044 5
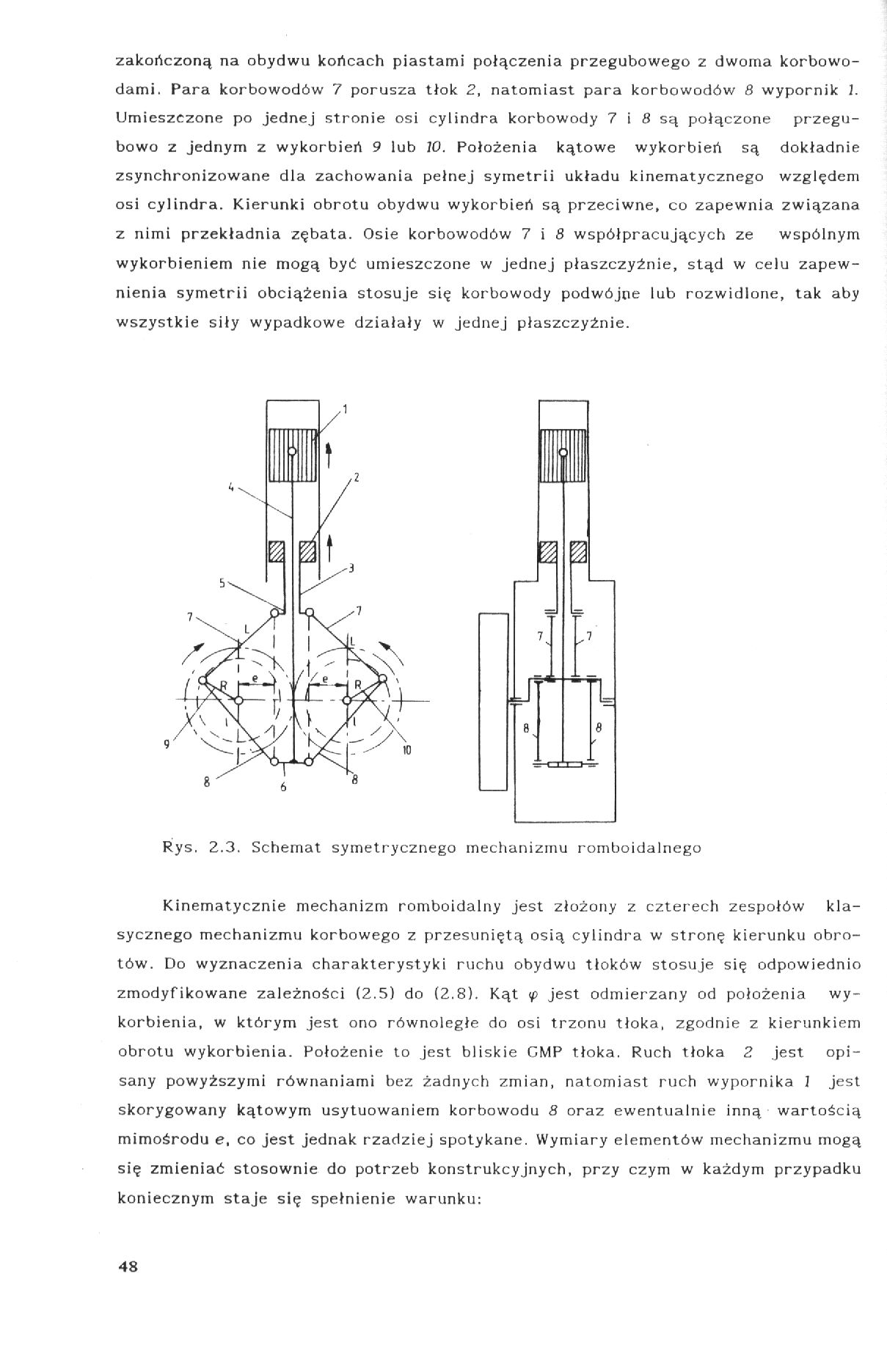
zakończoną na obydwu końcach piastami połączenia przegubowego z dwoma korbowo-dami. Para korbowodów 7 porusza tłok 2, natomiast para korbowodów 8 wypornik 1. Umieszczone po jednej stronie osi cylindra korbowody 7 i 8 są połączone przegubowo z jednym z wykorbień 9 lub 10. Położenia kątowe wykorbień są dokładnie zsynchronizowane dla zachowania pełnej symetrii układu kinematycznego względem osi cylindra. Kierunki obrotu obydwu wykorbień są przeciwne, co zapewnia związana z nimi przekładnia zębata. Osie korbowodów 7 i 8 współpracujących ze wspólnym wykorbieniem nie mogą być umieszczone w jednej płaszczyźnie, stąd w celu zapewnienia symetrii obciążenia stosuje się korbowody podwójne lub rozwidlone, tak aby wszystkie siły wypadkowe działały w jednej płaszczyźnie.
