63459 kurmaz009
1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO
PARAMETRY ZADANE: (parametry wału
(warianty) wyjściowego)
|
A. |
F * WY’ |
N: |
V r wy j |
m/s ; |
D*y, mm; 7, st. |
|
B. |
T 1 WY1 |
N-m; |
cc wy, |
1/s; |
7, st. |
|
C. |
T 1 wy* |
N-m; |
-P wy, |
1/min; |
7, st. |
OBLICZA SIĘ:
1. Moc na wale wyjściowym
l.A. /1000, kW.
l.B. P^T^-u^y /1000, kW.
l.C. PViy=Tvy-nwy /9550, kW.
2. Współczynnik sprawności napędu Vo=rh-rl2'V3“‘ (dokładność — 3 znaki po przecinku). Orientacyjne wartości współczynników sprawności 77 różnego rodzaju przekładni mechanicznych, jak również innych elementów napędów (tabl. 1.1.1).
3. Moc obliczeniowa silnika elektrycznego
Po = P^yMo , kW.
4. Liczba obrotów wału wyjściowego
|
4.A. |
22*3^-60-10 Ky/(7r-D*y), |
1/min. |
|
4.B. |
/łWy= 30 Cd wy /7T, |
1/min. |
|
4.C. |
n wy= znana, |
1/min. |
5. Na podstawie zalecanych średnich wartości przełożeń dla różnego rodzaju przekładni mechanicznych (tabl. 1.1.2), jak również zalecanego podziału przełożeń dla reduktorów i napędów (tabl. 1.1.3 i rys. 1.1.2) oblicza się zalecane przełożenie ogólne układu napędowego
U0'« U,'-UyUy-- .
6. Obliczeniowa liczba obrotów silnika elektrycznego
JQSo=^wy -ul, 1/min.
7. Z katalogu silników (tabl. 1.2.1 i 1.2.2) dobiera się silnik elektryczny przy dotrzymaniu warunku: PS^PS0 i n3^nso (typ silnika, Ps, ns, 7^„/Tnom, wymiary).
8. Rzeczywiste przełożenie ogólne układu napędowego
Uo= 1}*/Hwy (dokładność — 3 znaki po przecinku).
9. Rzeczywiste przełożenie poszczególnych stopni układu napędowego dobiera się u^uj, ••• w taki spo
sób, Żeby U<>= Ur U2-W 3-"(dokładność - 3 znaki po przecinku).
10. Wyznacza się obciążenie poszczególnych wałów układu napędowego, którego wyniki wprowadza się do tablicy Pj+l=Pj-r], kW
nj,i = njlu, 1/min; (,-=1,2,3...),
7)-. = 7} u u, Nm lub Tj=9550PjJnj .
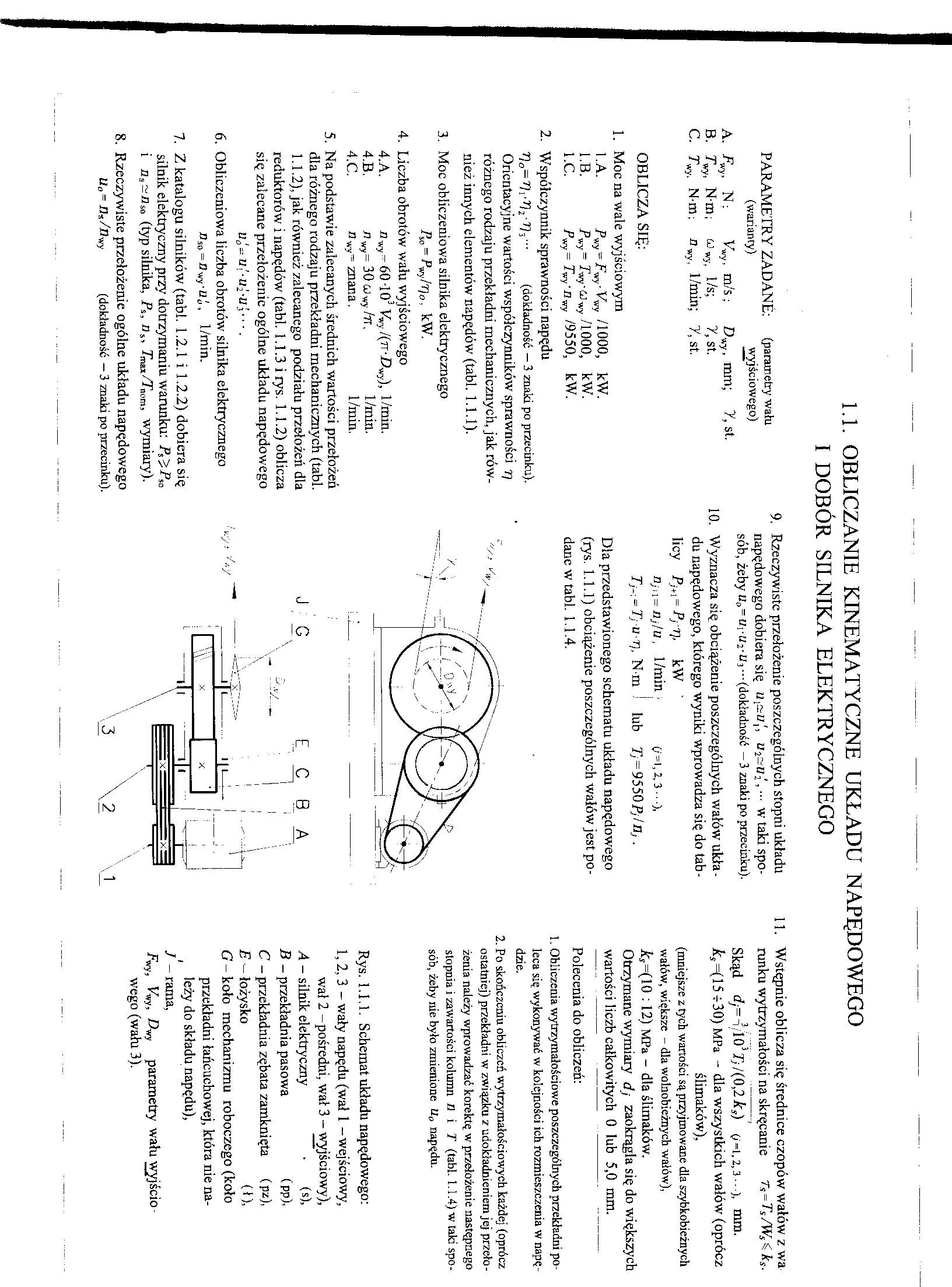
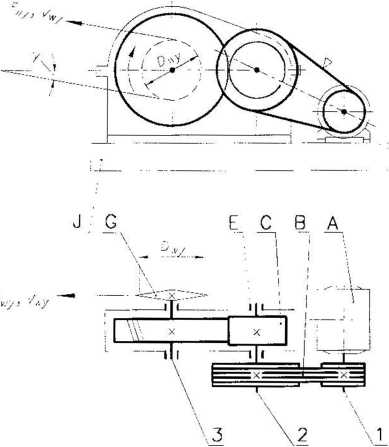
Dla przedstawionego schematu układu napędowego (rys. 1.1.1) obciążenie poszczególnych wałów jest podane w tabl. 1.1.4.
11. Wstępnie oblicza się średnice czopów wałów z wa runku wytrzymałości na skręcanie 7> = P /Ws 7 ks.
Skąd rfy=n/10*7}/(0,2Aj) (,=1,2,3 ■••), mm.
