorbuje uderzenia hydrauliczne.
- zawory 2111.3-42 Mpa
2111.2-10 Mpa
2112.2-10 Mpa
2112.3-42 Mpa
2111.10-10 Mpa
2112.10-10 Mpa
Odcinają i ograniczają ciśnienie w obwodzie.
- presostat 2481-1,2 Mpa. Zatrzymuje dżwig w momencie wystąpienia niewystarczającego ciśnienia zasilania.
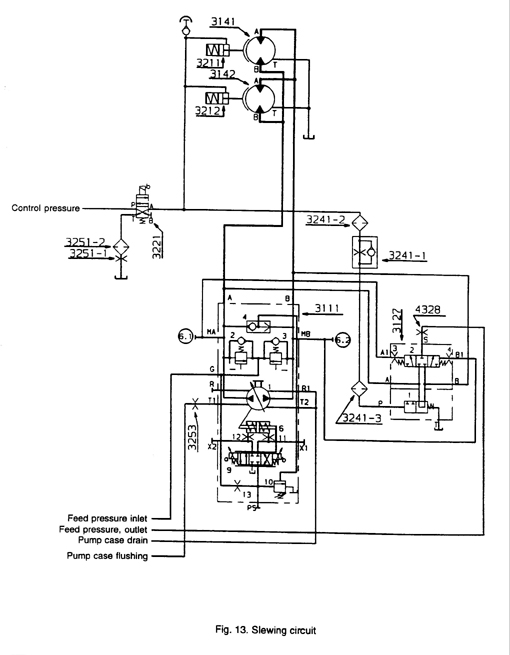
4.Obwód obracania żurawia.
3111-pompa o zmiennej wydajności
3141,3142- silniki hydrauliczne
3127-zespół zaworowy
3211,3212-cylindry hamulców
Obrót żurawia jest uzyskiwany dzięki ruchowi tej samej dzwigni, co podnoszenie i opuszczanie wysięgnika.
Zwolnienie hamulca.
Ruszając dzwignię sterującą, np. w lewo przesterowujemy zawór 3221, hamulce zostaną zwolnione oraz zespół odpowietrzający 3127 będzie zablokowany.
Obracanie żurawia.
Poprzez ruch dzwigni sterującej do końca, np. w lewo, żuraw zacznie się obracać w lewo (przeciwnie do ruchu wskazówek zegara). Serwozawór 3111.9 spowoduje przesunięcie serwomechanizmu, a przez to zmianę wydajności pompy.
Poprzez przesunięcie dzwigni w prawo spowodujemy obrót dżwigu w prawo (zgodnie z kierunkiem ruchu zegara). Funkcje elementów są identyczne tylko kierunek przepływu będzie inny.
Funkcje zabezpieczające.
Obwód obrotu dzwigu zawiera dwa elementy zabezpieczające
- główny zawór utrzymywania ciśnienia 3111.2,3111.3-34 MPa
- zawór odcinający 3111.10-28 Mpa
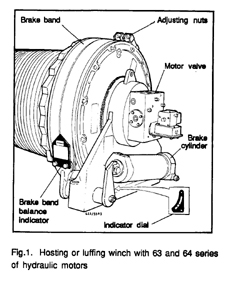
5.Budowa,działanie silnika hydraulicznego.
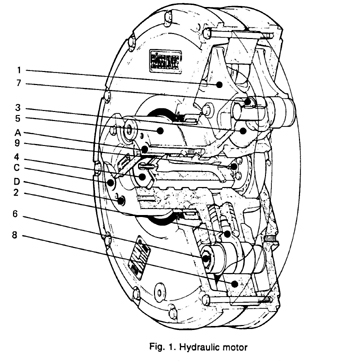
1-płyta prowadząca
2-korbowód
3-tłok
4-rozdzielacz
5-blok cylindrowy
6-sworzeńwodzika
7-krzywki rolkowe
8-pierścień krzywkowy
9-sprzęgło przeciążeniowe
A,C-okna
,D-kanał odpowietrzający
Silnik hydrauliczny jest silnikiem z promieniowymi tłokami i obracającą się obudową, która jest podtrzymywana na nieruchomym bloku cylindrowym (5) przez dwa łożyska główne. Równomierna ilość tłoczków promieniowych (3) pracuje w cylindrycznych otworach w bloku cylindrowym, który posiada także kanały dolotowe (A) i odlotowe (C). Każdy tłok jest połączony przez korbowód (2) do wodzików (6) na których są zamontowane krzywki rolkowe (7).Dwie wewnętrzne krzywki rolkowe dociskają pierścienie krzywkowe (8) podczas gdy dwie zewnętrzne pracują z odpowiednią im płytą prowadzącą (1).Pierścień krzywkowy (8) jest zamocowany do obracającej się obudowy. Rozdzielacz (4) kieruje olej do tłoczków podczas suwów pracy oraz kieruje z powrotem olej, który wykonał już pracę do linii powrotnej. Rozdzielacz jest połączony z obrotowa obudową przez sprzęgło przeciążeniowe.
6.Wymagania stawiane obsłudze przez producenta.
Zakaz pracy żurawiem przy trymie większym niż 2 stopnie oraz przechyle większym niż 5 stopni.
Jeżeli lina jest odchylona więcej niż 5 stopni od pionu, obsługa dzwigu zabroniona.
REFERAT Z PRZEDMIOTU
„NAPĘDY HYDRAULICZNE”
Dźwig hydrauliczny typu: GL 4027-2S
firmy MacGREGOR & HAGGLUNDS.
Wykonali:
Ewertowski Daniel
Grzebieniak Robert
Kurtyka Rafał
Wyszukiwarka
Podobne podstrony:
regulator pręd obr hydrauliczny, Akademia Morska, kurs na 2eng, automatyka
Przesterowanie i rozruch-kwit, Akademia Morska, kurs na 2eng, automatyka
GCU sygnały sterowania, Akademia Morska, kurs na 2eng, automatyka
Zabezpieczenie silnika-kwit, Akademia Morska, kurs na 2eng, automatyka
obliczenia żurawia, Akademia Morska, kurs na 2eng, automatyka
GCU, Akademia Morska, kurs na 2eng, automatyka
REGULATOR PGA, Akademia Morska, kurs na 2eng, automatyka
automatyka sciaga, Akademia Morska, 2 rok', Semestr IV, Automatyka
32-Pytania A4, Akademia Morska, 2 rok', Semestr III, Automatyka, Automatyka
instruk nowa, Akademia Morska, 2 rok', Semestr IV, Automatyka
instruknowa, Akademia Morska, 2 rok', Semestr IV, Automatyka
automatyka sciaga, Akademia Morska, 2 rok', Semestr IV, Automatyka
hydro2 symbol, Akademia Morska -materiały mechaniczne, kurs na 2 eng2010 od mariusza
Odpowiedzi na pytania z egzaminu 1, Akademia Morska, 2 rok, Podstawy automatyki i robotyki, automaty
sterówka, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoła, automaty, aytomaty,
Stefanowski- Układ zdalnego sterowania i zabezpieczeń, Akademia Morska -materiały mechaniczne, szkoł
RATOWANIE ŻUCIA NA MORZUst, Akademia Morska Szczecin Nawigacja, uczelnia, AM, AM, nie kasować tego!!
eegzam, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoła, automaty, aytomaty, Au
więcej podobnych podstron