napmasz04
40
Wartość poślizgu silników asynchronicznych jest 1,5 -f 6%.
W zależności od wartości poślizgu, silniki dzieli się na dwie grupy o różnych prędkościach obrotowych znamionowych:
A (poślizg 1,5 -r 4%) nn : 2865 | 1435 | 960 | 720
B (poślizg 3 -f 6%) nn : 2820 | 1410 j 945 | 710
W obrabiarkach skrawających stosuje się najczęściej silniki grupy B.
W maszynach do obróbki plastycznej,

Rys. 4.3. Charakterystyki mechaniczne silnika indukcyjnego: 1 - z normalnym poślizgiem, 2 - z powiększonym poślizgiem
szym od znamionowego jest krótki, « mniejszym od znamionowego.
których układ napędowy ma koło zamachowe, korzystne jest zastosowanie silników ze zwiększonym poślizgiem. Energia oddana w jednym cyklu technologicznym przez układ „silnik indukcyjny — koło zamachowe” jest tym większa, im większy jest poślizg krytyczny silnika. Dopuszczalne są wówczas duże różnice między maksymalnym i minimalnym poślizgiem (rys. 4.3). Są to silniki z celowo powiększoną rezystancją obwodu wirnika. Czas pracy tych silników przy obciążeniu wyż-następnie silnik pracuje przy obciążeniu
3. Moc znamionowa Pa i moment obrotowy znamionowy Mn> którymi silnik może być obciążony przez czas nieograniczenie długi, bez obawy wzrostu temperatury uzwojeń ponad wartość dopuszczalną
[kW]
Mn na
n n
9550
gdzie: Mn [Njn], nn [obr/min].
4. Moment rozruchowy Mr, rozwijany na wale silnika w chwili jego uruchomienia, którego wartość zależnie od konstrukcji i mocy silnika zawiera się w granicach 1,6 - 2 Mn.
W miarę wzrostu prędkości obrotowej silnika, moment obrotowy rośnie do wartości granicznej maksymalnej Mk, po czym maleje.
Sprawność silnika zależy od jego mocy i konstrukcji i wynosi - 0,8 -r -r 0,9. Największą sprawność silnik osiąga przy obciążeniu znamionowym, natomiast jej gwałtowny spadek następuje, gdy obciążenie silnika jest poniżej 25% mocy znamionowej. Sprawność tę określa zależność
„ _ p*
Pei \/3 E//cos<p
gdzie: PE - moc oddawana na wale silnika [W],
P . - moc elektryczna pobierana z sieci [W],
U — napięcie międzyprzewodowe [V],
l — natężenie prądu przewodowego [A);
cos <p — współczynnik mocy.
Współcześnie do zasilania silników asynchronicznych klatkowych prądem o regulowanej częstotliwości i regulowanym napięciem są stosowane tyrystorowe przemienniki częstotliwości (statyczne przetworniki częstotliwości), które są urządzeniami przekształcającymi trójfazowe napięcie sieci zasilającej o regulowanej częstotliwości i o regulowanej wartości (rys. 4,4). Znajdujący się w przemienniku częstotliwości elektroniczny układ sterujący, samoczynnie dostosowuje częstotliwość i napięcie prądu zasilającego silnik do nastawionej jego prędkości obrotowej i kierunku obrotu.
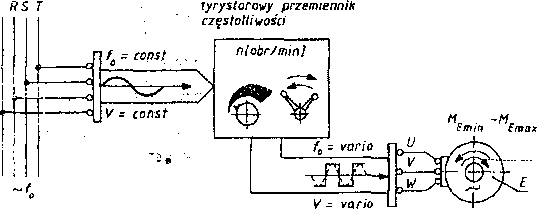
Rys. 4.4. Schemat zasilania indukcyjnego silnika asynchronicznego klatkowego z zastosowaniem tyrystorowego przemiennika częstotliwości
4.2.3, Silnik synchroniczny szybkobieżny
Jest to silnik o prędkości obrotowej synchronicznej ns > 3000 obr/min, uzyskiwanej przez zasilanie prądem o częstotliwości fo > 50 Hz.
Silniki takie są stosowane do napędu np. wrzecion szlifierek do otworów, pracujących z prędkością obrotową nWR < 60 tys. obr/min i małych wiertarek o rttfg- < 20 tys. obr/min:-
4.2,4. Silnik prądu stałego bocznikowy obcowzbudny
Silnik taki pozwala na bezstopniową zmianę prędkości obrotowej wirnika. Stosowany bywa np. w obrabiarkach skrawających, szczególnie sterowanych numerycznie. Odznacza się sztywną charakterystyką mechaniczną, dużym momentem rozruchowym oraz płynną zmianą prędkości obrotowej.
Wyszukiwarka
Podobne podstrony:
napmasz04 40 Wartość poślizgu silników asynchronicznych jest 1,5-f 6%. W zależności od wartości pośl
Wartość sygnału sterującego dla członu całkującego jest zależna od wartości uchybu w chwilach
SWScan00013 14 Kontrakty terminowe i opcje gdyż jej wartość jest zależna od ceny akcji IBM. Kontrakt
Radon w środowisku człowieka Wartość współczynnika emanacji radonu/ jest zależna od różnych
Image 008 Wll -4 6.5.3. Układy o sterowaniu wewnętrznym Moment elektromagnetyczny silnika jest zależ
26 27 (40) 26 Akademia sieci Cisco Każda warstwa jest zależna od dostępnych usług warstwy OSI, która
skanuj0015 (231) Analogicznie reakcja instrumentalna, jeśli jest zalezna od jakiegoś sygnału, wystąp
img209 209 więc* energia promieniowania gazu Jest zależna od temp era tury gazu Tg oraz od iloczyn
Łożyska toczne - trwałość Trwałość jest zależna od obciążenia.L- Pq = const.q = 3 10 9 =
silowniki�2 Z kolei przesunięcie trzpienia siłownika "x" Jest zależne od ciśnienia wyjści
IMG880 (3) Poch / reeei Pochłanianie przez makro fagi zmodyfikowanych lipoproicin jest zależne od sc
Mąka przenna wodochłonnośc (3) * warte w mące. Chłonność wody jest zależna od ilości i jakości glute
Finanse p stwa Wypych 2 273 Wykorzystanie dźwigni w zarządzaniu przedsiębiorstwem Stopień dźwigni łą
więcej podobnych podstron