153 3
300
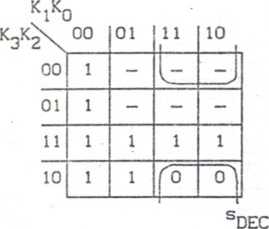
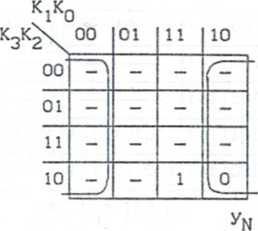
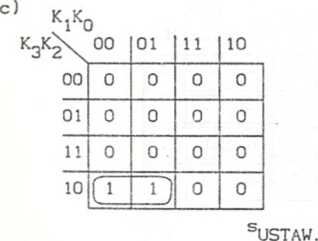
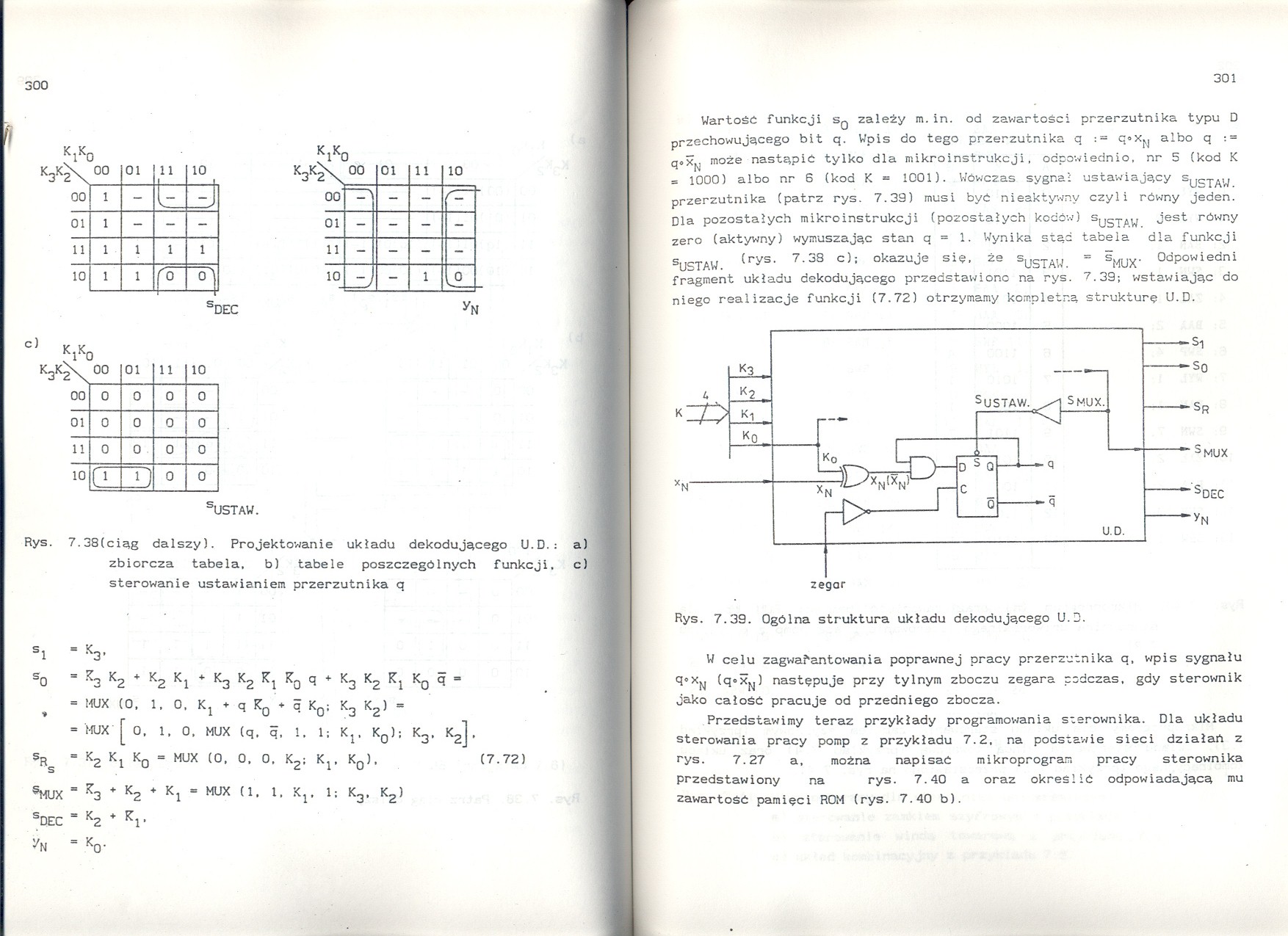
Rys. 7.38(ciąg dalszy). Projektowanie układu dekodującego U.D.: a) zbiorcza tabela. b) tabele poszczególnych funkcji. c) sterowanie ustawianiem przerzutnika q
S1 " K3-
|
s0 = I3 K2 * |
K2 |
K1 + K3 |
K2 ^1 |
*0 |
q + |
K3 |
K2 ^1 |
n Itr 0 sz |
|
= MUX (0, |
1, |
0, Kj + |
q !^0 |
* Ę |
Kq; |
K3 |
k2) « | |
|
= MUX [ 0, |
, 1, |
0, MUX |
(q. a |
\ ( |
, 1; |
Kl- |
K0); |
k3. k2 |
|
5rs = K2 |
Kt KQ « MUX |
(0. |
0, 0. K2; Kj. |
K0). |
(7.72) |
|
®MUX = ^3 |
+ K2 + K1 " |
MUX |
(1. 1. :<J. 1; |
K3. K2) | |
|
SDEC “ KZ yN = K0' |
♦ |
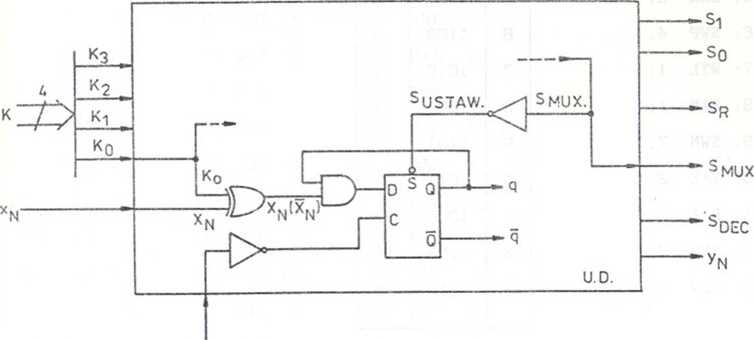
Wartość funkcji Sq zależy m.in. od zawartości przerzutnika typu D przechowującego bit q. Wpis do tego przerzutnika q := q»x^ albo q : = q«><^ może nastąpić tylko dla mikroinstrukcji, odpowiednio, nr 5 (kod K = 1000) albo nr 6 (kod K = 1001). Wówczas sygnał ustawiający SjjctaW przerzutnika (patrz rys. 7.39) musi być nieaktywny czyli równy jeden. Dla pozostałych mikroinstrukcji (pozostałych kodów) SjjSTAW jest równy zero (aktywny) wymuszając stan q = 1. Wynika stąd tabela dla funkcji
SIFTAW. (rys- 7-38 C): okazuJe sid> że sUSTAW. = ®MUX' 0dPowiedni
fragment układu dekodującego przedstawione na rys. 7.39; wstawiając do
niego realizacje funkcji (7.72) otrzymamy kompletną strukturę U.D.
zegar
Rys. 7.39. Ogólna struktura układu dekodującego U.D.
W celu zagwańantowania poprawnej pracy przerzutnika q, wpis sygnału q«xN (q°xN) następuje przy tylnym zboczu zegara podczas, gdy sterownik jako całość pracuje od przedniego zbocza.