A, =(15 4-30) MPa - dla wszystkich wałów (oprócz ślimaków),
(mniejsze z tych wartości są przyjmowane dla szybkobieżnych wałów, większe - dla wolnobieżnych wałów),
Ar=(10 :12) MPa - dla ślimaków.
Otrzymane wymiary dj zaokrągla się do większych wartości liczb całkowitych 0 lub 5,0 mm.
Polecenia do obliczeń:
1. Obliczenia wytrzymałościowe poszczególnych przekładni poleca się wykonywać w kolejności ich rozmieszczenia w napędzie.
2. Po skończeniu obliczeń wytrzymałościowych każdej (oprócz ostatniej) przekładni w związku z udokładnieniem jej przełożenia należy wprowadzać korektę w przełożenie następnego stopnia i zawartości kolumn fl i T (tabl. 1.1.4) w taki sposób, żeby nie było zmienione ua napędu.
Rys. 1.1.1. Schemat układu napędowego: 1,2, 3 - wały napędu (wał 1 -wejściowy, wał 2 -pośredni, wał 3 - wyjściowy),
|
A - silnik elektryczny |
(s), |
|
B - przekładnia pasowa |
(pp), |
|
C - przekładnia zębata zamknięta |
(p4 |
|
E - łożysko |
(ł>. |
|
G - koło mechanizmu roboczego (koło | |
|
przekładni łańcuchowej, która f leży do składu napędu), |
nie na- |
|
J - rama, | |
|
7vy, VĘy, A*y parametry wału wyjścio | |
|
wego (wału 3). | |
Wyszukiwarka
Podobne podstrony:
kurmaz009 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO PARAMETRY ZAD
009 3 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO PARAMETRY
1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO i DOBÓR SILNIKA ELEKTRYCZNEGO PARAMETRY
009 3 1.1. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO 5. Uj= Ill-Ui-Uy-
Str011 (7) 11 -2. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO, wg [5, 15
IMG00011 112. OBLICZANIE KINEMATYCZNE UKŁADU NAPĘDOWEGO I DOBÓR SILNIKA ELEKTRYCZNEGO, wg [5, 15, 37
obliczyć moment przekazany na koła jezdne, nakreślić schemat kinematyczny układu napędowego z
Mechanika układu korbowego. Kinematyka układu korbowo-tłokowego silnika. Siły gazowe i bezwładności.
Scan0101 /M-.iUm swoje zalety. Podzespoły układu napędowego (przekształtnik, silnik, dławi-i wt jsri
24 luty 07 (139) Sterowanie parametrami kinematycznymi układu napędowego można przeprowadzać różnymi
a5* n5 Rys. 1. Schemat kinematyczny układu napędowego B.Dane*. Moknia dla układu. Zadanie IV. Dane.
więcej podobnych podstron