8 9
8
/ = lm • sina*
TT
czyli u = L • cal ■ cos (ot = coL • /,
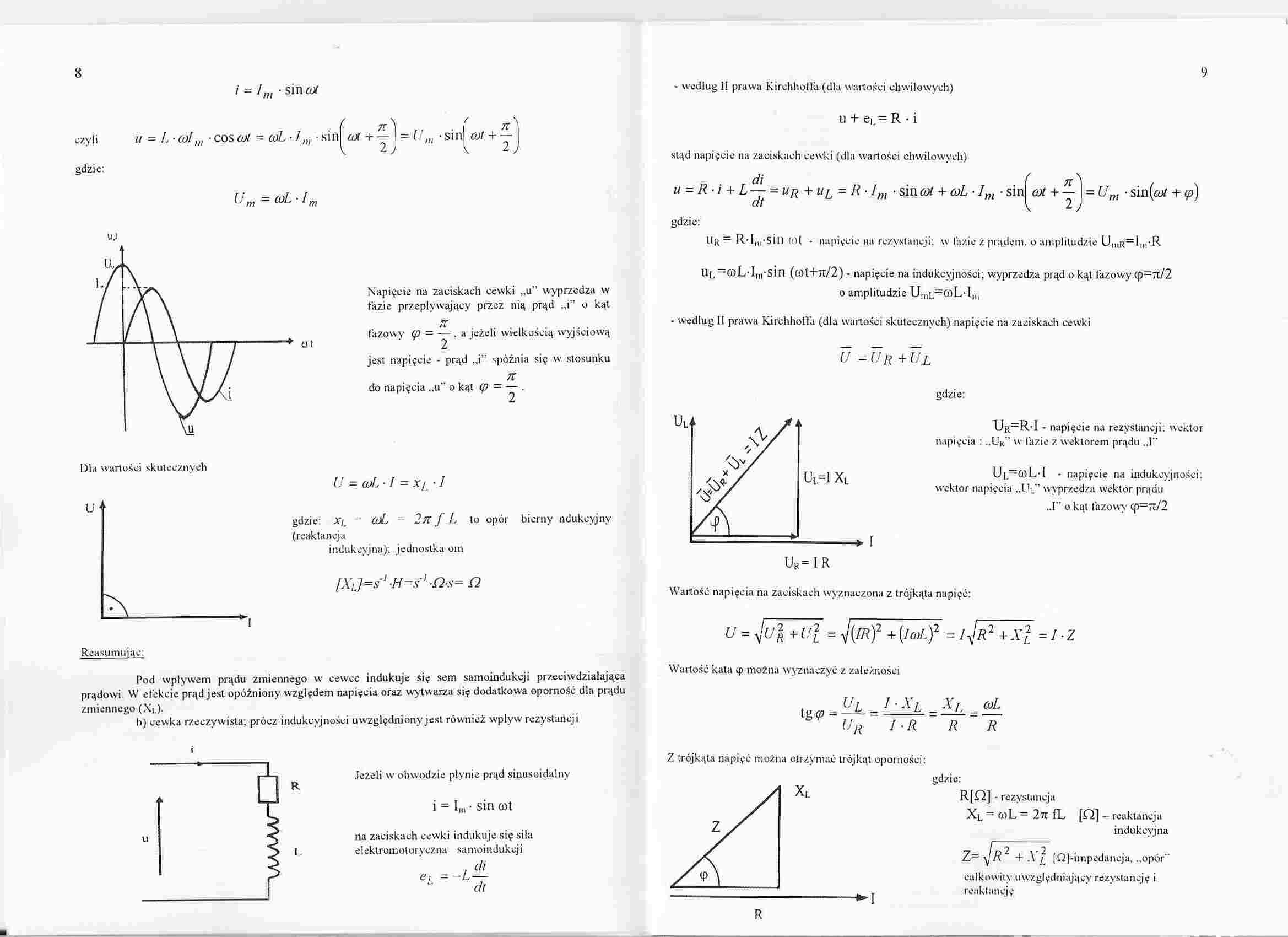
u.t
Napięcie na zaciskach cewki ,.u“’ wyprzedza w fazie przepływający przez nią prąd „i’’ o kąt
n .....
fazowy (p — — . a jeżeli wielkością wyjściową
jest napięcie - prąd ..i” spóźnia się w stosunku 7t
do napięcia „u" o kąt (p — — .
Dla wartości skutecznych
l: = (oL ■ I = Xp ■ 1
gdzie X'l — (ol- — 2TC f L to opór bierny ndukcyjny (reaktancja
indukcyjna); jednostka oni
[X,J=s‘-H=sl-Os= n
Reasumując
Pod wpływem prądu zmiennego w cewce indukuje się sem samoindukcji przeciwdziałająca prądowi. W efekcie prąd jest opóźniony względem napięcia oraz wytwarza się dodatkowa oporność dla prądu zmiennego (Xi.).
