005

1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO
i DOBÓR SILNIKA ELEKTRYCZNEGO
PARAMETRY ZADANE
(warianty)
(dane walu wyjściowego)
1.9
|
1. |
Ewy M ; |
Vwy |
|
2, |
Twy [N.m]: | |
|
3. |
Twy [N.m]; |
n1Vy |
OBLICZA SIĘ :
LI Moc na wale wyjściowym
L L 1 P = Fwy‘Vwy/iOOO [kW]
1. L2 PWy= T^-Wwy/1000 [kW]
1.L3 Pwy=Twy'nwy/9550 [kW]
1.2 Współczynnik sprawności napadu
7)o“ ?)i' Ljz‘ (dokładność -2 znaki po przecinku).
Orientacyjne wartości współczynników sprawności T) różnego rodzaju przekładni mechanicznych, jak również innych elementów napadów podane w tablicy L1.1 str. 6
1.3 Moc obliczeniowa silnika elektrycznego Pso= Pwy/?7o [kW]
L4 Liczba obrotów wału wyjściowego
1.4.1 n^yy = 60 ‘ 10^’V^yy/( 7T'D-y^y)
1.4.2 Ilyyy ~ 30 ‘OÓyfy/Tł
Rzeczywiste przełożenie poszczególnych stopni uk- 1.
ładu napadowego dobiera sie Ut —Uj; U2— w taki sposób, żeby Uo~ Ui-Uj>U3...
Wyznacza się obciążenle^-poszczególnych wałów układu napędowego, które wprowadza się do tablicy Pj+i^Pj-T?
(J-l. 2. 3}
lub Tj+t = OSoG-Pj^i/nj-i.!
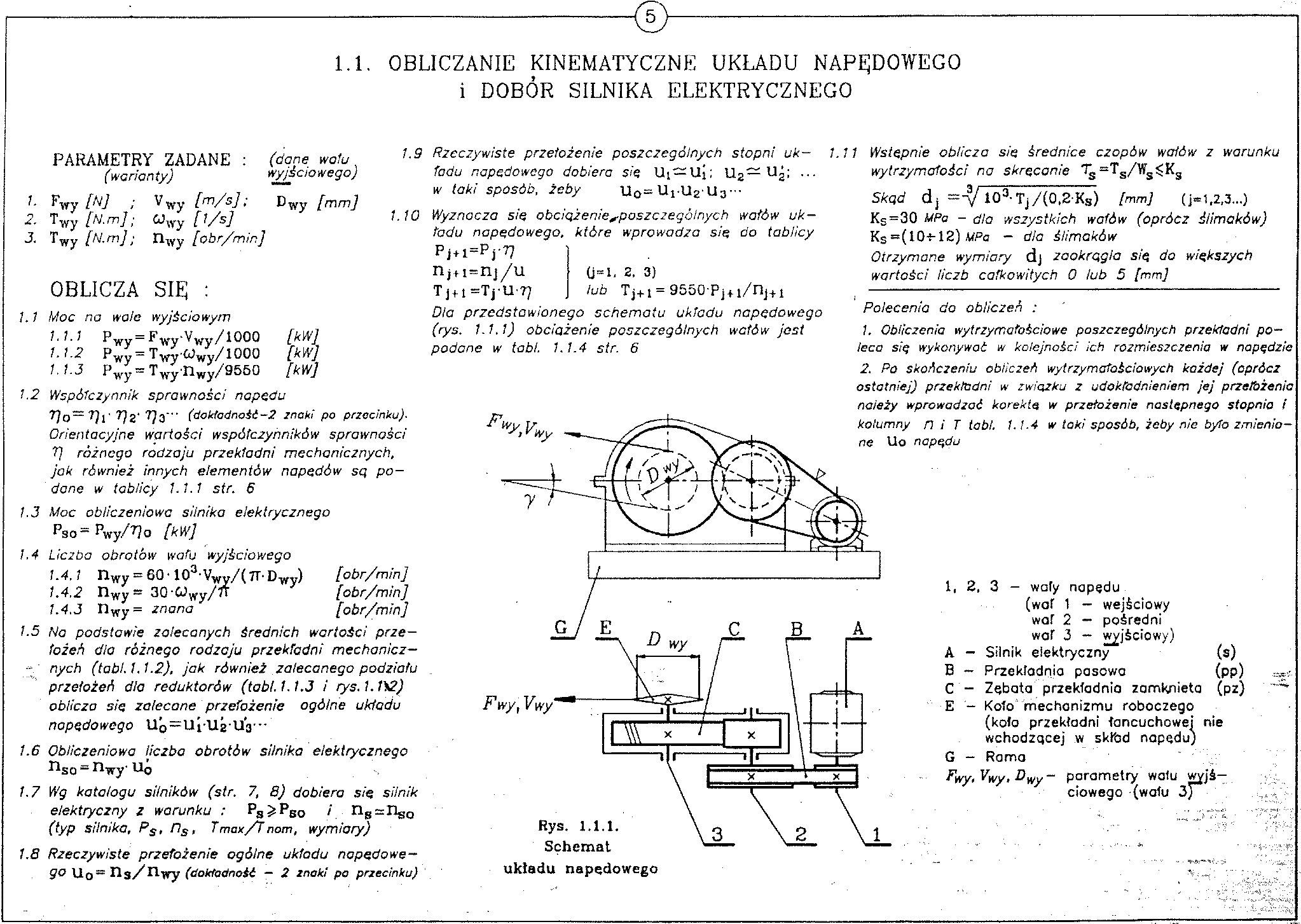
Dla przedstawionego schematu układu napędowego (rys. 1.1.1) obciążenie poszczególnych watów jest podane w tabl. 1.1.4 str. 6
ni+i=nj/u
T j f 1 =Tj U ?7
11 Wstępnie oblicza się średnice czopów wałów z warunku wytrzymałości na skręcanie *^=Ts/Ws^Kg
