Mechanika ogolna0086
(221)
1>'. a (*>;), iln\ «H
Możemy dalej zapisać, że:
dVj dr{ _ d dt 9qj dt
|
_ d |
(<%) | |
|
vir- l 5c*iJ |
- V:-- dt |
Wówczas: 8 (dłp. oy,
v5qj;
dąs l dt J aąj
/ wyrażenia na prędkość i-tego punktu wywnioskujemy, że pochodna cząstkowa "ij względem współrzędnej uogólnionej qj jest równa:
9qj <łj 9ąj
Podstawiając do wyrażenia (221) powyższe wielkości, dostaniemy:
|
d |
f > | ||
|
dt |
vi—L l dchj |
vi |
Wykorzystując wzory na pochodną funkcji, zapiszemy:
|
_ d | ||
|
dt |
_d dt
_ dVj 1 dvf
V‘ 9qj 2 5qj
Uogólniona siła bezwładności będzie równa:
QjB ~
dt
tf2
8E
dt
gdzie E - energia kinetyczna układu.
|
d | |
|
dt |
1^1 ż |

Jest to tzw. równanie Lagrange’a drugiego rodzaju. Równanie (222) wykorzystujemy do opisu zjawiska ruchu układu. Energia kinetyczna układu jest funkcją współrzędnych uogólnionych i prędkości uogólnionych:
E = E(q1...qs,qI...qs),
Qj - siła uogólniona odpowiadająca j-tej współrzędnej uogólnionej.
Przykład 31 /
Opisać zjawisko ruchu mechanizmu pokazanego na rys. 106, stosując równania Lagrange’a drugiego rodzaju. Układ jest złożony z trzech brył. Pierwsza może wykonywać ruch obrotowy dokoła punktu A, druga jest to krążek o zróżnicowanej średnicy. Współpracuje on z bryłą 1 bez poślizgu w punkcie S oraz jest połączony z 3 cięgnem. Załóżmy, że cięgno jest nierozciągliwe i napięte dla każdej chwili czasu. Bryła 3 może poruszać się ruchem postępowym po nachylonej równi, której współczynnik tarcia znamy.
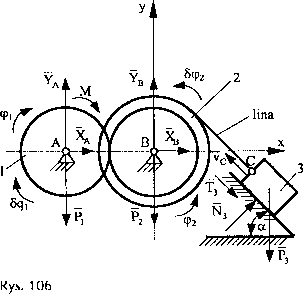
Dane:
P,1
P2 ) - siły ciężkości działające na po-
P3J
szczególne bryły [N],
M - para sił działająca na bryłę 1 [N-m],
r )
' 1 — geometryczne wielkości
R2 = 2 • r2 j
bryły 1 i 2 [m],
ig'’ = r2 - promień bezwładności bryły 2 [m],
a - kąt pochylenia równi [rad], p - współczynnik tarcia suchego.
Przyjmijmy za współrzędną uogólnioną przemieszczenie kątowe bryły 1:
=<fc,
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0004 1. DYNAMIKA PUNKTU MATERIALNEGO1.1. Siły działające na punkt materialny Siły te
Mechanika ogolna0022 44 kich punktów materialnych określonych względem bieguna O. Wielkość tę mo-
skanuj0072 (42) Rozdział 3. ♦ Instrukcje sterujące i funkcje 85 możemy ją zapisać z zastosowaniem sk
Mechanika ogolna0040 KO Pochodna wektora jednostkowego jest równa prędkości liniowej końca tego wekt
Mechanika ogolna0051 Wit-IktiŃć okivŃlum
Mechanika ogolna0057 114 linergia całkowita układu wynosi więc: En=^(P,+3-P2 + 2P3). 4g lilcmentama
więcej podobnych podstron