kurmaz009
1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO
PARAMETRY ZADANE: (parametry wału
(warianty) wyjściowego)
|
A. |
F * wy> |
N: |
v r wy > |
m/s ; |
D^y, mm; |
|
B. |
T 1 WYi |
N-m; |
03 wy, |
1/s; |
7, st. |
|
C. |
T 1 wy, |
N-m; |
^ wy 5 |
1/min; |
7j st. |
|
4.A. |
60-103 |
1/min. |
|
4.B. |
f) yjy = 30 CJ Wy /TT, |
1/min. |
|
4.C. |
•&wy~ znana, |
1/min, |
J G

OBLICZA SIĘ:
1. Moc na wale wyjściowym
LA. /1000’ kW-
l.B. p^y = 7V^ /1000, kW.
l.C. Pwy= Ty,-y*nwy /9550, kW.
2. Współczynnik sprawności napędu Vo-rIi-1l2'rl3“’ (dokładność — 3 znaki po przecinku). Orientacyjne wartości współczynników sprawności j] różnego rodzaju przekładni mechanicznych, jak również innych elementów napędów (tabl. 1.1.1).
3. Moc obliczeniowa silnika elektrycznego
kW.
4. Liczba obrotów wału wyjściowego
5. Na podstawie zalecanych średnich wartości przełożeń dla różnego rodzaju przekładni mechanicznych (tabl. 1.1.2), jak również zalecanego podziału przełożeń dla reduktorów' i napędów (tabl. 1.1.3 i rys. 1.1.2) oblicza się zalecane przełożenie ogólne układu napędowego
Uj- U{-U2-Uy“ .
6. Obliczeniowa liczba obrotów silnika elektrycznego
nso=avy-uó, 1/min.
7. Z katalogu silników (tabl. 1.2.1 i 1.2.2) dobiera się silnik elektryczny przy dotrzymaniu warunku: P$^PS0 i n3^nso (typ silnika, Ps, ns, T^/T^, wymiary).
8. Rzeczywiste przełożenie ogólne układu napędowego
U0 - U*/.12wy (dokładność — 3 znaki po przecinku).
9. Rzeczywiste przełożenie poszczególnych stopni układu napędowego dobiera się u^u'v , ••• w taki spo
sób, żeby lt0= Ui-U2-u3---(dokładność —3 znaki po przecinku).
10. Wyznacza się obciążenie poszczególnych wałów układu napędowego, którego wyniki wprowadza się do tab -
licy PjH= Pj-7], kW
ą, i i = iij/u, 1/min ;> (/=', 2, 3...),
T,~ =Tj u Tj, N m lub 7}=9550/>;//!, .
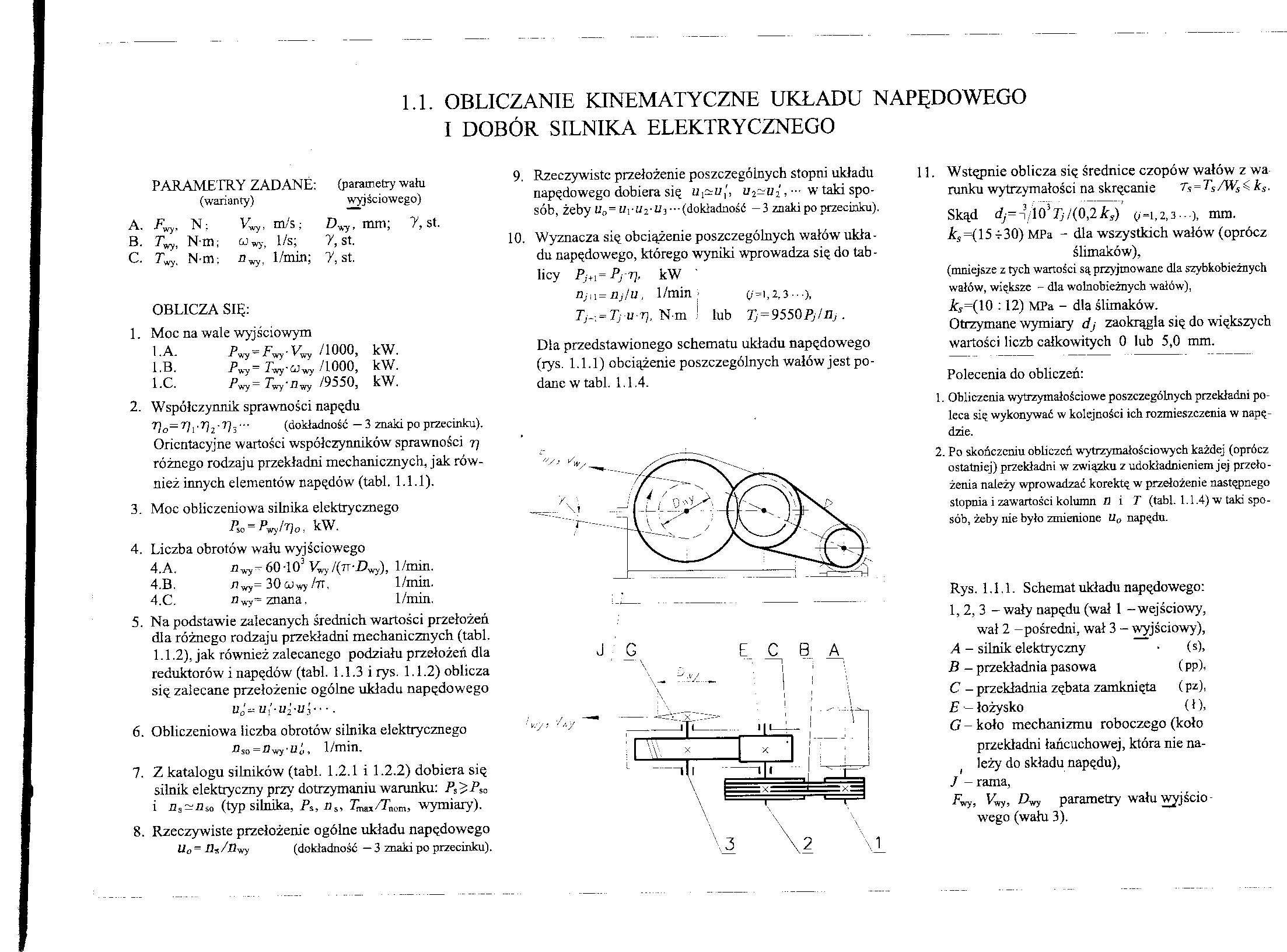
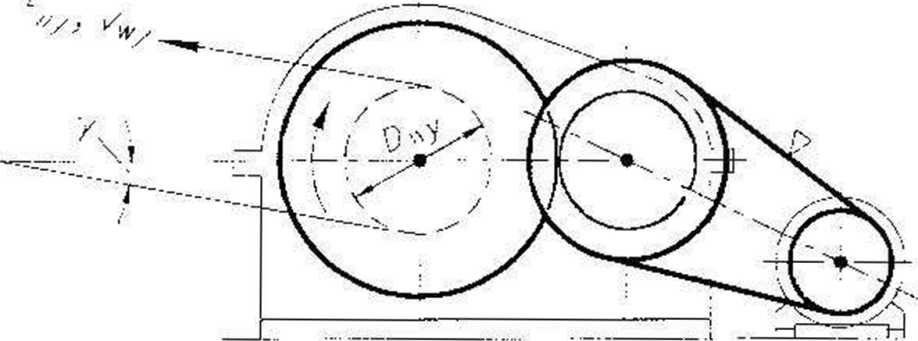
Dla przedstawionego schematu układu napędowego (rys. 1.1.1) obciążenie poszczególnych wałów jest podane w tabl. 1.1.4.
E C B A
v-v; v*y
11. Wstępnie oblicza się średnice czopów wałów z warunku wytrzymałości na skręcanie A = Ts AVS śks.