Przedstawimy teraz przykłady programowania sterownika. Dla układu sterowania pracy pomp z przykładu 7.2, na podstawie sieci działań z cys. 7.27 a, można napisać mikroprograr, pracy sterownika przedstawiony na rys. 7.40 a oraz określić odpowiadającą mu zawartość pamięci ROM (rys. 7.40 b).
Wyszukiwarka
Podobne podstrony:
176 2 346 c)X1 X Rys. 9.l0(ciąg dalszy). Schemat układu sterowania pompami (przykład 9.7) Jest ona i
Część 10: Wzorcowa specyfikacja konstrukcji Tabela 2.1 (Ciąg dalszy) Projektowanie i inżynieria
2tom149 5. MASZYNY ELEKTRYCZNE 300 Rys. 5.38. Schemat połączeń uzwojeń indukcyjnego regulatora
ksiazka(143) Ciąg dalszy tabl. 7-1 Numer bezpiecznika na rys. 7-1 Obwody zabezpieczane 9 /9
ksiazka(153) Ciąg dalszy tabl. 7-4 Połączenie Oporność, ii masa alternatora - minus
20076 skanuj0160 (11) 300 6. Cieślar 300 6. Cieślar 7.18. [WM-15] Dla układu statycznego podanego na
286 287 286 r—» 3.13. Graf projektowanego układu przedstawiono na rys. R.23. Kodując a-00, ji -
300 Wprowadzenie do japońskich wykresów świecowych Tabela 13.1 (ciąg dalszy) (d) Formacje młotów i
043 3 43 1.5.4.2. PROJEKTOWE OBLICZANIE WAŁÓW [7], [21], [34], [37], [38] (na przykładzie wału 3 ukł
4_,y i 1.5 .4.2. PROJEKTOWE OBLICZANIE WAŁÓW [7], [21], [34], [37], [38] (na przykładzie wału 3 ukła
057 4 110 a)X1 X2 clock elear Rys. 5.50. Patrz ciąg dalszy 5.50(ciąg dalszy). 5.29
095 3 186 x a) Y Rys. S.22. Patrz ciąg dalszy 6.3,2. Rozdzielacze warunkowe dla liniowych sieci
18957 Untitled Scanned 38 - 76 - rys,3-19®, tablice przejść i wyjść układu Mealy*«ge - na rys.3.19b,
Scan30005 Rys. 9.28. Projektowanie układu sterowania wiertarki oraz przyrządu mocującego i przemiesz
więcej podobnych podstron