Skąd dj —-%/ iO3-Tj/(0,2*KS) [mm] (j*it2,3...) Ks=30 MPa - dla wszystkich wałów (oprócz ślimaków) Ks=(l0i-lS) MPa — dla ślimaków Otrzymane wymiary dj zaokrągla się do większych wartości liczb całkowitych 0 lub 5 [mm]
[obr/min] [obr/min] [obr/min ]
1.5 Na podstawie zalecanych średnich wartości prze— łożeń dla różnego rodzaju przekładni mechaniczny nych (tabl.L1.2), jak również zalecanego podziału
przełożeń dla reduktorów (tabł,1.L3 i rys. 1.1^2) oblicza się zalecane przełażenie ogólne układu nopędowego UÓ—Ut-Ug-uY"
1.6 Obliczeniowa liczba obrotów silnika elektrycznego 33sO = U<j
1.7 Wg katalogu silników (str. 7, 8) dobiera sie silnik
elektryczny z warunku : Ps ^ Pgo / ^s-^so
(typ silnika, P$, ns, Tmax/Tnom, wymiary)
1.8 Rzeczywiste przełożenie ogólne układu napadowego W o= II3/FL wy (dokładność — 2 znak! po przecinku)
1.4.3 nWy= znana
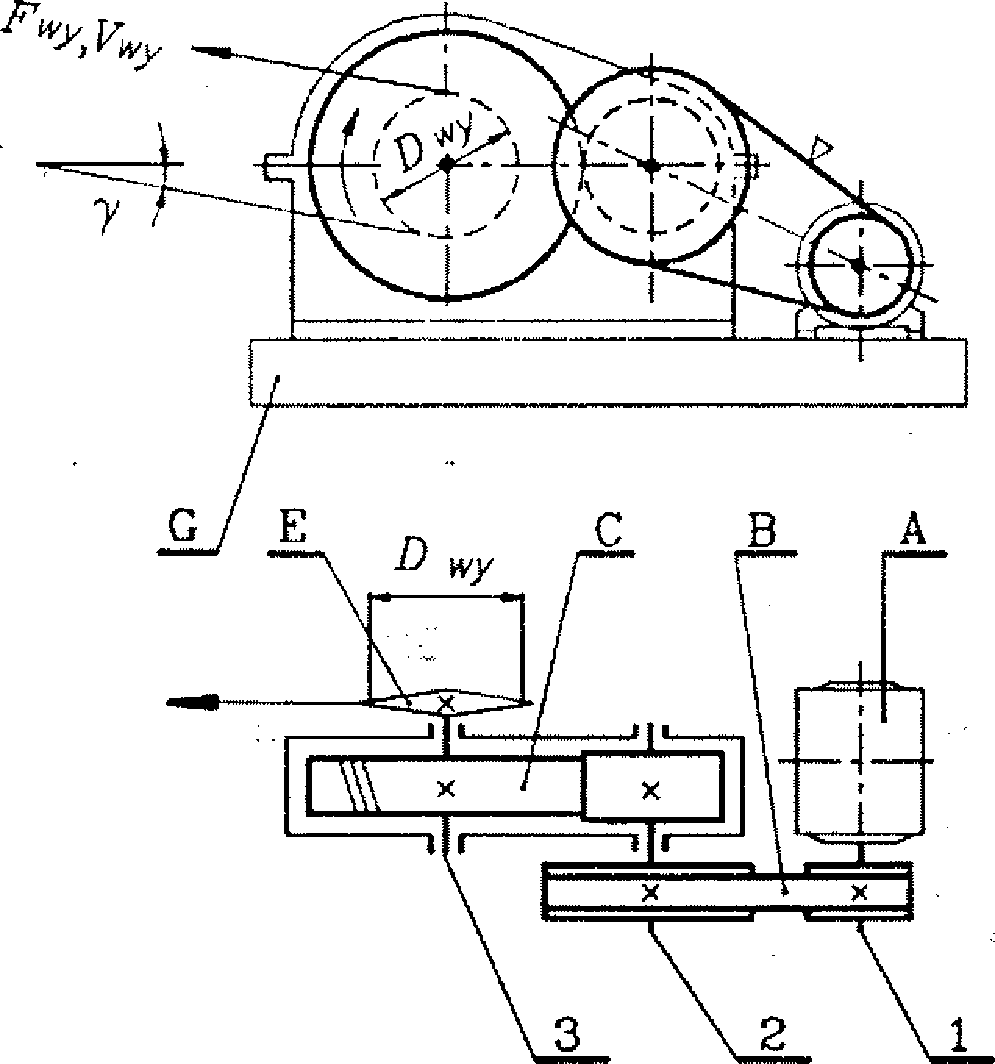
Fwy} Vwy
Rys. 1.1.1. Schemat
układu napadowego
Polecenia do obliczeń :
L Obliczenia wytrzymałościowe poszczególnych przekładni poleca się wykonywać w kolejności ich rozmieszczenia w napędzie
2. Po skończeniu obliczeń wytrzymałościowych każdej (oprócz ostatniej) przekładni w związku z ud o kła dr, le niem jej przetbżenia należy wprowadzać korekta w przełożenie następnego stopnia t kolumny n i T tabl. 1.1-4 w taki sposób, Żeby nie byfo zmienione Uo napędu
