img175
175
Celujemy do wybranago punktu w dwóch położeniach kręgu oraz obliczany na podstawi© odczytów wartość kąta pionowego wolną cd błędu indeksu oraz wartość błędu Indeksu, posługując się odpowiednimi wzorami (95 - 105). Następnie celu jeny do tego samego punktu, np. przy połażeniu LP, i nastawiamy śrubą elewacyjną indeks na ctLczyt poprawiony o błąd indeksu według podanych wzorów, a środek pęcherzyka libeii kolimscyjncj sprowadzamy do punktu głównego śrubkami rektyfikacyjnymi llbcli. Po 'wykonaniu ty oh oayfl-aości błąd indeksu powinien być usunięty, Din kontroli nałoży ponownie poniorzyć ten 6an kąt pionowy przy dwóoh położeniach koła i sprawdzić, ozy otrzymujemy odozy ty równe odczytom poprawionym o błąd indeksu.
ą.2. TBYGCKCŁIBTRTCZTry FCUIAR 7TÓSOKOŚCI
Trygonometryczny poniar wysokości, czyli ni\felacja trygonometryczna, polega na wyznaczeniu różnicy wysokości dwóch punktów A i B na pod
stawie pomierzonej odległości poziomej oraz kąta wysokości. Pomiar różnic wysokości i rzutów poziomych nawiązujemy do osnowy wysokościowej i poziomej.
Dla odległości 1 większych niż 300 - 400 a należy przy obliczeniu wartości h uwzględnić wpływ kulistoścl Ziemi i refrakcji ziemskiej.
W geodezji ogólnej niwelację trygonometryczną stosujeiy v szczególnych przypadkach, np. w geodezji górniczej w kopalniach przy stromych wyrobiskach korytarzowych. Rozróżniamy' tam głównie niwelację trygoneme-tryczoą z koś ca 1 ze środka.
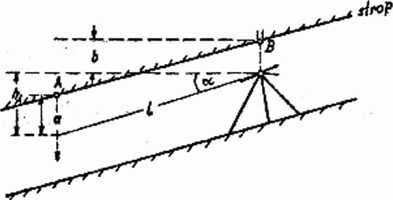
Niwelację trygonometryczną z końca ilustruje rysunek 167. Należy tam określić różnicę wysokości punktów! i 3, przy pomiarze kąta pionowego a, długości pochyłej 1 oraz odcinków plonowychi między miejscem celu a punktem 1, ożyli odoinek a, i między osią obrotu lunety a punktem B, czyli odoinek b. Różnioa wysokości zostanie określona wzorem
=hA + b- a = l sina + b - a (1C6)
Rys. 137
Wyszukiwarka
Podobne podstrony:
img175 175 Celujemy do wybranago punktu w dwóch położeniach kręgu oraz obliczany na podstawi© odczyt
img175 175 Celujemy do wybranago punktu w dwóch położeniach kręgu oraz obliczany na podstawi© odczyt
img175 (6) 175 Celu jemy do wybranego punktu w dwóch położeniach kręgu ora7. cbliezaHy na podstawie
img175 (6) 175 Celu jemy do wybranego punktu w dwóch położeniach kręgu ora7. cbliezaHy na podstawie
img175 (6) 175 Celu jemy do wybranego punktu w dwóch położeniach kręgu ora7. cbliezaHy na podstawie
W modelu tym masę i sztywność dźwignicy sprowadza się do wybranego punktu jej konstrukcji nośnej. Pu
skierowanie sprawy do sądu Z punktu widzenia charakteru reklamacje dzielą się na •
IMAG0045 z powrotem do własnej naturalnej rzeczywistości, by stworzyć nowe relacje na podstawie naby
Załącznik nr 4 do Zasad odbywania praktyk dnia WNIOSEK O ZALICZENIE PRAKTYK NA PODSTAWIE ZATRUDNIENI
Pojęcie i cliarakter prawa do firmy 9Prawodo firmy jest prawem podmiotowym przedsiębiorcy, na podsta
A/„. jest proporcjonalny do natężenia I bodźca już działającego, czyliA r0 — const Na podstawie tego
2 (765) położenia wskaźnika na skali odczytujemy wartość opisywanego zjawiska. Typowym przykładem an
40 Wybrane problemy w realizacji konstrukcji wstęgowej z betonu sprężonego na podstawie kładki piesz
Uwaga: Przypomina się o obowiązku zgłaszania do rejestru REGON faktu zawieszenia działalności oraz o
DSCN9344 II. Przygotowanie surowca Glinę do lepienia naczyń pobrano z tych złóż w Worytach, które na
Lewar7 125 Podstawiając do tego wzoru R = n • rQ oraz ustaloną na podstawie równania (114) zależność
s076 (3) 76 Poznaj Linux do dokumentów tekstowych numery stron, nagłówki, marginesy itp. na podstawi
więcej podobnych podstron