0000050

je w miejscu, natomiast nasada dalsza obraca się wokół głowy kości łokciowej. W wyniku tego trzony obu kości przedramienia, ustawione równolegle w położeniu supinacyjnym, ulegają skrzyżowaniu w położeniu pronacyjnym (p. ryc. 53). Biorąc pod uwagę, że krzyżowanie trzonów następuje w połowie długości przedramienia, łatwo możemy zrozumieć, że efekt tego ruchu maleje wraz ze skracaniem kikuta. Według Taylora zakres ruchów obrotowych dobrze usprawnionego kikuta przedramienia wynosi 100 — 120° (norma fizjologiczna 180°), zakres ruchów kikuta średniego — 60 — 100°, natomiast krótkiego kikuta — 0 — 60°. Główny i najsilniejszy zginacz przedramienia, mięsień dwugłowy ramienia, przyczepia się do guzowatości kości promieniowej, tuż poniżej jej szyjki. Dlatego też wszelkie kikuty powyżej tego poziomu traktujemy jako kikuty ramienia, wykorzystując nieefektywną ruchowo część przedramienia do zawieszenia protezy.
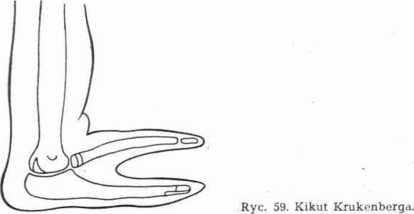
Specjalnym rodzajem kikuta przedramienia jest kikut Krukenberga (ryc. 59). Jest to kikut kineplastyczny, będący zastępczym organem chwytnym, dysponujący funkcją czucia. Przygotowanie polega na podłużnym rozdzieleniu obu kości przedramienia i skinetyzowaniu ich przez odpowiednie rozdzielenie grup mięśniowych. Zabieg ten jest dość trudny technicznie i wymaga dużej dokładności. Wskazaniem do jego wykonania są amputacje w obrębie przedramienia u niewidomych. Mimo niewątpliwych walorów funkcjonalnych tego kikuta może on budzić zastrzeżenia od strony kosmetycznej. Dlatego też nawet sam Krukenberg skonstruował specjalną protezę dla tych, którzy odczuwają potrzebę posiadania ręki w kontaktach z innymi ludźmi.
Przy amputacji w obrębie ramienia mamy na uwadze ogromne znaczenie długości kikuta i pełnego zakresu ruchów w stawie barkowym dia kontroli ruchów protezy. Długi kikut ramienia stwarza dźwignię zdolną do uniesienia całej konstrukcji protetycznej, ustawienia jej w pozycji dogodnej funkcjonalnie i wywołania efektywnego ruchu w jej stawie łokciowym. Dla wyzyskania czynnego ruchu rotacji ramienia Marąuardt wykonuje osteotomię kątową kikuta kości ramiennej zyskując rodzaj
haka, służącego do zakotwiczenia na nim leja protezy. Do tego samego celu można wykorzystać dalszą nasadę ramienia w przypadku amputacji na poziomie stawu łokciowego, a także bardzo krótki i nieefektywny ruchowo kikut przedramienia.
Począwszy od poziomu amputacji na wysokość przyczepów mięśni ograniczających dół pachowy, poprzez całkowitą amputację kończyny górnej w obrębie stawu barkowego oraz w obrębie obręczy kończyny górnej — zdolność sterowania protezą obniża się prawie do zera.
Źródła energii ruchowej w protezach kończyn górnych
Opierając się na kryteriach funkcji rozróżniamy dwa typy protez. Protezy typu biernego stosujemy u osób, które nie chcą korzystać z protez kinetycznych lub nie posiadają warunków na efektywne sterowanie ruchami protezy. Protezy typu czynnego, zwane również kinetycznymi, są standardowym zaopatrzeniem prz-y amputacjach w obrębie przedramienia oraz ramienia. Przy odpowiednim przygotowaniu pacjenta oraz adaptacji konstrukcji możemy je również efektywnie zastosować w wysokich amputacjach obustronnych. Nie każdy jednak pacjent jest zdolny do dużego i długotrwałego wysiłku, związanego z opanowaniem sterowania protezą.