1, Z, 3 - woły napędu
(war 1 — wejściowy war 2 — pośredni war 3 — wejściowy)
A - Silnik elektryczny (5)
B — Przekładnia pasowa (pp)
C - Zębata przekładnia zamknięta (pz)
E - Koto mechanizmu roboczego
(kolo przekładni łańcuchowej nie wchodzącej w skłbd napędu)
G - Ramo
Fwy> Vwy* &wy ~ parametry walu wyjściowego {wału 3)
t-i.
Wyszukiwarka
Podobne podstrony:
009 3 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO PARAMETRY
kurmaz009 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO PARAMETRY ZAD
63459 kurmaz009 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO PARAMET
Str011 (7) 11 -2. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO, wg [5, 15
IMG00011 112. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO, wg [5, 15, 37
009 3 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO 5. Uj= Ill-Ui-Uy-
obliczyć moment przekazany na koła jezdne, nakreślić schemat kinematyczny układu napędowego z
24 luty 07 (139) Sterowanie parametrami kinematycznymi układu napędowego można przeprowadzać różnymi
Mechanika układu korbowego. Kinematyka układu korbowo-tłokowego silnika. Siły gazowe i bezwładności.
Scan0101 /M-.iUm swoje zalety. Podzespoły układu napędowego (przekształtnik, silnik, dławi-i wt jsri
Jednostka napędowa • 36V silnik elektryczny prądu stałego o mocy 2.1 kW •
więcej podobnych podstron