214 215
214 Metody wielokryterialne
4.4.5. Wykorzystanie punktu idealnego
Generując w punkcie 4.4.1 rozwiązania sprawne za pomocą jednej funkcji celu, rozwiązywaliśmy kolejne zadania 2, dla / = 1, ..., m, gdzie w oznacza liczbę rozpatrywanych kryteriów. Oznaczymy przez y° optymalną wartość funkcji celu, otrzymaną z rozwiązania zadania Z,. W przestrzeni kryterialnej możemy określić punki Y (y*, .... nazywany rozwiązaniem idealnym. Punktowi temu zazwyczaj nie odpowiada w przestrzeni decyzyjnej żadne rozwiązanie dopuszczalne. Pomimo \ to w przestrzeni kryterialnej może być on wykorzystany przez decydenta jako punkt i odniesienia w stosunku do tych rozwiązań, które są dla niego osiągalne.
Określając — w odpowiadający rozpatrywanemu problemowi sposób — odległość między punktami w przestrzeni kryterialnej, można szukać takiego rozwiązania, które jest położone najbliżej punktu idealnego. Przy odpowiednim określeniu sposobu mierzenia odległości między punktami otrzymujemy rozwiązanie sprawne. Geometrycznie sposób takiego postępowania ilustruje kolejny przykład. Otrzymujemy w ten sposób zadanie programowania kompromisowego.
Przykład 4.9
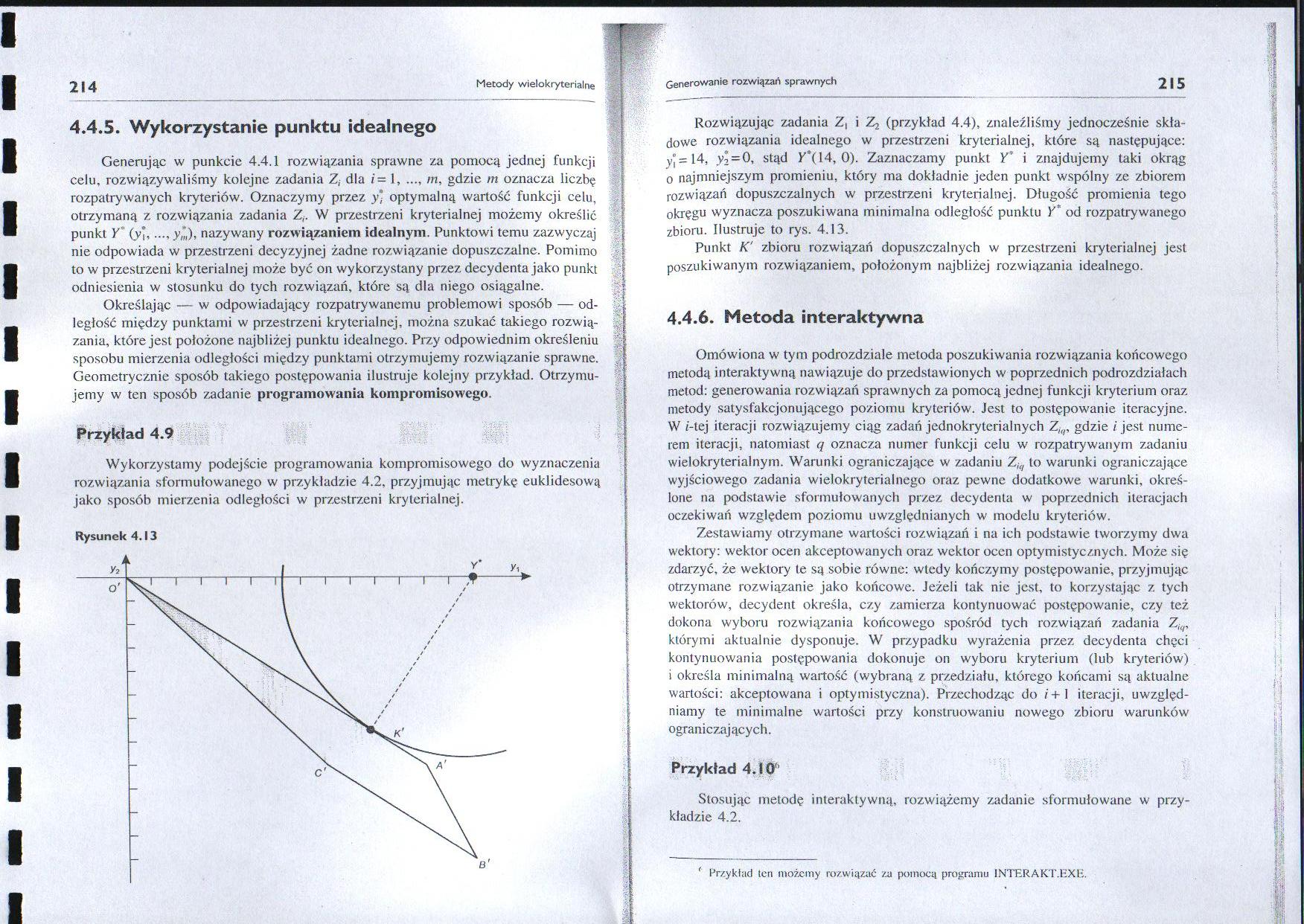
Wykorzystamy podejście programowania kompromisowego do wyznaczenia rozwiązania sformułowanego w przykładzie 4.2, przyjmując metrykę euklidesową jako sposób mierzenia odległości w przestrzeni kryterialnej.