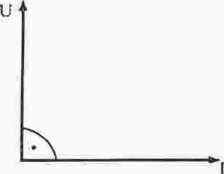
h) cewka rzeczywista; prócz indukcyjności uwzględniony jest również wpływ rezystancji
i
Jeżeli w obwodzie płynie prąd sinusoidalny
i = l„, • sin (ot
na zaciskach cewki indukuje się silą elektromotoryczna samoindukcji
di
e, = -L —
Z' dl
- według II prawa Kirchllplla (dla wartości chwilowych)
u + eL = R • i
stąd napięcie na zaciskach cewki (dla wartości chwilowych)
u = R ■ i + = u R + u i = R • lm • sin coi + coL ■ Im • sin^atf + y j = CJm • sin [cot + <p)
gdzie:
ll|< = R-It„-Sill rut - napięcie na rezystancji', w fazie z prądem, o amplitudzie Umu=Im-R
uL=©L-Im •sili (wl+7r/2) - napięcie na indukcyjności; wyprzedza prąd o kąt 1‘azowy tp—Jt/2 o amplitudzie U,„L=CoL‘lm
- według II prawa Kirchhoffu (dla wartości skutecznych) napięcie na zaciskach cewki
u =VR +UL
gdzie:
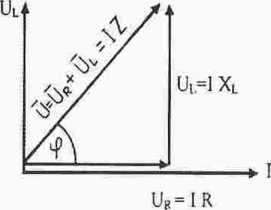
Ur-R-I - napięcie na rezystancji; wektor napięcia : ,.L’k" w luzie z wektorem prądu
U| =CdL-I - napięcie na indukcyjności: wektor napięcia ..IV’ wyprzedza wektor prądu ..I” o kąt fazowy C|>=7T/2
Wartość napięcia na zaciskach wyznaczona z trójkąta napięć:
U = ylu%+L'l =yl(m)2 +{JcoL)2 =l^R2+xl =I-Z
Wartość kata tp można wyznaczyć z zależności
U L
^<P = jjL = UR
IXL_XL coL I-R R R
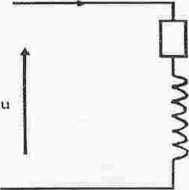
Z trójkąta napięć można otrzymać trójkąt oporności: gdzie:
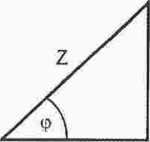
R[0] - rezystancja
XL = f.oL = 27T fL [Q] - reaktancja indukcyjna
I 2 *2
Z=^JR + .\ i |Q)-impedaneja, ..opór''
całkowity uwzględniający rezystancję i reaklancję
R
Wyszukiwarka
Podobne podstrony:
40 (272) 78 przy czym T ■ u R; Ty ■ T cos ot i Ry = R sina. Po uwzględnieniu tych zależności otrzymu
MAGAZYN .-DYNYNARtNK1 DLA BRANŻY TYK 1
■u ŁM. UH A* ■*«? * 4*TT> JTt& .A-T tm:.* * ? I-lE od) ej) r£> = iu^
Sieregi Fouriera1. Wielomiany i szeregi trygonometryczne: A sin( (Ot + (p) = A sin (Ot sin <p+A c
wzory redukcyjne Wzory redukcyjne sili(k • 360° 4- a) = sina tg(k • 180° 4- a) = tg a cos(k • 360° H
zad 7 b n y (a) Z równań mchu (1) wynika, że współrzędna y ma wartość minimalną (czyli y = 0), gdy c
63 (243) i 2. Równowaga płaskiego układu sił z uwzględnieniem sił tarcia Z warunków równowagi otrzym
sama nazwa coś oznacza, to mamy na myśli to, że wskazuje ona jakiś przedmiot, czyli swój desygnat. I
31 (603) i 2. Równowaga płaskiego układu sił z uwzględnieniem sił tarcia Z warunków równowagi otrzym
CAl V 40^ 50 to 40 o -10 CAl 3 O « jd • * Ot 05 O® iO
19489 p38 (8) » Tt Ll~ -"VTłr^ — 4p => 4^ C*v *«.) s 2, O- A^ót_^<A- i Ł«UrŁ. &£_ •Z
Wyklad (16) / = U0R R2 + co2 L2 sin ot co L U0 R2 + co2 L2 COS (Ot, (19) Zur Yereinfachung wird gese
084 (6) Równania trygonometryczne czyli sin 4.v sin .v cos 4.v cos x sin 4.v cos x - sin x cos 4x Te
© ^maIA i T W‘yuc3!; *7 / <C U^.Wy/W* • CaL/ - 07 +Ot?^ co? / «®„ ” cV ^
19489 p38 (8) » Tt Ll~ -"VTłr^ — 4p => 4^ C*v *«.) s 2, O- A^ót_^<A- i Ł«UrŁ. &£_ •Z
więcej podobnych podstron