57
110
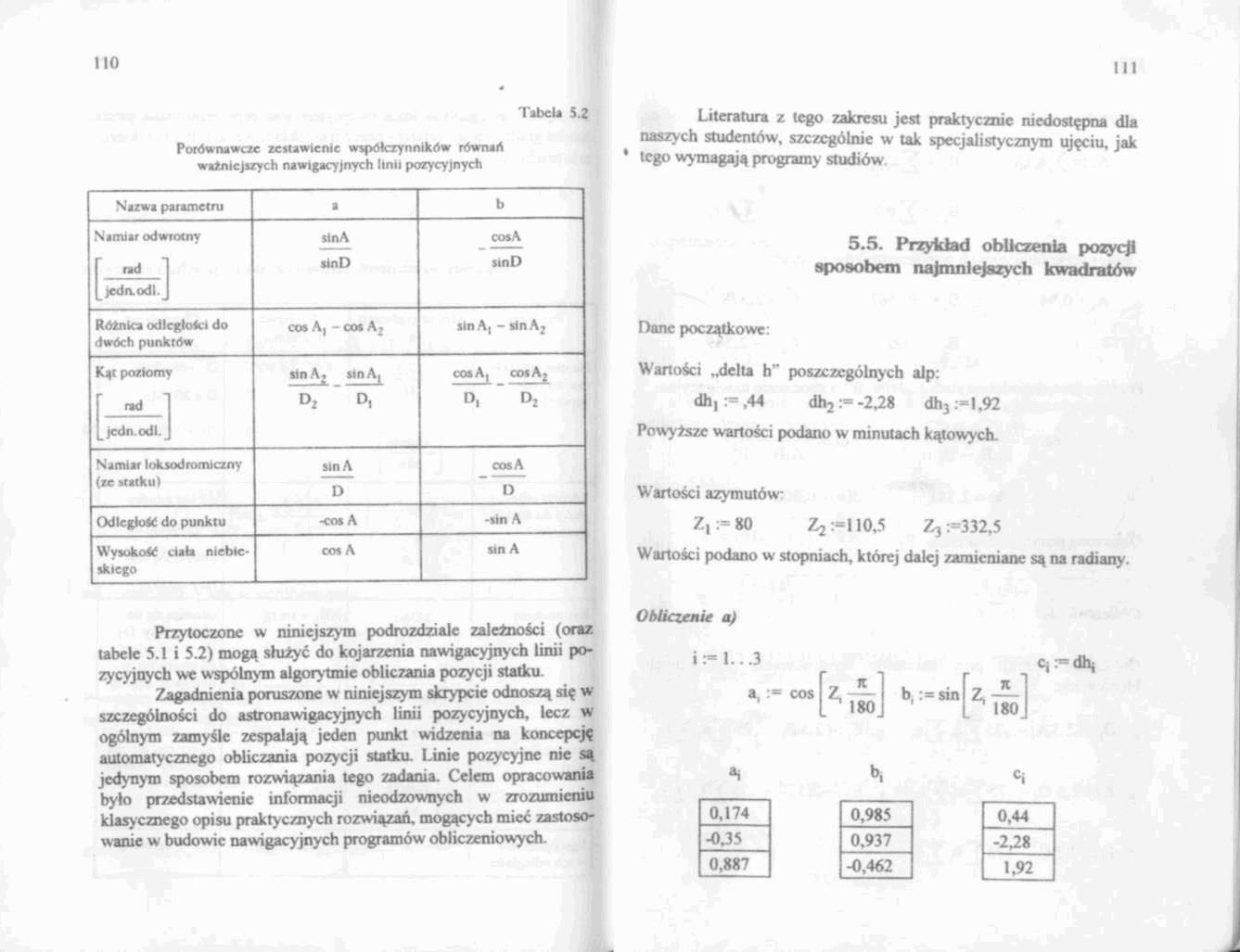
Tabel* 5.2
Porównawcze zestawienie współczynników równart ważniejszych nawigacyjnych linii pozycyjnych
|
Nazwa parametru |
a |
b |
|
Namiar odwrotny |
słnA |
cosA |
|
f ■* 1 |
sinD |
sinD |
|
|_jedr\.odl. J | ||
|
Różnica odległości do dwóch punktów |
cos A, - cos A2 |
sin A, - sin Aj |
|
K^t poziomy |
sin Aj sin A, |
cosA, cos Aj |
|
r «, i |
Dz D, |
D, D2 |
|
[_ jcdn.odl. J | ||
|
Namiar lok sod mmi ran v |
sin A |
cos A |
|
(ze statku) |
D |
D |
|
Odległość do punktu |
-cos A |
-sin A |
|
Wysokość ciała niebieskiego |
cos A |
sin A |
Przytoczone w niniejszym podrozdziale zależności (oraz tabele 5.1 i 5.2) mogą służyć do kojarzenia nawigacyjnych linii pozycyjnych we w'spólnym algorytmie obliczania pozycji statku
Zagadnienia poruszone w niniejszym skrypcie odnoszą się w szczególności do astronawigacyjnych linii pozycyjnych, lecz w* ogólnym zamyśle zespalają jeden punkt widzenia na koncepcję automatycznego obliczania pozycji statku. Linie pozycyjne nie są jedynym sposobem rozwiązania tego zadania. Celem opracowania było przedstawienie informacji nieodzownych w zrozumieniu klasy cznego opisu praktycznych rozwiązań, mogących mieć zastosowanie w budowie nawigacyjnych programów obliczeniowych.
Literatura z lego zakresu jest praktycznie niedostępna dla naszych studentów, szczególnie w tak specjalistycznym ujęciu, jak • tego wymagają programy studiów
5.5. Przykład obliczenia pozycji sposobem najmniejszych kwadratów
Dane początkowe:
Wartości „delta h'* poszczególnych alp:
dh, := ,44 dh2 -2.28 dh3 -1,92