Rozwiązując zadania Z, i Z, (przykład 4.4), znaleźliśmy jednocześnie składowe rozwiązania idealnego w przestrzeni kryterialnej, które są następujące: =14, yl = 0, stąd V'*( 14, 0). Zaznaczamy punkt Z' i znajdujemy taki okrąg
0 najmniejszym promieniu, który ma dokładnie jeden punkt wspólny ze zbiorem rozwiązań dopuszczalnych w przestrzeni kryterialnej. Długość promienia tego okręgu wyznacza poszukiwana minimalna odległość punktu Y* od rozpatrywanego zbioru. Ilustruje to rys. 4.13.
Punkt K‘ zbioru rozwiązań dopuszczalnych w przestrzeni kryterialnej jest poszukiwanym rozwiązaniem, położonym najbliżej rozwiązania idealnego.
4.4.6. Metoda interaktywna
Omówiona w tym podrozdziale metoda poszukiwania rozwiązania końcowego metodą interaktywną nawiązuje do przedstawionych w poprzednich podrozdziałach metod: generowania rozwiązań sprawnych za pomocą jednej funkcji kryterium oraz metody satysfakcjonującego poziomu kryteriów. Jest to postępowanie itcracyjne. W i-tej iteracji rozwiązujemy ciąg z.adań jednokryterialnych Z„r gdzie i jest numerem iteracji, natomiast q oznacza numer funkcji celu w rozpatrywanym zadaniu wielokryterialnym. Warunki ograniczające w zadaniu Z,„ to warunki ograniczające wyjściowego zadania wielokryterialncgo oraz pewne dodatkowe warunki, określone na podstawie sformułowanych przez decydenta w poprzednich iteracjach oczekiwań względem poziomu uwzględnianych w modelu kryteriów.
Zestawiamy otrzymane wartości rozwiązań i na ich podstawie tworzymy dwa wektory: wektor ocen akceptowanych oraz wektor ocen optymistycznych. Może się zdarzyć, że wektory te są sobie równe: wtedy kończymy postępowanie, przyjmując otrzymane rozwiązanie jako końcowe. Jeżeli tak nie jest, to korzystając z tych wektorów, decydent określa, czy zamierza kontynuować postępowanie, czy też dokona wyboru rozwiązania końcowego spośród tych rozwiązań zadania Ziq, którymi aktualnie dysponuje. W przypadku wyrażenia przez decydenta chęci kontynuowania postępowania dokonuje on wyboru kryterium (lub kryteriów)
1 określa minimalną wartość (wybraną z przedziału, którego końcami są aktualne wartości: akceptowana i optymistyczna). Przechodząc do i + 1 iteracji, uwzględniamy te minimalne wartości przy konstruowaniu nowego zbioru warunków ograniczających.
Przykład 4.10!’
Stosując metodę interaktywną, rozwiążemy zadanie sformułowane w przykładzie 4.2.
' Przykład ten możemy rozwiązać za pomocą programu INTERAKT.KXE.
Wyszukiwarka
Podobne podstrony:
214 215 Kartograficzne metody prezentacji 6.1.4. Metoda kartogramu Ryc. 633. Kartogram odsetków użyt
240 241 240 Metody wielokryterialne 240 Metody wielokryterialne - I i *>3 = 0,17, w4 = 0,42. Wyko
246 247 246 Metody wielokryterialne 246 Metody wielokryterialne Do jego rozwiązania wykorzystamy met
3. Rodzaje analizy w JST 2 4. Metody analiz wykorzystywane w analizie finansowej JST 2 5. Metody
img063 63 Rozdział A. Nieliniowe sieci neuronowe klasycznej metody backpropagalion z wykorzyslniem e
skanuj0023 (215) 279 6.3. Turystyka golfowa - kontrowersyjna z punktu widzenia idei turystyki... Tab
img063 63 Rozdział A. Nieliniowe sieci neuronowe klasycznej metody backpropagalion z wykorzyslniem e
IMGD48 > Metody organoleptyczne - wykorzystuje się smak i zapach substancji >
5.2. Zastosowania nowoczesnych metod TI. 6. Metody prezentacji z wykorzystaniem technologii
slajd15 (176) EKSPLORACJA DANYCHZadania eksploracji danych: przewidywanie Wszystkie metody i technik
Nr: 20 Metody obliczeniowe - Budownictwo semestr 2 - wykład nr 1 Metody bezpośrednie - wykorzystanie
3.4 Zastosowanie energii odnawialnej w budynkach Metody pasywnego wykorzystania energii słonecznej
5 48. JAK uczyć gramatyki w gimnazjum? : propozycja metodyczna lekcji z wykorzysta
teoretycznych opracowań tego zagadnienia oraz metodycznych propozycji wykorzystania zabaw badawczych
Metody modelowania niepewności - metody półprobabilistyczne (wykorzystanie
Metoda uczenia się - systematycznie stosowany sposób praey ucznia, wielokrotnie wykorzystywany w dzi
więcej podobnych podstron