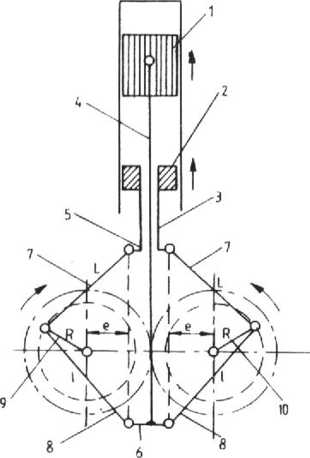
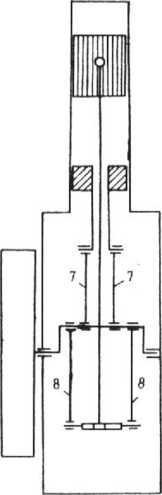
Rys. 2.3. Schemat symetrycznego mechanizmu romboidalnego
Kinematycznie mechanizm romboidalny jest złożony z czterech zespołów klasycznego mechanizmu korbowego z przesuniętą osią cylindra w stronę kierunku obrotów. Do wyznaczenia charakterystyki ruchu obydwu tłoków stosuje się odpowiednio zmodyfikowane zależności (2.5) do (2.8). Kąt <p jest odmierzany od położenia wy-korbienia, w którym jest ono równoległe do osi trzonu tłoka, zgodnie z kierunkiem obrotu wykorbienia. Położenie to jest bliskie CMP tłoka. Ruch tłoka 2 jest opisany powyższymi równaniami bez żadnych zmian, natomiast ruch wypornika 1 jest skorygowany kątowym usytuowaniem korbowodu 8 oraz ewentualnie inną wartością mimośrodu e, co jest jednak rzadziej spotykane. Wymiary elementów mechanizmu mogą się zmieniać stosownie do potrzeb konstrukcyjnych, przy czym w każdym przypadku koniecznym staje się spełnienie warunku:
48
Wyszukiwarka
Podobne podstrony:
IMAG1472 vtav>rMtv ftl»ltK . Motv Stj P CVNVłC ck »KlU otv są .Moki.jjjloiu na obydwu końcach Na
83481 P3041040 71. Połączenia zakładkom na śruby l nlły Y ■ - . / 1 Ryn.7 6 Połączenie przegubo
mech wytrz4 Dwa lekkie pręty AB i BC, połączone przegubowo z pionową ścianą na końcach A i C oraz wz
img039 2 Dachy 39 końcach oparte są przegubowo krótsze płatwie połączone na zamek ukośny. Przekroje
Str. 12 PROJEKT WYKONAWCZY Pary studzienek na końcach mostu połączone zostaną rurami a ściekająca do
Mechanika(8 a) b) F / f / i 77/^77 F/,=/ /,= na obu końcach przegubowo
Ciało podparte iia prętach zamocowanych przegubowo na obu końcach ( pietach przegubowych )-ciało szt
57 (227) wyznaczalnej przez zastosowanie jedynie połączeń przegubowych — niewrażliwej na nierównomie
Polecenia 3 1 Zad. 7 Dwa pręty połączone przegubowo ze sobą i z fundamentem, tworzą konstrukcję jak
55 (306) 1.7. Kratownice Dwa jednorodne pręty AB i BC są połączone przegubem B. Koniec A zamocowano
79421 z12 (8) Więzy wewnętrzne nałożone na pręty ramowe to ich połączenie przegubowi w punkcie C i ś
i6 w nazwy ulic. Ulice zakopiańskie zaopatrzone są tablicami z nazwami na obu końcach ulicy, a
img137 (11) oprowadzenie do techniki sieci neuronowych Po ustaleniu się sygnałów wyjściowych na obyd
więcej podobnych podstron