009 3
1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO
PARAMETRY ZADANE:
(warianty)
(parametry wału wyjściowego)
|
A. |
F*y |
N; |
V r wy |
. m/S; |
Dwy. 1 |
mm; 7, st. | |
|
B. |
Twy, |
Nm; |
CJwj |
. 1/s; |
r,st. |
10. | |
|
C. |
Twy. |
N-m; |
n wy |
, 1/min; |
y, st. | ||
|
OBLICZA |
SIĘ: | ||||||
|
1. |
Moc |
na walc wyjściowym | |||||
|
LA. |
P«y- |
Pwy‘ ^wy |
/1000, |
kW. | |||
|
l.B. |
P wy~ |
7^-y1 CJ wy |
/1000, |
kW. | |||
|
l.C. |
Pwy |
7\»y' JJ wy |
/9550, |
kW. | |||
9. Rzeczywiste przełożenie poszczególnych stopni układu napadowego dobiera się u2av{, — w taki spo
sób, żeby U0=ll\-U2-Uy-(dokładność -3 znaki po przecinku).
du napędowego, którego wyniki wprowadza się do tablicy Pj«-Pj' 7). kW
(Ż-l.2.3...),
7} = 9550P>//J,.
i)j*i -nj/u, 1/min Tj^TyU J). Nm
lub
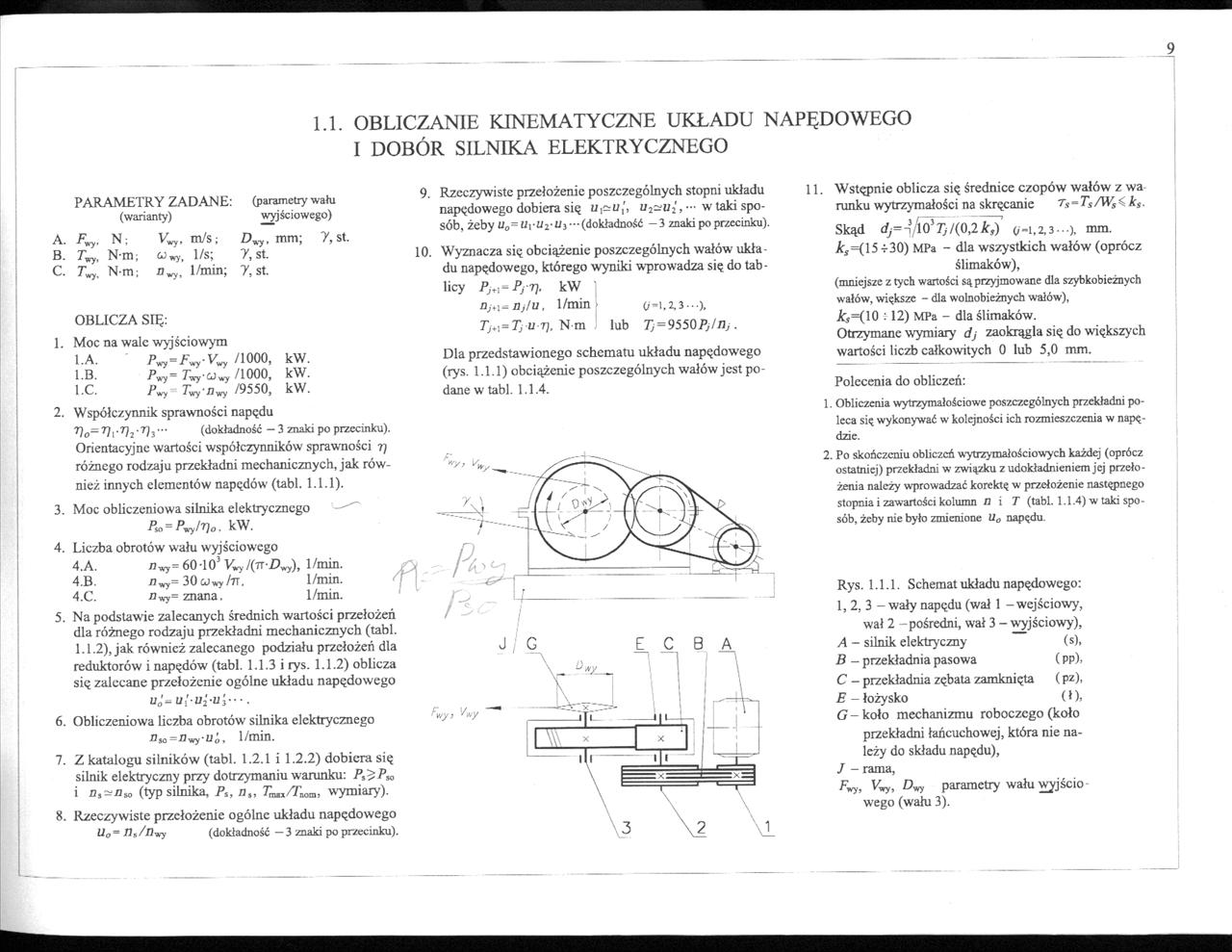
Dla przedstawionego schematu układu napędowego (rys. 1.1.1) obciążenie poszczególnych walów jest podane w tabl. 1.1.4.