Protezy typu czynnego służą do wykonywania podstawowych czynności życia i czynności związanych z pracą zawodową. Odtwarzają one funkcję amputowanej kończyny w stopniu odpowiednim do sprawości ogólnej i aktywności użytkownika oraz poziomu amputacji i sprawności mechanizmów protezy. Kolejność uszeregowania tych zależności nie jest przypadkowa, lecz opiera się na wieloletnim doświadczeniu licznych ośrodków zajmujących się protezowaniem kończyny górnej. Dlatego też szczególny nacisk kładzie się na usprawnianie ogólne przed przystąpieniem do protezowania oraz ćwiczenia w posługiwaniu się otrzymaną protezą.
Proteza typu czynnego może uzyskiwać swą energię ruchową z różnych źródeł, znajdujących się w obrębie ciała lub poza nim. Może to więc być energia przenoszona na protezę drogą mechaniczną z kurczącego się mięśnia tej samej kończyny, z jej ruchów w zachowanych stawach, ruchów obręczy kończyny górnej, ruchów karku, tułowia. Może to być energia pochodząca ze źródeł pozaustrojowych, jak sprężony dwutlenek węgla, energia elektryczna.
Rzadko obecnie wykorzystywanym, niemniej wartym uwagi sposobem uruchamiania mechanizmu chwytnego protezy, jest mechaniczne przeniesienie przesuwu i siły kurczącego się mięśnia. Sauerbruch opraco-
101
Wyszukiwarka
Podobne podstrony:
IMG127 & wrezultacie, krążek obraca się wokół swej osi pod działaniem sił Gdy oba otwory pokrywa
fakt Arystarch z Samos pierwszy zaproponował heliocentryczną budowę układu, słonecznego gdzie Ziemia
NASTĘPSTWA RUCHU OBROTOWEGO ZIEMI Ziemia obraca się wokół własnej osi z zachodu na wschód (przeciwni
Rozdział I Cały świat obraca się wokół archiwaliów Przedmiot i zakres archiwistyki Za przedmiot
Trój komórkowy model cyrkulacji: komórki Hadley a, Ferrelai biegunowa Gdyby Ziemia nie obracała się
który może obracać się wokół poziomej osi, został przywiązany ciężar (rys.40). Ciężar ten zaczął
fiz04 V 23.3-^iemia obraca sie wokół swoiei osi przeciwnie do ruchu wskazówek zegara pewienobiekt po
077 4 Rozdział 17Boża wymiana Całe posłannictwo ewangelii obraca się wokół jednego wyjątkowego wydar
bry?y A BRYŁYGRUPA A 1- Która z narysowanych figur jest stożkiem? 2. Prostokąt obraca się wokół zazn
Polaryzacja eliptyczna - rodzaj polaryzacji, kiedy wektor E obraca się wokół promienia, a koniec wek
11659487?4159602975879758548445297714269 n I. Zapora w kształcie wycinka walca o promieniu R 4 m, mo
DSC00315 (11) przykład 50 Sześcian o boku 2b obraca się wokół przekątnej ściany dolnej, z prędkością
bry?y B BRYŁYGRUPA B 1- Prostokąt obraca się wokół zaznaczonej osi. Promień podstawy walca powstałeg
bry?y B` BRYŁYGRUPA B 1- Prostokąt obraca się wokół zaznaczonej osi. Promień podstawy walca powstał
Trójkomórkowy model cyrkulacji: komórki Hadley a, Ferrelai biegunowa Gdyby Ziemia nie obracała się w
WSTĘP TEORETYCZNY Wahadło Oberbecka jest to rodzaj krzyżaka (rys.1), który może obracać się wokół os
WSTĘP TEORETYCZNY Wahadło Oberbecka jest to rodzaj krzyżaka (rys.1), który może obracać się wokół os
więcej podobnych podstron