1tom220
-442
8. AUTOMATYKA I ROBOTYKA
1580
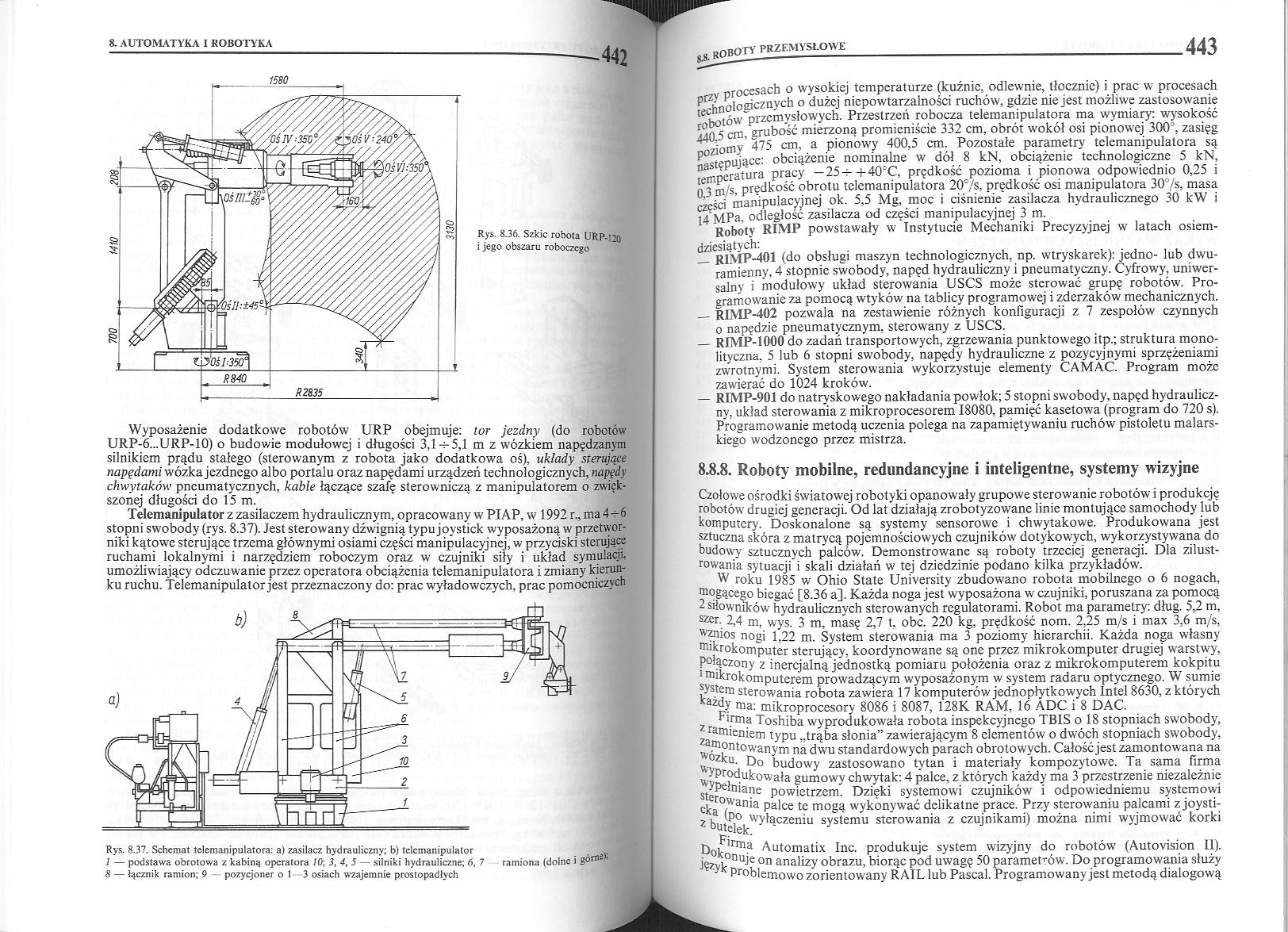
Rys. 8.36. Szkic robota URPoij i jego obszaru roboczego
Wyposażenie dodatkowe robotów URP obejmuje: tur jezdny (do robotów URP-6...URP-10) o budowie modułowej i długości 3,1 — 5,1 m z wózkiem napędzanym silnikiem prądu stałego (sterowanym z robota jako dodatkowa oś), układy sterujące napędami wózka jezdnego albo portalu oraz napędami urządzeń technologicznych, napędy chwytaków pneumatycznych, kable łączące szafę sterowniczą z manipulatorem o zwiększonej długości do 15 m.
