Mechanika ogolna0077
V R1 S
<>2 = ~-8(Pl>
z-r2
8rc = r, -Sep,.
Wprowadzamy te zależności do ogólnego równania dynamiki, otrzymując:
5L =
P, .2
R,
R,
M—Li • ćpj - P, -sina + ——R, -ćp. —L-P, -f-——cosa + g l ‘ 2-g 1 2 - 2-r,
PR P
■ R1 • <Pi + p3 (sin P - V ■ cos a) r, - -J-r, - (p, ■ r,
8cp, = 0.
Ponieważ Sep, ^ 0, to [ ] = 0, a stąd przyspieszenie kątowe bryły 1 wynosi:
ex = <Pi =
•g-
2-M-r2 -P2 -R,(r2 -sina + f •cosa) + 2-P3 r, -rjsinp-p-cosp 8 • P, • i2 + 2 • P2 • Rf + P2 • Rf + 8 ■ P3 • r2
Znajomość tej wielkości pozwala na określenie interesujących nas parametrów kinematycznych ruchu poszczególnych punktów czy brył układu.
5.4. Równania Lagrange'a
5.4.1. Więzy i ich równania
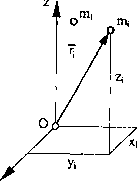
Niech będzie dany zbiór punktów materialnych zwany układem punktów materialnych (rys. 93).
Jeżeli na układ punktów nie narzucono żadnych ograniczeń, to taki układ nazywamy swobodnym. W praktyce inżynierskiej spotykamy się z zagadnieniami, w których ruch układu punktów materialnych podlega pewnym ograniczeniom, na przykład takim, że określone punkty układu muszą stale pozostawać na pewnej powierzchni, krzywej itd. Układ punktów materialnych jest wówczas układem nieswobodnym. Ograniczenia te nazywamy więzami. Można je zapisać w postaci analitycznej i dostajemy wówczas tzw. równanie więzów. Na układ narzucono przykładowo następujące więzy:

I';,(x,yiZ|,x2y2Z2...xnynz„) = 0
z
X
m„
o
Rys. 93
y
- układ punktów materialnych r = r(xj>y.,zi) - wektor promień opisujący położenie
i-tego punktu materialnego
Zależność (206) to równania wiązów narzuconych na układ punktów materialnych. Są to najczęściej wiązy występujące w układach technicznych, nazywane wiązami geometrycznymi (holonomicznymi), dwustronnymi, czyli takie więzy, które narzucają ograniczenia na współrzędne. Nie zależą one w sposób jawny od czasu, są stacjonarne albo skleronomiczne.
Rozważmy przykład dwóch punktów materialnych połączonych liną (rys. 94).
z
m.
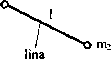
nierozciągliwa
Rys. 94 x.
Lina łącząca punkty jest zawsze napięta, więc:
12 = (xi - xz )2 + (yi - y2 )2 + (zi - zz )2 -
To równanie jest równaniem więzów narzuconych na układ dwóch punktów materialnych (lina jest tu wiązem). Równanie więzów zapiszemy w postaci:
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0012 24 n 2X=o^g-t-b = o (59) i=l n £piy=0->N-P = 0 (60) i=l Po podstawieniu zale
Mechanika ogolna0014 29 28 rad ....... = 2 • con Dane: P - ciężar [N], k - te w. współczynnik spręży
Mechanika ogolna0034 68 Moment bezwładności krążka: IA =—m-r =-r . Po podstawieniu do rów- 2-g nań
mechanicznego skhdu i odlewania wierszy druku — linotyp 1892 Wprowadzenie prasy rocacyjnej do druku
str126 (5) 126 2. FUNKCJE SPECJALNE Wprowadzając uzyskaną zależność do całki (1),
wprowadzono tę nazwę do traktatów), poprzez wprowadzenie postępowania współpracy w zakresie stanowie
56763 str273 § 1. POJĘCIE TENSORA 273 Wprowadzając te oznaczenia do wzorów (4) mamy E„
dyrektywy Unii Europejskiej. Wszystkie państwa członkowskie wprowadziły te dyrektyw do własnego
str126 (5) 126 2. FUNKCJE SPECJALNE Wprowadzając uzyskaną zależność do całki (1),
FizykaII073�01 158 158 dfya= Wprowadziwszy tę wartość Q do formułki (II), otrzymamy (iii) r =
Mechanika Ogólna Wykład 2 pdf2 rootnoęae hińioi^jśŁrzynotj pl&&xzc<ztoę J_ L Honr?ey?f
więcej podobnych podstron