Powyższe wartości podano w minutach kątowych.
Wartości azymutów
Z, := 80 Zj:-110,5 Z3 :=332,5
Wartości podano w stopniach, której dalej zamieniane są na radiany.
Obliczenie a)
i:~l. ..3 Cj^-dhi
a, :* cos j Z, —1 b, := sin | 21, —1
[ 180J ' P I80j
bl
|
0,174 |
0,985 |
0,44 | ||
|
-0.35 |
0.937 |
-2,28 | ||
|
0,887 |
-0,462 |
1.92 |
Wyszukiwarka
Podobne podstrony:
110 Tabela 5.2 Porównawcze zestawienie współczynników równań ważniejszych nawigacyjnych linii
skanuj0016 (32) Dla porównania zestawmy teraz reakcje kationów grupy 2A z NH3H20: Dobrze zdysocjowan
skanuj0016 Dla porównania zestawmy teraz reakcje kationów grupy 2A z NHyHjO: Dobrze zdysocjowanemu H
3. PORÓWNANIE ZESTAWIEŃ Z n-element owego zbioru Z tworzymy k-elementowe podzbiory/ciągi (dla n, k €
Wycena a wiarygodność i porównywalność sprawozdania finansowego WYKAZ WAŻNIEJSZYCH
0011 2 Porównaj i zestaw dwa podejścia do badania osobowości Istnieje wiele różnych teorii osobowośc
Str 139 IMGW publikuje w cyklu „Materiały do bilansu wodnego Polski” zestawienia bilansowe dla ważni
CCF20120509�049 U.L Częsc II. Rozwiązania i odpowiedzi a zatem z porównania zależności (7) i (8), ws
198 A. Bartnicki Class) dla pojazdów gąsienicowych i 110 MLC dla zestawów pojazdów kołowych. Stąd te
82 (110) oo ISO Zestawienie danych dotyczących kilku stopów Fe-Ni-Co Tablica 3-3 Nazwa
OD TŁUMACZA Tytuł Paragone (Porównanie) został współcześnie nadany pierwszemu rozdziałowi tzw.
75483 S5006299 Rye. 63. Porównawcze zestawienie analogicznych śladów pozostawionych przez technikę ś
więcej podobnych podstron