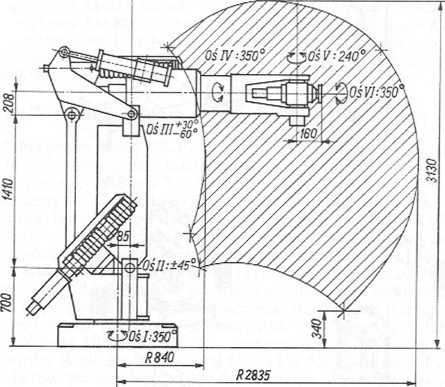
Tełemanipulator z zasilaczem hydraulicznym, opracowany w PIAP, w 1992 r.,ma4-h6 stopni swobody (rys. 8.37). Jest sterowany dźwignią typu joystick wyposażoną w przetworniki kątowe sterujące trzema głównymi osiami części manipulacyjnej, w przyciski sterujące ruchami lokalnymi i narzędziem roboczym oraz w czujniki siły i układ symulacji, umożliwiający odczuwanie przez operatora obciążenia tclemanipulatora i zmiany kierunku ruchu. Tełemanipulator jest przeznaczony do: prac wyładowczych, prac pomocniczych

ramiona (dolne i
Rys. 8.37. Schemat telemanipulatora: a) zasilacz hydrauliczny; b) tełemanipulator 1 — podstawa obrotowa z kabiną operatora 10; 3, 4, 5 silniki hydrauliczne; 6, 7 8 — łącznik ramion; 9 pozycjoner o 1 3 osiach wzajemnie prostopadłych
nrocesach o wysokiej temperaturze (kuźnie, odlewnie, tłocznie) i prac w procesach ^linoloaicznych o dużej niepowtarzalności ruchów, gdzie nie jest możliwe zastosowanie 'botów przemysłowych. Przestrzeń robocza telemanipulatora ma wymiary: wysokość Sn 5 cm, grubość mierzoną promieniście 332 cm, obrót wokół osi pionowej 300’, zasięg ziomv' 475 cm, a pionowy 400,5 cm. Pozostałe parametry telemanipulatora są •^stepujące: obciążenie nominalne w dół 8 kN, obciążenie technologiczne 5 kN, fmperatura pracy — 25-b+40°C, prędkość pozioma i pionowa odpowiednio 0,25 i *e3 ^,/s prędkość obrotu telemanipulatora 20°/s, prędkość osi manipulatora 307s, masa części manipulacyjnej ok. 5,5 Mg, moc i ciśnienie zasilacza hydraulicznego 30 kW i 14 MPa, odległość zasilacza od części manipulacyjnej 3 m.
Roboty RIMP powstawały w Instytucie Mechaniki Precyzyjnej w latach osiemdziesiątych:
__ Ri>iP-401 (do obsługi maszyn technologicznych, np. wtryskarek): jedno- lub dwu-ramienny, 4 stopnie swobody, napęd hydrauliczny i pneumatyczny. Cyfrowy, uniwersalny i modułowy układ sterowania USCS może sterować grupę robotów. Programowanie za pomocą wtyków na tablicy programowej i zderzaków mechanicznych.
_RIMP-402 pozwala na zestawienie różnych konfiguracji z 7 zespołów czynnych
o napędzie pneumatycznym, sterowany z USCS.
— RIMP-1000 do zadań transportowych, zgrzewania punktowego itp.; struktura monolityczna, 5 lub 6 stopni swobody, napędy hydrauliczne z pozycyjnymi sprzężeniami zwrotnymi. System sterowania wykorzystuje elementy CAMAC. Program może zawierać do 1024 kroków.
— RIMP-901 do natryskowego nakładania powłok; 5 stopni swobody, napęd hydrauliczny, układ sterowania z mikroprocesorem 18080, pamięć kasetowa (program do 720 s). Programowanie metodą uczenia polega na zapamiętywaniu ruchów pistoletu malarskiego wodzonego przez mistrza.
8.8.8. Roboty mobilne, redundancyjne i inteligentne, systemy wizyjne
Czołowe ośrodki światowej robotyki opanowały grupowe sterowanie robotów i produkcję robotów drugiej generacji. Od lat działają zrobotyzowanc linie montujące samochody lub komputery. Doskonalone są systemy sensorowe i chwytakowe. Produkowana jest sztuczna skóra z matrycą pojemnościowych czujników dotykowych, wykorzystywana do budowy sztucznych palców. Demonstrowane są roboty trzeciej generacji. Dla zilustrowania sytuacji i skali działań w tej dziedzinie podano kilka przykładów'.
