Mechanika ogolna0014
29
28
rad
....... = 2 • con

Dane:
P - ciężar [N],
k - te w. współczynnik sprężystości sprę-
"N"
zyny
n-n
co, = const. =-= co
30
-długość sprężynynieobciążonej [m].
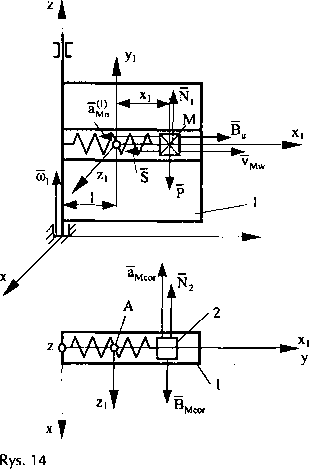
Na rysunku 14 widzimy, że bryła 1 obraca się wokół nieruchomej osi z, ruch tej bryły to ruch unoszenia dla bryły 2. Bryła 2 się przemieszcza, czyli punkt M porusza się względem bryły 1. Przyjmujemy układ osi xyz. Punkt A, który jest początkiem ruchomego układu odniesienia Xiy!Z! związanego z bryłą 1, wiążemy z końcem sprężyny o długości początkowej 1 (zakładamy, że ruch punktu M odbywa się od punktu A). Określimy siły zewnętrzne działające na punkt materialny M:
N[ - reakcja podłoża na kierunku osi z układu odniesienia,
N2 - reakcja podłoża na kierunku osi x,
S = k ■ A - wartość siły reakcji sprężyny, gdzie A - deformacja sprężyny,
Bu = -m • au - siła unoszenia.
W naszym przypadku deformacja jest równa przemieszczeniu liniowemu punktu M, czyli A = xi. Przyspieszenie unoszenia punktu M jest lo przyspieszenie liniowe punktu M przypisanego bryle 1. Ponieważ brylu 1 jod w mchu (linolowym, przyspieszenie to można rozłożyć na dwie składowe lUMHWllie i Nlycznc:
-a<‘) -aW +o(')
,lMu “ dM ~ “Mn T “Mi’
ule ei, = const., czyli = 0. Ostatecznie więc przyspieszenie unoszenia wynosi:
a Mu “ aMn = ®i 0 + x')’
Ktd/ir I + xi - odległość punktu M od osi obrotu bryły 1. Wiiilość siły unoszenia wynosi zatem:
p
ll„ =- m • aMu = m • a$n = —cof (1 + Xj),
I łt t)i = -m • aMcor - siła Coriolisa.
|*i zyspicszenie Coriolisa wyznaczamy ze wzoru:
W naszym przypadku <ou = , a prędkość względna punktu M vMw = x,. Wek-
łni przyspieszenia Coriolisa aMcor jest równoległy do osi x niemchomego układu odniesienia, a jego zwrot przeciwny do zwrotu tej osi. Wartość tego wektora wynosi:
Wsin- = 2co1-x1.
/yisinic z wcześniejszym wzorem wektor siły Coriolisa BMcor ma kierunek pi zyspieszenia aMcor, jego zwrot jest przeciwny do zwrotu wektora przyspieszeniu, czyli zgodny z osią x nieruchomego układu odniesienia. Wartość tego wek-li u u wynosi:
m-aMcor=2-co-x,.
Mńwnaniu różniczkowe ruchu względnego masy M
• na kierunku osi xp ni • x,M = -S + Bu,
• na kierunku osi yp m • y,M 0 P i N,, bo y1M ^ consl.,
• na kierunku oni zp ni żIM - 0 - ■ N, ł H,,,,, bo zIM -■ consl.
Wyszukiwarka
Podobne podstrony:
mechanika ogolna�8 Zad.6 Jednorodny pręt o długości 2a ciężarze Q ustawiono na poziomej podłodze i o
Mechanika ogolna0077 V R1 S <>2 = ~-8(Pl> z-r2 8rc = r, -Sep,. Wprowadzam
06zmiena długości ściegu 1 *6. FEED MECHANISM COMPONENTS (1) 20 I® 35 33 34 32 31 30 29 28 39 37
Mechanika ogolna0007 14 14 Rys. 6 Dane: P - siła ciężkości masy [N], x = X-t2 - przemieszczenie masy
Mechanika ogolna0053 m, ix(p,). M i=l natomiast da, dp, dy to dane kąty obrotu elementarnego wokół o
Mechanika ogolna0075 VA * A przemieszczenie przygotowane punktu A będzie następujące: 8rA r ■ iS(p.
Mechanika ogolna0076 191 moment główny sil bezwładności: Ha = -IA • e, (zakładamy, że e! jest znane)
mechanika ogolna�9 JZad. 9 Płytkę o ciężarze O ustawiono na dwóch jednakowych walcach o promieniach
więcej podobnych podstron