Skąd dj = n, 1037}/(0,2ks) (,=1,2,3..), mra. ks=(\5 430) MPa - dla wszystkich wałów (oprócz
ślimaków),
(mniejsze z tych wartości są przyjmowane dla szybkobieżnych wałów, większe - dla wolnobieżnych wałów), ks=( 10 :12) MPa - dla ślimaków.
Otrzymane wymiary dj zaokrągla się do większych wartości liczb całkowitych 0 lub 5,0 mm.
Polecenia do obliczeń:
1. Obliczenia wytrzymałościowe poszczególnych przekładni poleca się wykonywać w kolejności ich rozmieszczenia w napędzie.
2. Po skończeniu obliczeń wytrzymałościowych każdej (oprócz ostatniej) przekładni w związku z udokładnieniem jej przełożenia należy wprowadzać korektę w przełożenie następnego stopnia i zawartości kolumn n i T (tabl. 1.1.4) w taki sposób, żeby nie było zmienione U0 napędu.
Rys .1.1.1. S chemat układu napędowego: 1,2, 3 - wały napędu (wał 1 -wejściowy, wał 2 -pośredni, wał 3 - wyjściowy), A - silnik elektryczny ■ (s)>
B - przekładnia pasowa ( pp),
C - przekładnia zębata zamknięta (pz), E — łożysko (ł )>
G - koło mechanizmu roboczego (koło
przekładni łańcuchowej, która nie na-( leży do składu napędu),
J - rama,
Fwy, Avy parametry wału wyjściowego (wału 3).
Wyszukiwarka
Podobne podstrony:
63459 kurmaz009 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO PARAMET
009 3 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO PARAMETRY
1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO i DOBÓR SILNIKA ELEKTRYCZNEGO PARAMETRY
009 3 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO 5. Uj= Ill-Ui-Uy-
Str011 (7) 11 -2. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO, wg [5, 15
IMG00011 112. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO, wg [5, 15, 37
obliczyć moment przekazany na koła jezdne, nakreślić schemat kinematyczny układu napędowego z
Mechanika układu korbowego. Kinematyka układu korbowo-tłokowego silnika. Siły gazowe i bezwładności.
Scan0101 /M-.iUm swoje zalety. Podzespoły układu napędowego (przekształtnik, silnik, dławi-i wt jsri
Jednostka napędowa • 36V silnik elektryczny prądu stałego o mocy 2.1 kW •
24 luty 07 (139) Sterowanie parametrami kinematycznymi układu napędowego można przeprowadzać różnymi
więcej podobnych podstron