W roku 1985 w Ohio State University zbudowano robota mobilnego o 6 nogach, mogącego biegać [8.36 a]. Każda noga jest wyposażona w czujniki, poruszana za pomocą 2 siłowników hydraulicznych sterowanych regulatorami. Robot ma parametry: dług. 5,2 m, szer. 2,4 rn, wys. 3 m, masę 2,7 t, obc. 220 kg, prędkość nom. 2,25 m/s i max 3,6 m/s, wznios nogi 1,22 m. System sterowania ma 3 poziomy hierarchii. Każda noga własny ■tnkrokomputer sterujący, koordynowane są one przez mikrokomputer drugiej warstwy, połączony z inercjalną jednostką pomiaru położenia oraz z mikrokomputerem kokpitu mikrokomputerem prowadzącym wyposażonym w system radaru optycznego. W sumie ystera sterowania robota zawiera 17 komputerów jednopłytkowych Intel 8630, z których Kazoy ma: mikroprocesory 8086 i 8087, 128K RAM, 16 ADC i 8 DAC.
ster 'niaae Pow'ctrzem. Dzięki systemowi czujników i odpowiedniemu systemowi Cjca°,War|ia palce tc mogą wykonywać delikatne prace. Przy sterowaniu palcami z joysti-i b wyłączeniu systemu sterowania z czujnikami) można nimi wyjmować korki
r mną Toshiba wyprodukowała robota inspekcyjnego TBIS o 18 stopniach swobody, 7 *mien*em typu „trąba słonia” zawierającym 8 elementów o dwóch stopniach swobody, w i2?ntowanym na dwu standardowych parach obrotowych. Całość jest zamontowana na wvn i budowy zastosowano tytan i materiały kompozytowe. Ta sama firma Wypet-Uk°wała gumowy chwytak: 4 palce, z których każdy ma 3 przestrzenie niezależnie
D0r!rma Automatix Inc. produkuje system wizyjny do robotów (Autovision II). on analizy obrazu, biorąc pod uwagę 50 parametrów. Do programowania służy ' Pr°blemowo zorientowany RAIŁ lub Pascal. Programowany jest metodą dialogową
Wyszukiwarka
Podobne podstrony:
Pomiary Automatyka Robotyka 9/2008 rys. 3a. Ponadto dla realizacji ruchu w stopniu swo- obrotnicę wz
1tom209 8. AUTOMATYKA I ROBOTYKA 420 Rys. 8.17. Identyfikacja metodą odpowiedzi skokowej: a) obiektó
3tom057 Z WYTWARZANIE ENERGII ELEKTRYCZNEJ 116 Rys. 2.36. Szkic skraplacza powierzchniowego wodnego
Rys. 1.2: Rozkład podziałów na : Automatyka i robotyka
1tom203 -408 8. AUTOMATYKA I ROBOTYKA8.2. Elementy układów regulacji W URA (rys. 8.5) — oprócz urząd
1tom205 8. AUTOMATYKA 1 ROBOTYKA412 Współczesne regulatory impulsowe są mikroprocesorowe (rys. 8.11)
1tom211 -424 8. AUTOMATYKA I ROBOTYKA Rys. 8.21. Wskaźniki jakości regulacji; prze regulowanie * = A
1tom216 -434 8. AUTOMATYKA I ROBOTYKA Symulowany układ, np. regulator PI z nasyceniem (rys 8.28a), n
1tom218 -438 8. automatyka i robotyka Rys. 8.32. Serwomechanizmy robotów a) serwom
1tom221 8. AUTOMATYKA I ROBOTYKA444 za pomocą klawiatury i monitora CRT. Sensory stanowią 2 kamery p
P1080184 (3) Rozwój robotyki 11.1. Rys historyczny rozwoju robotyki Pierwsze automaty pojawiły się j
Semestr 3 kierunek AUTOMATYKA i ROBOTYKA g/tydz sem. 3 w ć I £ ects egz Język
Semestr 5 - strumień: Systemy automatyki kierunek AUTOMATYKA i ROBOTYKA strumień SYSTEMY
Semestr 6 - strumień: Systemy decyzyjne kierunek AUTOMATYKA i ROBOTYKA strumień SYSTEMY
więcej podobnych podstron