2. Współczynnik sprawności napędu
"Ho-7Ir7)? 7)}"' (dokładność - 3 znaki po przecinku).
Orientacyjne wartości współczynników sprawności ?) różnego rodzaju przekładni mechanicznych, jak również innych elementów napędów (tabl. 1.1.1).
3. Moc obliczeniowa silnika elektrycznego
P*0~ Pwy/Vo. kW.
4. Liczba obrotów wału wyjściowego tj^7=60 103 Y^ HTT-D^y), 1/min.
r— 30 cj wy /tt. 1/min.
znana. 1/min.
5. Na podstawie zalecanych średnich wartości przełożeń dla różnego rodzaju przekładni mechanicznych (tabl. 1.1.2), jak również zalecanego podziału przełożeń dla reduktorów i napędów (tabl. 1.1.3 i rys. 1.1.2) oblicza się zalecane przełożenie ogólne układu napędowego
uJmi/rityUr".
6. Obliczeniowa liczba obrotów silnika elektrycznego
nM=nWy-u;i, l/min.
7. Z katalogu silników (tabl. 1.2.1 i 1.2.2) dobiera się
silnik elektryczny przy dotrzymaniu warunku: P,^Pm i (typ silnika, Pt, n%, T^/T^, wymiary)-
8. Rzeczywiste przełożenie ogólne układu napędowego
U0 = Tl*/U wy (dokładność — 3 znaki po pr/eemku).
|
4.A. |
nwy |
|
4.B. |
Hycy |
|
4.C. |
Jlwy |
*

|
Y /----v V Y • )j | |
|
E C B .A | |
|
\ | |
|
rrn j | |
|
1 * 1 ii. |
1 ___i—. |
11. Wstępnie oblicza się średnice czopów wałów z wa runku wytrzymałości na skręcanie ts-TsAVs^ ks.
Skąd rf,=-i/io5^/<0.2*^7 (,-1.13...). mm. /:,=(15r30) MPa - dla wszystkich wałów (oprócz ślimaków),
(mniejsze z tych wartości są przyjmowane dla szybkobieżnych wałów, większe - dla wolnobieżnych wałów), ks={ 10 : 12) MPa - dla ślimaków.
Otrzymane wymiary' dj zaokrągla się do większych wartości liczb całkowitych 0 lub 5,0 mm.
Polecenia do obliczeń:
1. Obliczenia wytrzymałościowe poszczególnych przekładni poleca się wykonywać w kolejności ich rozmieszczenia w napędzie.
2. Po skończeniu obliczeń wytrzymałościowych każdej (oprócz ostatniej) przekładni w związku z udokładnieniem jej przełożenia należy wprowadzać korektę w przełożenie następnego stopnia i zawartości kolumn n i T (tabl. 1.1.4) w taki sposób, żeby nie było zmienione U0 napędu.
Rys. 1.1.1. Schemat układu napędowego: 1, 2, 3 - wały napędu (wał 1 - wejściowy, wał 2 pośredni, wał 3 - wyjściowy),
A - silnik elektryczny (s),
B - przekładnia pasowa ( pp)>
C - przekładnia zębata zamknięta (pz),
E - łożysko (1)»
G - koło mechanizmu roboczego (koło przekładni łańcuchowej, która nie należy do składu napędu),
J - rama,
Fwy, Vwy, Dwy parametry wału wyjśćio wego (wału 3).
Wyszukiwarka
Podobne podstrony:
009 3 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO 5. Uj= Ill-Ui-Uy-
kurmaz009 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO PARAMETRY ZAD
1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO i DOBÓR SILNIKA ELEKTRYCZNEGO PARAMETRY
63459 kurmaz009 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO PARAMET
Str011 (7) 11 -2. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO, wg [5, 15
IMG00011 112. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO, wg [5, 15, 37
obliczyć moment przekazany na koła jezdne, nakreślić schemat kinematyczny układu napędowego z
Mechanika układu korbowego. Kinematyka układu korbowo-tłokowego silnika. Siły gazowe i bezwładności.
Scan0101 /M-.iUm swoje zalety. Podzespoły układu napędowego (przekształtnik, silnik, dławi-i wt jsri
Jednostka napędowa • 36V silnik elektryczny prądu stałego o mocy 2.1 kW •
24 luty 07 (139) Sterowanie parametrami kinematycznymi układu napędowego można przeprowadzać różnymi
więcej podobnych podstron